

Laboratornaya_Rabota_6
.pdfОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
На основании исследованных данных динамического режима заданных средств измерений при ступенчатом изменении входного сигнала была определена динамическая погрешность при параметрах со следующими значениями: f0 = 1.6, β = 0.3. Далее была определена погрешность в 8 точках на одном полупериоде входного сигнала. Результаты представлены на табл. 1.
Таблица 1 – Динамическая погрешность. Опыт 1.
Опыт 1
t |
0,1 |
0,18 |
0,25 |
0,34 |
0,42 |
0,48 |
0,58 |
0,74 |
|
|
|
|
|
|
|
|
|
Uвх |
3,64 |
3,64 |
3,64 |
3,64 |
3,64 |
3,64 |
3,64 |
3,64 |
|
|
|
|
|
|
|
|
|
Uвых |
2,68 |
3,64 |
6,54 |
3,64 |
2,71 |
3,64 |
4,14 |
3,6 |
|
|
|
|
|
|
|
|
|
∆U |
0,96 |
0,00 |
-2,90 |
0,00 |
0,93 |
0,00 |
-0,50 |
0,04 |
|
|
|
|
|
|
|
|
|
Пример вычисления ∆:
∆1 = вх1 −вых1 = 3,64 – 2,68 = 0,96
Покажем график зависимости Uвх и Uвых от t, он изображен на рисунке ниже (см. рис. 1).
Uвх, Uвых
U, В
7
6
5
4
3
2
1
0
0,1 |
0,18 |
0,25 |
0,34 |
0,42 |
0,48 |
0,58 |
0,74 |
t, мс
Uвх Uвых
Рисунок 1 – График зависимости Uвх(t), Uвых(t)
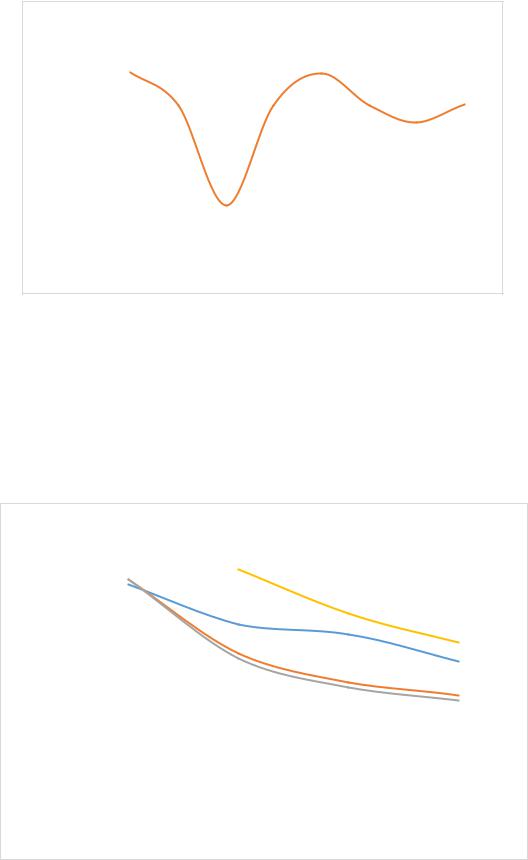
Далее приведём график зависимости динамической погрешности от времени t, он изображён ниже (см. рис. 2).
11
del_U_1
|
|
|
1,50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1,00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
0,50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
0,00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
B |
-0,50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
dU, |
-1,00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
-1,50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
-2,00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
-2,50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
-3,00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t, |
мс |
||
|
|
|
-3,50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
0,1 |
0,18 |
0,25 |
0,34 |
0,42 |
0,48 |
0,58 |
0,74 |
||||||||||
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
del_U |
0,96 |
0 |
-2,9 |
0 |
0,93 |
0 |
-0,5 |
0,04 |
||||||||
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2 – График зависимости ∆U от t
На основании полученных данных (таблица для ty) были построены графики зависимости ty = F(f0i) при β = const (см. рис. 3). При определении времени установления была принята погрешность асимптотического приближения переходного процесса равная 5% от установившегося входного значения.
