

Диск СГЭО (Лекции_СГЭО_ВЗО_2012) / Тема 11_Динамика_КШМ_поршневого ДВС
.pdf106
Рис. 11.10. Построение диаграммы движущей силы для двухтактного (а) и четырехтактного (б) дизелей
Рис. 11.11. Примеры диаграмм движущей силы для двухтактного и четырехтактного дизелей
Принято считать, что в двухтактных двигателях линии сгорания-расширения соответствует участок ϕ от 0 до 180ºп.к.в., а линии сжатия – участок от 180 до 360º. В четырехтактных двигателях при ϕ =0…180º происходит сгорание- расширение, при ϕ =180…360º – выпуск, при ϕ =360…540º – наполнение, при
ϕ =540…720º – сжатие.
Пересечение кривой движущей силы pд с осью абсцисс соответствует моменту
времени так называемой вертикальной перекладке поршня, что связано с изменением положения зазора между поршневым пальцем и поршнем. В четырехтактных двигателях перекладка происходит всегда, в двухтактных может наблюдаться при больших силах инерции и низком давлении наддува.
Кривая движущей силы является исходной для построения диаграмм других сил, действующих в КШМ.
107
11.8. Определение сил, действующих в кривошино-шатунном механизме одного цилиндра двигателя
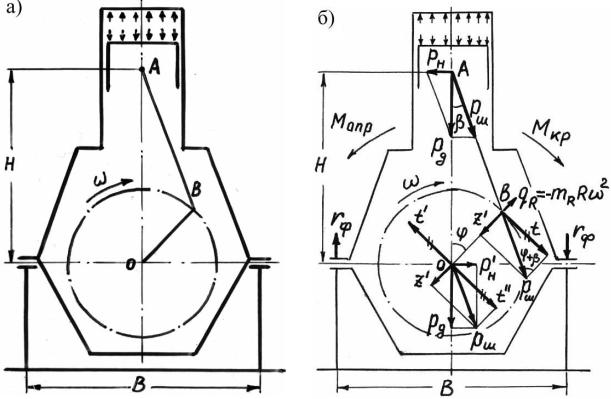
Рис. 11.12. посвящен определению сил, действующих в КШМ одного цилиндра. В целях упрощения понимания сути излагаемого материала на рисунке показаны две стадии построений: на рис. 11.12а – стадия изображения схемы двигателя и его КШМ; на рис. 11.12б – стадия построения схемы сил.
Рис. 11.12. Построение схемы сил, действующих в КШМ одного цилиндра
Движущая сила pд , приложенная к центру головного подшипника в точке А, может быть разложена на две составляющие:
o pш – силу, направленную по оси шатуна (при работе двигателя она либо сжимает,
либо растягивает шатун);
o pн – нормальную силу, направленную перпендикулярно оси цилиндра (она прижимает поршень к втулке цилиндра).
Сила pш может быть перенесена по линии ее действия в центр шатунной шейки в точку B и разложена на две составляющие:
ot – касательную (она направлена по касательной к окружности, описываемой точкой B , и обеспечивает вращение кривошипа);
o z′ – радиальную (направленную вдоль кривошипа и либо сжимающую, либо растягивающую кривошип).
Силу z′ можно перенести по линии ее действия в центр коренного (рамового) подшипника в точку O . Мысленно приложим в точке O взаимно уравновешенные силы t′ и t′′ , параллельные силе t .
Пара сил t и t′ с плечом, равным радиусу кривошипа R , вращает кривошип (коленчатый вал), создавая крутящий момент M кр .
108
Геометрическая сумма сил t′′ и z′ дает результирующую pш , нагружающую коренной (рамовый) подшипник.
Разложив силу pш в точке O , получим силы pд и pн′ .
Пара сил pн и pн′ с плечом H стремится опрокинуть двигатель в сторону,
противоположную направлению вращения, то есть создает опрокидывающий момент
M опр .
Рассмотрим алгоритм расчета сил.
