

3.01.(Полина Митасова) Назначение, цели и функции систем управления химико-технологическими процессами.

3.02. Особенности управления химико-технологическими процессами. Основные типы систем автоматического регулирования.
Под химико-технологическим процессом (ХТП) понимают определенную последовательность процессов (химических, физико-химических, их сочетаний) целенаправленной переработки исходных сырья и веществ в продукт. Химическое производство представляет собой совокупность процессов и операций, осуществляемых в аппаратах и машинах и предназначенных для целенаправленной переработки исходных веществ и сырья в продукты путем химических превращений. Вопросам управления в химической технологии придается особое значение.
Это, в первую очередь, связано со следующими особенностями ХТП:
1) сложность и высокая скорость протекания ХТП;
2) агрессивность и токсичность перерабатываемых веществ;
3) взрыво- и пожароопасность перерабатываемых веществ;
4) высокие (или низкие) температуры; высокие (сверхвысокие) давления или глубокий вакуум;
5) высокая чувствительность ряда ХТП к нарушениям технологического режима и т. д. Необходимо учитывать и такое важное обстоятельство для управления: не все технологические параметры (показатели), которыми необходимо управлять в процессе, доступны непосредственному и непрерывному измерению.
Необходимо также помнить, что управление будет более эффективным, если выбранный управляемый параметр чувствителен к условиям проведения ХТП. Тогда даже небольшие отклонения текущих значений управляемого параметра от заданного вызовут к действию систему управления.
Для химико-технологических процессов, осуществляемых в крупнотоннажных химических и нефтехимических производствах, характерно запаздывание и параметры (показатели), выбранные для управления, при изменении условий проведения процесса не могут изменяться мгновенно – это усложняет систему управления ХТП. Кроме того, все время необходимо учитывать степень воздействия химических производств на окружающую среду.
Основные типы САР (система автоматич.регулирования):
В зависимости от основной цели задачи управления САР классифицируются следующим образом: системы стабилизации, система программного управления, следящие системы.
В системах стабилизации рабочий параметр объекта (регулируемая величина) поддерживается постоянным во времени при постоянном задании. В системах программного управления рабочий параметр объекта изменяется во времени по заранее известному закону, в соответствии с которым изменяется задание. В следящих системах рабочий параметр объекта изменяется во времени по заранее неизвестному закону, который определяется каким-то внешним независимым
3.03. Классификация регуляторов по различным признакам.
Регуляторы:
Линейные и нелинейные (позиционные)
Линейные
Пропорциональный (П-регулятор)

Быстродействие. - Неточность (наличие стат. погрешности)
Интегральный (И-регулятор)

Точность (отсутствие стат. погрешности) . - Не обладает быстродействием
- Фазовый сдвиг -п/2 (меньшая уст.)
Пропорционально-интегральный (ПИ-регулятор)

Точность (отсутствие стат. погрешности). - Велика макс. ошибка
Быстродействие.
Пропорционально-дифференциальный (ПД-регулятор)

Быстродействие. - Наличие стат. погрешности (меньше, чем у проп-го. рег-ра)
Малая максимальная ошибка
Пропорционально-интегрально-дифференциальный (ПИД-регулятор).

Нулевая стат. ошибка (погрешность) . - Сложность настройки регул-ра.
Малое время переход процесса.
Малая макс. ошибка
Нелинейные (позиционные)
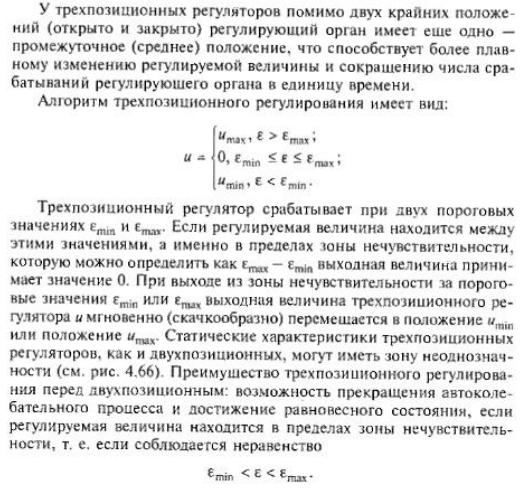
Двухпозиционные