ty = F(f0i)
|
|
|
1,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
t, мс |
0,8 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
0,6 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
0,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
0,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,4 |
0,8 |
1,2 |
1,6 |
f, Гц |
||||||
|
|
|
|
|
|||||||||
|
|
|
|
t_1 |
1,18 |
0,88 |
0,8 |
0,6 |
|
||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
t_2 |
1,22 |
0,66 |
0,44 |
0,34 |
|
||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
t_3 |
1,22 |
0,62 |
0,4 |
0,3 |
|
||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
t_4 |
|
|
1,3 |
0,96 |
0,74 |
|
|||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 3 – График ty = F(f0i)
На основании полученных данных (таблица для ty) были построены
12
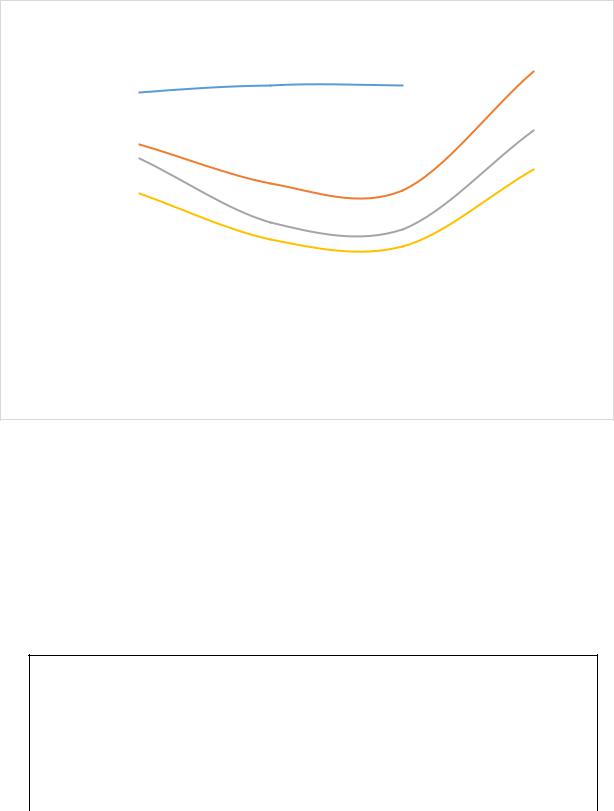
графики зависимости ty = F(βi) при f0 = const (см. рис. 4).
ty = F(βi)
1,4 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
1,2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
0,8 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
t, мс |
|
|
|
|
|
|
|
|
||||
0,6 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
0,4 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
0,2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
f, Гц |
|||||
0 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
0,3 |
0,7 |
1 |
2 |
|||||||||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
t_1 |
1,18 |
1,22 |
1,22 |
|
|
||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
t_2 |
0,88 |
0,66 |
0,62 |
1,3 |
|||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
t_3 |
0,8 |
0,44 |
0,4 |
0,96 |
|||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
t_4 |
0,6 |
0,34 |
0,3 |
0,74 |
|||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 4 – График ty = F(βi)
На основании исследованных данных динамического режима заданных средств измерений при синусоидальном входном воздействии была определена динамическая погрешность при параметрах со следующими значениями: f0 = 1.2, β = 2. Далее была определена погрешность в 9 точках на одном периоде входного сигнала. Результаты представлены на табл. 2.