Расчет движущей силы pд изложен выше (см. предыдущий параграф 11.7).
Напомним, что в расчете pд учтены сила давления газов на поршень и сила инерции ПДМ. Кроме того, в случае крейцкопфного дизеля учтен вес ПДМ.
Сила, действующая по шатуну
p |
|
= |
pд |
, |
|
|
|
|
|
(11.23) |
|
|
|
|
|
|
|
||||
ш |
|
cosb |
|
|
|
|
|
|
||
где β – угол отклонения шатуна. |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
Нормальная сила |
|
|
|
|
|
|
|
|
|
|
pн = pд × tgb . |
|
|
|
(11.24) |
||||||
Тангенциальная сила |
|
|
|
|
|
sin (j + b) |
|
|
|
|
t = pш ×sin (j + b) = pд |
|
. |
(11.25) |
|||||||
|
|
|
||||||||
|
cosb |
|||||||||
|
|
|
|
|
|
|
|
|
||
Радиальная сила z′ (составляющая силы p |
, действующей по шатуну) |
|||||||||
|
|
|
|
|
|
ш |
|
|
|
|
z¢ = pш × cos(j + b) = pд |
cos(j + b) |
|
. |
(11.26) |
||||||
|
cosb |
|
||||||||
|
|
|
|
|
|
|
|
|
||
Радиальная сила с учетом силы инерции от неуравновешенных |
|
|||||||||
вращающихся масс |
|
|
|
|
|
|
|
|
|
|
z = z¢ + q |
R |
= z¢ - m Rw2 . |
|
|
(11.27) |
|||||
|
|
|
|
|
R |
|
|
|
|
|
Крутящий момент |
|
|
|
|
|
|
|
|
|
|
M кр = t × Fп × R , |
|
|
|
(11.28) |
||||||
где Fп – площадь поршня. |
|
|
|
|
|
|
|
|
|
|
Опрокидывающий момент |
|
|
|
|
|
|
|
|
|
|
M опр = - pн × Fп × H , |
|
|
|
(11.29) |
||||||
причем M кр = -M опр .
Сила реакции фундамента rф , отнесенная к единице площади поршня,
может быть определена из выражения для момента реакции фундамента
Mф = rф × Fп × В , |
(11.30) |
причем Mф = -M опр = M кр .
В расчетах используются определенные правила знаков. Так при вращении коленчатого вала по часовой стрелке (см. рис. 11.12) положительными считаются:
109
β – при отклонении шатуна вправо;
pн – если вектор силы направлен влево.
При любом направлении вращения положительными считаются:
pд – если вектор силы направлен к оси коленчатого вала;
t – если вектор силы направлен в сторону вращения коленчатого вала; z – если вектор силы направлен к оси коленчатого вала;
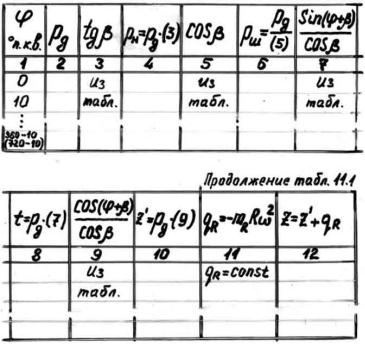
Расчет сил, действующих в КШМ, может быть выполнен в табличной форме, пример которой дан в табл. 11.1.
Таблица 11.1
Расчет сил, действующих в кривошипно-шатунном механизме
В таблицу вносят результаты расчета сил для каждого угла ϕ , ºп.к.в. с некоторым шагом
(в данном примере указан шаг 10 ºп.к.в.). Движущую силу pд указывают с учетом знака.
Значения тригонометрических функций либо рассчитывают отдельно, либо выписывают из специальных таблиц, составленных для различных постоянных КШМ λ .
По данным таблицы строят диаграммы сил, в частности, сил, показанных на рис. 11.13.