Трехпозиционные
3.04. Классификация систем автоматического управления по различным признакам.
1. По принципу управления – определение, какую текущую информацию использует управляющее устройство.
САУ по задающему воздействию – используется только информация о цели управлению. Характерна разомкнутая цепь воздействий, т.е. управляющее устройство оказывает воздействие на объект управления, но обратное воздействие отсутствует.
Достоинство – простота конструктивной реализации, но ОУ должен быть хорошо изучен и его св-ва и возмущающие воздействия остаются постоянными.
САУ по возмущающему воздействию – кроме информации о цели управления используется информация о возмущающих действиях. Характерно: разомкнутое управление (отсутствие информации об управляемом параметре); необходимо точно выбрать канал, по которому может проявиться главное возмущающее воздействие; нельзя использовать при управлении нейтральными и неустойчивыми объектами.
Достоинства: быстродействие, возможность полной компенсации выбранного возмущающего действия, отсутствие проблем, связанных с устойчивостью.
Недостатки: учитывается только 1 возмущ. воздействие, не контролируется результат управляющего воздействия, необходима надежная информация о функциональных взаимосвязях величин.
САУ по отклонению – используется информация о цели управления и отклонении текущего значения управляемого параметра от заданного значения. Взаимодействие между ОУ и УУ осуществляется как по цепи прямой связи, так и по цепи обратной связи. Информация передается по замкнутому контуру.
Достоинства (с обратной связью): учитывают все возмущающие воздействия, требуется минимум информации о процессе.
Недостатки: метод проб и ошибок, присутствует запаздывание и отсутствует быстродействие, при определенном сочетании св-в ОУ и УУ система управления может стать неустойчивой.
комбинированные САУ – использование информации о возмущающем воздействии, задающем воздействии и управляемом параметре. Более высокое качество управления в сравнении с САУ по отклонению. Обладает точностью и быстродействием.
2. По характеру изменения задающего воздействия
системы автоматической стабилизации – tзд = const;
Область применения: непрерывные ХТП, в которых управляемый параметр нужно поддерживать на заданном постоянном значении.
системы программного регулирования – задающее воздействие явл известной ф-цией времени.
Область применения: управление периодическими ХТП.
следящие системы – задающее воздействие явл неизвестной заранее ф-цией времени.
Область применения:

3. По числу контуров
Одноконтурная САУ – замкнутая система управления с одной регулируемой величиной, имеющая одну главную обратную связь.
Многоконтурная САУ – это замкнутая система управления, имеющая помимо одного контура главной обратной связи другие главные обратные связи, т.е. это система с несколькими контурами управления.
4. По числу управляемых величин

5. По характеру управляющих воздействий
Непрерывные – контролер непрерывно изменяет управляющее воздействие в зависимости от изменения задающего воздействия и управляемой величины
Дискретные – контролер вырабатывает управляющее воздействие, принимающее одно из нескольких возможных значений. Через дискретные промежутки времени происходит размыкание или замыкание цепи воздействия.
А) дискретные импульсные системы – размыкание цепи воздействий выполняется принудительно и периодически специальным устройством.
Б) релейные системы - размыкание или замыкание цепи воздействий выполняется одним из элементов системы при непрерывном значении входного воздействия.
6. По виду зависимости установившейся ошибки от внешнего воздействия
7. По энергетическим признакам