Таблица 2 – Динамическая погрешность. Опыт 3
Опыт 3
t |
0,15 |
0,5 |
0,78 |
1 |
1,2 |
1,4 |
1,6 |
1,8 |
2 |
|
|
|
|
|
|
|
|
|
|
Uвх |
2,28 |
3,96 |
2,56 |
0,37 |
-1,98 |
-3,66 |
-4,48 |
-4,02 |
-2,6 |
|
|
|
|
|
|
|
|
|
|
Uвых |
-0,23 |
2,62 |
3,23 |
2,32 |
0,66 |
-1,12 |
-2,76 |
-4,02 |
-3,47 |
|
|
|
|
|
|
|
|
|
|
∆U |
2,51 |
1,34 |
-0,67 |
-1,95 |
-2,64 |
-2,54 |
-1,72 |
0 |
0,87 |
|
|
|
|
|
|
|
|
|
|
Пример вычисления ∆:
∆1 = вх1 −вых1 = 2,28 + 0,23 = 2,51
13
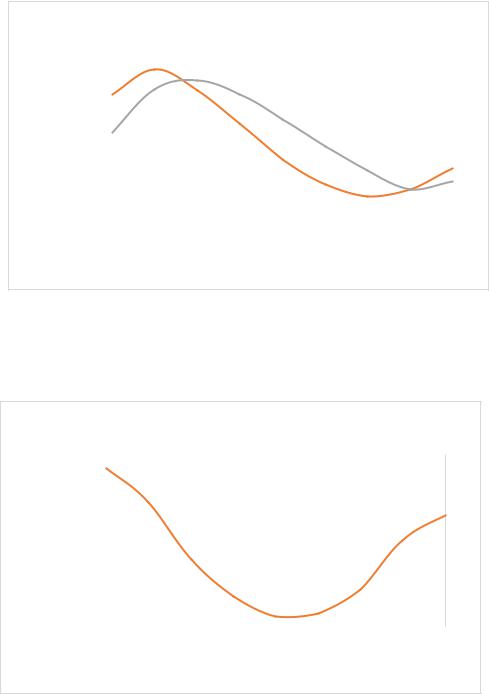
Покажем график зависимости Uвх и Uвых от t, он изображен на рисунке ниже (см. рис. 5).
Uвх, Uвых_2
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t, |
мс |
|
|
|
|
-5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,15 |
0,5 |
0,78 |
1 |
1,2 |
1,4 |
1,6 |
1,8 |
2 |
||||||||||
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
Uвх |
2,28 |
3,96 |
2,56 |
0,37 |
-1,98 |
-3,66 |
-4,48 |
-4,02 |
-2,6 |
|||||||||
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
Uвых |
-0,23 |
2,62 |
3,23 |
2,32 |
0,66 |
-1,12 |
-2,76 |
-4,02 |
-3,47 |
|||||||||
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 5 - График зависимости Uвх(t), Uвых(t)
Далее приведём график зависимости динамической погрешности от времени t, он изображён ниже (см. рис. 6).
del_U_2
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
dU, |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t, |
мс |
|
|
|
|
-3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,15 |
0,5 |
0,78 |
1 |
1,2 |
1,4 |
1,6 |
1,8 |
2 |
||||||||||
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
del_U |
2,51 |
1,34 |
-0,67 |
-1,95 |
-2,64 |
-2,54 |
-1,72 |
0 |
0,87 |
|||||||||
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 6 - График зависимости  U от t
U от t
Выводы.
По ходу выполнения лабораторной работы выяснилось, что при ступенчатом изменении входного сигнала коэффициент демпфирования
14
оказывает гораздо большее влияние на динамическую погрешность, чем частота собственных колебаний. С ростом коэффициента затухания среднее значение динамической погрешности уменьшается.
То же самое происходит и с влиянием этих параметров на характер выходного сигнала: с увеличением коэффициента демпфирования значение выходного сигнала изменяется на десятые доли в меньшую сторону, в то время как при изменении частоты результаты совпадают с точностью до сотых.
Что касается времени установления выходного сигнала, то при константном значении коэффициента затухания и увеличении частоты собственных колебаний время установления уменьшается. В случае с фиксированной частотой и увеличением коэффициента демпфирования время установления сперва идёт на убыль, достигает своего минимума, а затем начинает расти.
При синусоидальном изменении входного сигнала динамическая погрешность, как и в прошлом случае, существенно изменяется лишь при увеличении коэффициента затухания. Частота же на динамическую погрешность почти не влияет.
На основе графика (см. рис. 6), выяснилось, что максимальное амплитудное значение динамической погрешности составляет 2.64 B, при значении времени установления, равном 1.2 мс.
15