110
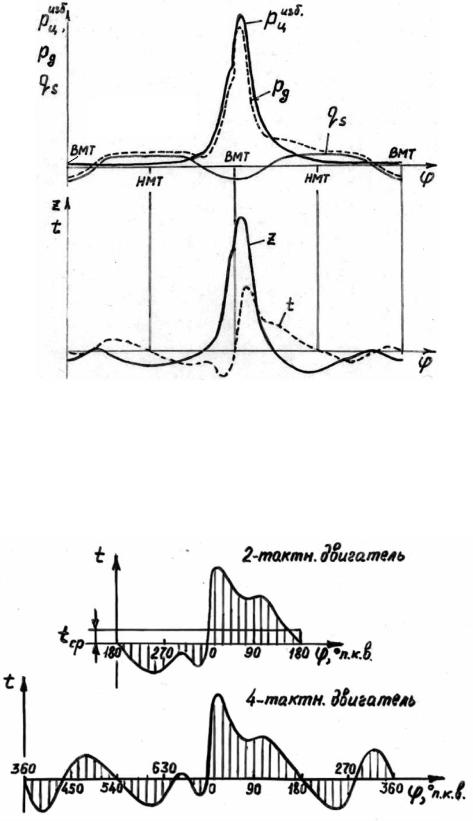
Рис. 11.13. Диаграммы сил, действующих в кривошипно-шатунном механизме
11.9. Диаграмма тангенциальных сил одного цилиндра, средняя тангенциальная сила
Примеры диаграмм тангенциальных сил для одного цилиндра двух- и четырехтактного двигателей показаны на рис. 11.14.
Рис. 11.14. Диаграммы тангенциальных сил одного цилиндра двух- и четырехтактного двигателей
Напомним, что при положительных значениях силы t направление ее действия совпадает с направлением вращения коленчатого вала. Обратим внимание также на то, что в диапазонах углов 360–540 º п.к.в. и 180–360 º п.к.в., соответствующих насосным

111
ходам поршня, когда уровень давления в цилиндре весьма низок, сила t в значительной мере определяется силой инерции ПДМ.
По таким диаграммам можно проверить правильность расчетов проектируемого двигателя. Для этого необходимо определить среднюю (по углу поворота кривошипа)
тангенциальную силу tср . |
|
|
Средняя |
тангенциальная сила tср – это |
условная постоянная сила, которая |
определяется |
из условия равенства работ цикла |
при t = tср = const и при реальной |
t = var .
Рассмотрим тангенциальную диаграмму двухтактного двигателя (см. рис. 11.14).
Средняя |
тангенциальная сила определяется как отношение площади между линией |
t = f (ϕ) |
и осью абсцисс к длине диаграммы. При этом площади, расположенные над |
осью абсцисс следует считать положительными, а площади, расположенные под осью абсцисс – отрицательными.
Проще всего для определения площадей воспользоваться планиметром. При отсутствии планиметра площади можно вычислить одним из способов приближенного интегрирования.
Проверка правильности расчетов проектируемого двигателя может состоять в следующем. Работу за один цикл можно выразить через среднее индикаторное
давление pi или через среднюю тангенциальную силу |
tср . В таком случае |
|
равенство выражений работы для двухтактного двигателя можно записать |
||
|
pi Fп2R = tсрFпR2π , |
(11.31) |
|
|
|
где pi определяется в расчете рабочего цикла двигателя; произведение представляет собой средний крутящий момент M кр.ср , создаваемый одним
цилиндром двигателя. Тогда
t |
|
= |
pi |
|
– |
для двухтактного двигателя; |
(11.32) |
|
ср |
π |
|||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
t |
|
= |
pi |
– |
для четырехтактного двигателя. |
(11.33) |
||
ср |
2π |
|||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
Если значения tср , определенные по указанным формулам и по рис. 11.4 (с
учетом масштаба диаграммы), различаются не более чем на 5%, то, следовательно, расчеты динамики проведены правильно. Если же расхождение превышает 5%, то необходимо найти и устранить ошибку в расчетах.