8. По математическому описанию
3.05.(Ася Королькова) Системы автоматического управления без обратной связи и с обратной связью. Комбинированные системы управления.
Без обратной связи: в системе управления по возмущающему воздействию кроме информации о цели управления используется информация о возмущающих воздействиях. Одна из задач управляющего устройства при этом заключается в формировании такого управляющего воздействия, которое компенсировало бы влияние на объект управления измеренного возмущающего воздействия. Поэтому принцип управления по возмущающему воздействию называют также принципом компенсации.
Достоинства такого принципа:
а) быстройдействие, тк возмущающее воздействие может быть скомпенсировано до появления рассогласования между текущим значением регулируемого параметра и его заданным значением.
Б) возможность (теоретическая) полной компенсации выбранного возмущающего воздействия
В) отсутвие проблем, связанных с устойчивостью
Недостатки:
А) учитываются не все возмущающие воздействия, а только одно, тем самым не обеспечивается высокая точность управления (особенно это проявляется при наличии неконтролируемых возмущающих воздействий)
Б) не контролируется результат управляющего воздействия
С обратной связью: управление по отклонению осуществляется на основе информации о состоянии объекта управления. Взаимодействие между ОУ и УУ осуществляется как по цепи прямой связи – от УУ к ОУ, так и по цепи обратной связи – от ОУ к УУ. При этом информация передается по замкнутому контуру (контуру регулирования), поэтому управление по отклонению называют замкнутым или управлением с обратной связью.
Достоинства:
А) учитываются все возмущающие воздействия, оказывающие влияние на управляемый параметр (температуру реакционной смеси в реакторе)
Б) требуется минимум информации о процессе (в данном случае информация только о температуре реакционной смеси в реакторе)
Недостатки:
А) управление по отклонению осуществляется методом проб и ошибок
Б) в системе управления по отклонению присутствует запаздывание, поскольку учитываются все возмущающие воздействия (по всем каналам изменения расходов, компонентов, продукта, изменения температуры окружающей среды)
Комбинированное управление: для комбинированных систем управления характерно использование информации о возмущающем воздействии, задающим воздействии и управляемом параметре. Комбинированные системы управления имеют более высокое качество управления. Комбинированная система управления обладает точностью и быстродействием.
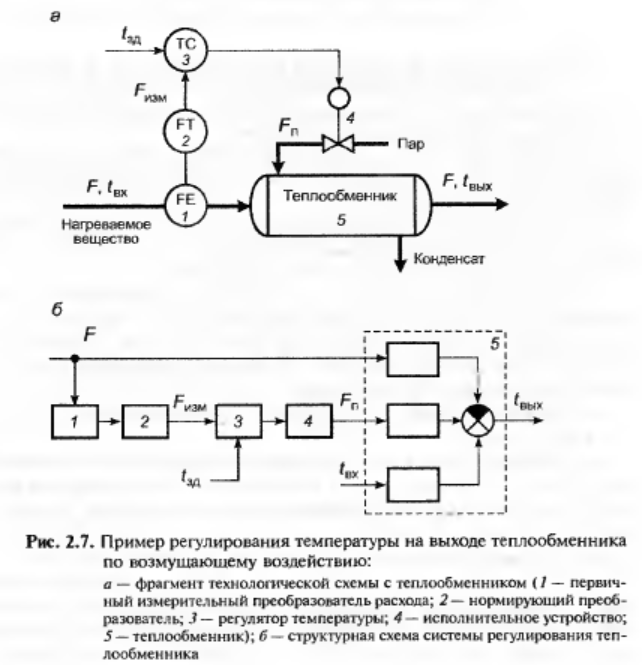
3.06.(Полина Тапехина) Регулирование без обратной связи (регулирование по возмущающему воздействию).
В системе управления по возмущающему воздействию кроме информации о цели управления используют также информацию о возмущающих воздействиях
Задача: формирование такого управляющего воздействия, которое будет компенсировать влияние измеренного возмущающего воздействия на объект управления. (Также называют принципом компенсации)
Есть некоторое одно основное возмущающее воздействие сильно влияющее на систему
Используется в случае, когда хорошо изучены свойства объекта управления (типа математически). Качество управления выше по сравнению с управлением по задающему воздействию, тк мы можем компенсировать влияние одного из возмущающих воздействий (основного), растет быстродействие.
Структурная схема:
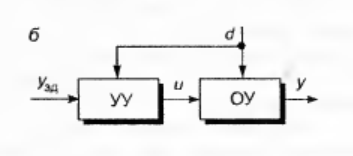
Характерные признаки:
разомкнутое управление (без обратной связи), следовательно, не поступает информация об управляемом параметре
необходимо точно и верно выбрать канал, по которому может проявиться главное возмущающее воздействие
не используется в СУ нейтральными и неустойчивыми объектами
Достоинства:
Быстродействие за счет компенсации возмущающего воздействия еще до рассогласования между текущим значением регулируемого параметра и его заданным значением
Возможность (теоретическая) полной компенсации выбранного возмущающего воздействия
Нет проблем связанных с устойчивостью
Недостатки:
Учитывается только одно возмущающее воздействие, следовательно, супер высокая точность не достигается (особенно критично при наличии неконтролируемых возмущающих воздействий)
Нет контроля результата управляющего воздействия
Необходима надежная информация о функциональной взаимосвязи между (например) расходом Аа, степенью открытия клапана и регулируемой температурой, которая, как правило, не линейна, не всегда точно известна и может изменяться в процессе функционирования аппарата
Стоимость выше, чем у управления по задающему воздействию из-за затрат на измерение возмущающего воздействия
Далее пример из учебника


3.07. (Мария Филатова)Одноконтурные и многоконтурные системы автоматического регулирования.


3.08. (Татьяна Колиш)Многоконтурные системы автоматического регулирования (системы связанного регулирования).
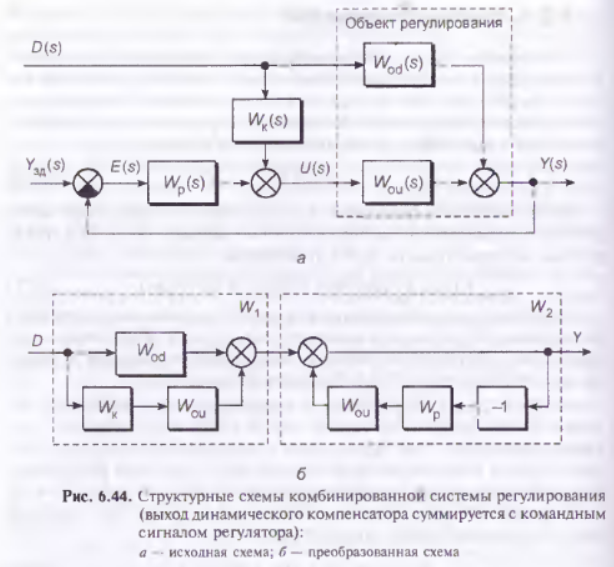
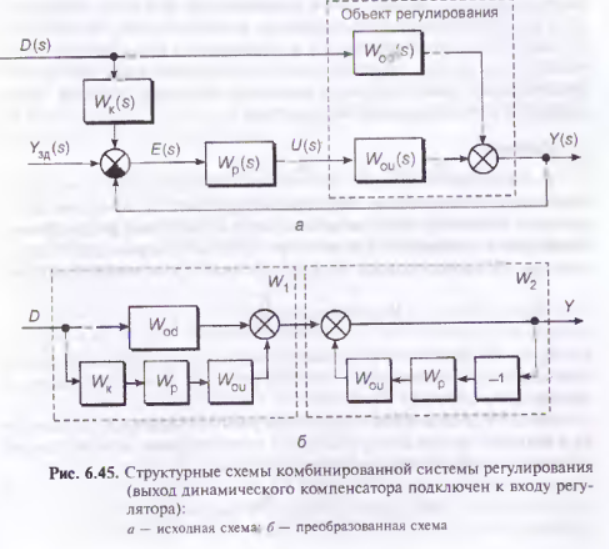
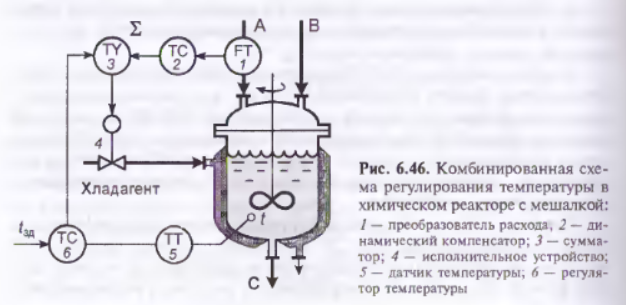
Системы связанного регулирования - комбинированные САР, сочетающие обычный замкнутый контур регулирования с дополнительным каналом воздействия, по которому через динамический компенсатор вводится импульс по возмущению.
Принцип инвариантности: отклонение выходной координаты у(τ) системы регулирования от заданного значения под действием возмущающего воздействия d(τ) должно быть тождественно равно нулю при любых возмущающих воздействиях
![]()