11.10. Построение диаграммы суммарной тангенциальной силы многоцилиндрового двигателя. Средняя суммарная тангенциальная сила
Текущая тангенциальная сила t в некотором цилиндре двигателя определяет текущий крутящий момент t × Fп × R , создаваемый данным цилиндром.
При любом угловом положении коленчатого вала на его выходном фланце действует текущая суммарная тангенциальная сила tΣ , которая определяется суммированием сил
112
t (с учетом их знаков), действующих в каждом цилиндре многоцилиндрового двигателя. Таким образом, текущая суммарная тангенциальная сила tΣ определяет текущий суммарный крутящий момент МΣ кр = tΣ × Fп × R , создаваемый двигателем.
Нумерация цилиндров и шеек коленчатого вала начинается со стороны «свободного» конца вала, не соединенного с потребителем мощности двигателя. Если отсутствует отбор мощности от указанного «свободного» конца вала, то первая коренная (рамовая) шейка коленчатого вала не нагружена тангенциальной силой. Коренная шейка вала между 1-м и 2-м цилиндрами нагружена тангенциальной силой t , создаваемой 1-м цилиндром. Коренная шейка вала между 2-м и 3-м цилиндрами нагружена тангенциальной силой, равной сумме тангенциальных сил от 1-го и 2-го цилиндров ( Σ t1 − 2 ), причем каждая из
указанных суммируемых сил находится в своей фазе, определяемой текущим углом поворота коленчатого вала и углами заклинки его колен. Аналогично, добавляя к текущей Σ t1 − 2 текущую тангенциальную силу, создаваемую 3-м цилиндром, получаем
Σ t1 − 3 . Указанную операцию поэтапного суммирования продолжают, добавляя очередной цилиндр, вплоть до получения текущей суммарной тангенциальной силы tΣ ,
действующей на последней коренной шейке коленчатого вала. Силы Σ t1 − 2 , Σ t1 − 3 (и
т.д.) называются набегающими тангенциальными силами на шейках коленчатого вала.
Описанный порядок вычислений текущих набегающих тангенциальных сил Σ t i − (i + 1 ) и текущей суммарной тангенциальной силы tΣ показан на рис. 11.15 и
11.16.
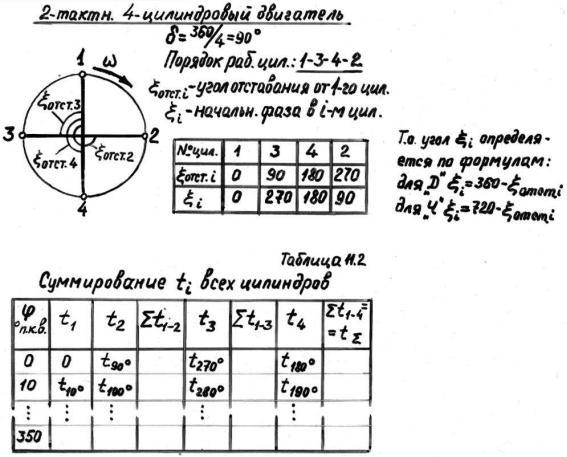
Рис. 11.15. Определение набегающих тангенциальных сил и суммарной тангенциальной силы в двухтактном четырехцилиндровом двигателе

113
Рис. 11.15. относится к двухтактному четырехцилиндровому двигателю.
В верхнем левом углу рисунка изображена схема заклинки кривошипов коленчатого вала, которая представляет по существу вид вала в направлении его оси. Угол заклинки
для двухтактного двигателя определяется по формуле δ = 360 i = 90 ºп.к.в., где i – число цилиндров в двигателе. Порядок работы цилиндров в данном примере принят 1–3–4–2.
Расчеты динамики принято проводить для положения коленчатого вала, при котором кривошип 1-го цилиндра находится в ВМТ. Для каждого i -го цилиндра определяют угол отставания ξотст. i от первого цилиндра так, как это показано на рисунке. Начальную
фазу работы каждого цилиндра ξi вычисляют по формуле для двухтактного двигателя ξi = 360 − ξотст. i . Начальная фаза работы 1-го цилиндра ξ1 =0 ºп.к.в., поэтому значения тангенциальной силы t1 записывают в табл. 11.2 (см. рис. 11.15) из диаграммы тангенциальных сил одного цилиндра (см. рис. 1.14), начиная с 0 ºп.к.в. В приведенном примере значения t записывают с шагом 10 ºп.к.в. В соответствии с начальной фазой
каждого i -го цилиндра в графах таблицы записывают значения сил ti , как показано в таблице. В графах « Σ t1 − 2 », « Σ t1 − 3 » и « Σ t1 − 4 » для каждого углового положения коленчатого вала ( ϕ ,ºп.к.в.) в виде нарастающего итога вычисляют набегающую тангенциальную силу на шейках коленчатого вала, причем на последней шейке вала получается суммарная тангенциальная сила: Σ t1 − 4 = t Σ .
Рис. 11.16. Определение набегающих тангенциальных сил и суммарной тангенциальной силы в четырехтактном шестицилиндровом двигателе
114
Рис. 11.16. относится к четырехтактному шестицилиндровому двигателю.
Показанный на рисунке порядок определения набегающих тангенциальных сил и суммарной тангенциальной силы аналогичен порядку в предыдущем примере. Отличия состоят в следующем:
–угол заклинки кривошипов для четырехтактного двигателя определяется по формуле
δ= 720 i = 120 ºп.к.в.;
–порядок работы цилиндров в данном примере принят 1–5–3–6–2–4;
–начальная фаза работы каждого цилиндра xi вычислена по формуле для
четырехтактного двигателя xi = 720 - xотст. i .
Итак, в последней графе табл. 11.2 и табл. 11.3 указаны значения текущей суммарной
тангенциальной силы t Σ |
, которая, напомним, определяет текущий крутящий момент |
tΣ × Fп × R , создаваемый |
двигателем. Построенная по этим значениям диаграмма |
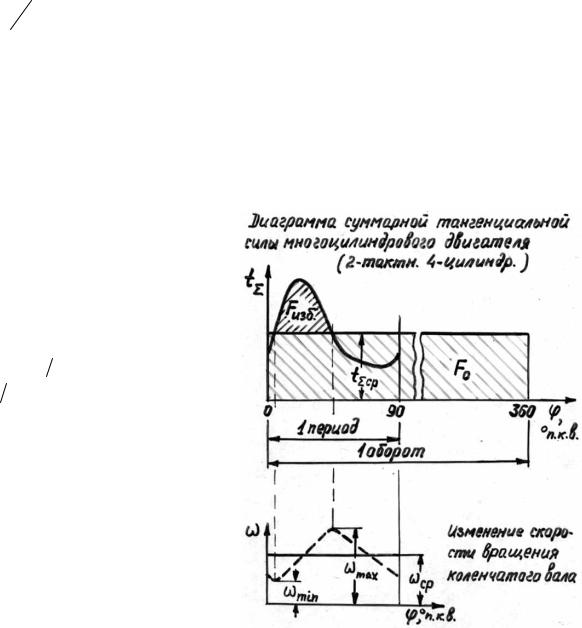
суммарной тангенциальной силы представлена на рис. 11.17.
Диаграмма построена применитель- но к двухтактному четырех-
цилиндровому |
двигателю. |
Она |
||
свидетельствует |
о |
переменности |
||
крутящего момента двигателя. |
|
|||
Кривая |
t Σ |
= |
f (ϕ ) |
для |
двухтактного |
|
двигателя |
имеет |
|
период 360 i |
(для четырехтактного |
|||
– 720 i ). |
|
|
|
|
Средняя суммарная танген- циальная сила tΣ ср определяется
как отношение площади между линией tΣ = f (ϕ) и осью абсцисс к
длине диаграммы. При этом площади, расположенные над осью абсцисс следует считать положительными, а площади, расположенные под осью абсцисс – отрицательными.
Средний |
крутящий |
момент, |
Рис. 11.17. Диаграмма суммарной тангенциальной |
||||
создаваемый |
многоцилиндровым |
|
|
|
силы |
||
двигателем, |
рассчитывается |
по |
|
|
|
||
|
|
|
|
||||
формуле |
|
|
|
|
|
|
|
M Σ кр.ср = tΣ ср × Fп × R . |
(11.34) |
|
|
|
|
||
Проверка правильности расчета |
tΣ ср и динамики двигателя в целом может быть |
||||||
выполнена по расчетной индикаторной мощности двигателя |
|
|
|||||
|
|
Ni |
= M Σ кр.срω = M Σ кр.ср |
πn |
, |
(11.35) |
|
|
|
30 |
|||||
|
|
|
|
|
|
|
|
115
где n – частота вращения коленчатого вала, мин–1 .
Если рассчитанная по формуле (11.35) Ni отличается от индикаторной мощности,
указанной в расчете рабочего цикла двигателя не более чем на 5%, то можно считать, что расчеты динамики проведены правильно.
11.11. Причины возникновения неравномерности вращения коленчатого вала. Определение степени неравномерности вращения
Отмеченная выше переменность крутящего момента, создаваемого двигателем, с одной стороны (см.11.10), и возможная переменность момента сил сопротивления вращению коленчатого вала, с другой стороны (от гребного винта, от трения и т.д.), вызывают неравномерность вращения вала двигателя, то есть непостоянство угловой скорости ω . Чем больше разность между текущим крутящим моментом и текущим моментом сопротивления вращению, а также чем меньше момент инерции движущихся деталей двигателя θд (а в общем случае и приемника энергии), тем с большим
ускорением или замедлением вращается коленчатый вал.
Примем, что суммарный момент всех сил сопротивления постоянен и равен M Σ кр.ср
(с обратным знаком), то есть в соответствии с формулой (11.34) пропорционален tΣ ср .
Тогда в диапазоне углов п.к.в., в котором крутящий момент больше момента сил сопротивления, то есть при tΣ > tΣ ср (см. рис. 11.17), создается положительная
избыточная работа Fизб , которая тратится на увеличение кинетической энергии движущихся деталей, и в результате происходит увеличение ω . Напротив, в диапазоне углов п.к.в., в котором tΣ < tΣ ср , происходит уменьшение ω .
Переменность ω оценивают степенью неравномерности вращения коленчатого
вала δs |
|
|
|
|
ωmax − ωmin |
|
|
|
||
|
|
δ |
s |
= |
, |
|
(11.36) |
|||
|
|
|
|
|
||||||
|
|
|
|
|
|
ωср |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где средняя угловая скорость |
ωmax |
+ ωmin |
|
|
|
πn |
||||
ωср = |
|
|
wср = |
|||||||
|
|
|
|
|
|
или |
|
. |
||
|
|
2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
30 |
|
Равномерность вращения тем лучше, чем меньше δs . |
|
|||||||||
Рекомендуемые значения δs |
лежат в следующих пределах: |
δs = 1/20 – 1/50; |
||||||||
o для двигателей, работающих на гребной винт |
|
|
||||||||
o для дизель-генераторов постоянного тока |
|
|
|
δs = 1/100 – 1/150; |
||||||
o для дизель-генераторов переменного тока |
|
|
|
δs = 1/150 – 1/250. |
||||||
Степень неравномерности |
вращения коленчатого |
вала |
проектируемого двигателя |
|||||||
может быть рассчитана с использованием диаграммы суммарной тангенциальной силы (см. рис. 11.17) и формулы
|
|
ds = 3,076 ×106 |
Ni |
× |
Fизб |
, |
(11.37) |
|
|
qдn3 |
|
||||
|
|
|
|
F0 |
|
||
где Ni – индикаторная мощность двигателя, кВт; |
|
|
|
|
|||
θ |
д |
– приведенный момент инерции движущихся масс, кг·м2; |
|
||||
|
|
|
|
|
|
|
|