3.09. (Елизавета Романова)Многоконтурные системы автоматического регулирования (системы каскадного регулирования).
В свою очередь многомерные САР делятся на
системы несвязанного и связанного регулирования. Характерным для первых является то, что регуляторы в них непосредственной связи между собой не имеют и взаимодействуют только через объект регулирования. В системах связанного регулирования регуляторы различных параметров одного и того же объекта имеют непосредственные взаимные связи помимо связей через объект регулирования. Многие объекты химической технологии обладают существенным запаздыванием и характеризуются значительными возмущениями. Использование одноконтурных систем при автоматизации таких объектов не позволяет обеспечить высокого качества регулирования. Поэтому для повышения качества регулирования этих объектов используют более сложные АСР.
В каскадных системах при регулировании основной технологической величины в объекте с большим запаздыванием используются также вспомогательные величины, реагирующие на изменение основных возмущений объекта и регулирующего воздействия с меньшим запаздыванием. В таких случаях стабилизация вспомогательных
величин способствует более качественному регулированию основной величины. Каскадная система состоит из нескольких контуров регулирования, каждый из которых регулирует свою технологическую (основную или вспомогательную) величину. Однако применение каскадных схем эффективно только в том случае, когда запаздывание в контуре регулирования основной величины существенно больше, чем в контуре регулирования вспомогательной величины. При автоматизации химико-технологических объектов чаще всего используют двухконтурные каскадные системы. Примером может служить двухконтурная система регулирования температуры низа
ректификационной колонны, поддерживаемая изменением подачи греющего пара в кипятильник.
3.10.(Даша Хмыз) Функциональная структура системы автоматического регулирования.
Функциональная структурная схема системы автоматического регулирования с одной регулируемой величиной y(τ) представлена на рисунке:
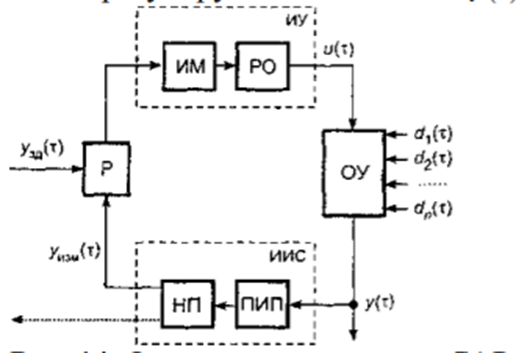
ОУ — объект управления; ПИП — первичный измерительный преобразователь; НП —нормирующий преобразователь; ИИС — информационно-измерительная система; Р —регулятор; ИУ — исполнительное устройство; ИМ — исполнительный механизм; РО —регулирующий орган.
Система состоит из объекта управления (ОУ) и управляющего устройства. В химической технологии ОУ может быть, например, реактор, в котором управляющее устройство должно поддерживать заданный технологический режим.
Рассмотрим подробно функциональные элементы, входящие в управляющее устройство.
Первичный измерительный преобразователь (ПИП — чувствительный элемент, сенсор) предназначен для преобразования регулируемого параметра в сигнал измерительной информации в форме, удобной для обработки и дальнейших преобразований.
Нормирующий преобразователь (НП) служит для взаимного согласования входящих в систему управления элементов и дистанционной передачи сигналов по каналам связи.
Сигнал, соответствующий заданному значению регулируемого параметра yзд(τ) формируется задающим устройством. Величина задающего воздействия может быть постоянной или изменяться по определенному закону.
Регулятор (Р) с помощью элемента сравнения определяет отклонение текущего значения регулируемого параметра от заданного значения и формирует командный сигнал в соответствии с заложенным в нем алгоритмом регулирования. Сигнал, формируемый регулятором, по мощности не всегда достаточен, чтобы управлять ИУ, поэтому регулятор часто снабжается усилителем мощности.
Устройство автоматической системы управления, воздействующее на технологический процесс в соответствии с полученным от регулятора командным сигналом, называется исполнительным устройством (ИУ).
Исполнительный механизм (ИМ) предназначен для усиления мощности командного сигнала, получаемого от регулятора, и воздействия на регулирующий орган (РО).
Регулирующий орган (РО) — техническое средство изменения материального или энергетического потока, влияющего на регулируемую величину в ОУ.
3.11. (Соня Дмитриева)Критерии (показатели) качества регулирования.
В
системе регулирования целью является
заданное состояние объекта регулирования.
Следовательно,
точность регулирования определяется
разницей между заданным и текущим
значением регулируемого параметра, т.
е. ошибкой
(погрешностью) регулирования:
![]() .
.
Существуют несколько критерий качества регулирования
Критерии, определяющие быстродействие систем регулирования. Быстродействие можно оценивать по времени затухания переходного процесса. Время переходного процесса - продолжительность переходного процесса, охватывающего временной интервал от момента нанесения возмущающего или управляющего воздействия до достижения управляемым параметром нового установившегося значения h с заданной точностью:
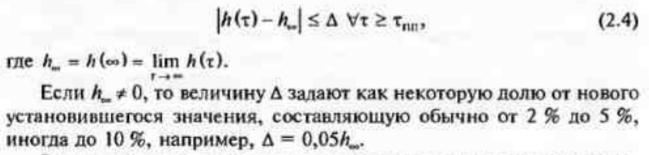 время
переходного процесса и время достижения
первого максимума, как правило, должно
быть минимальным.
время
переходного процесса и время достижения
первого максимума, как правило, должно
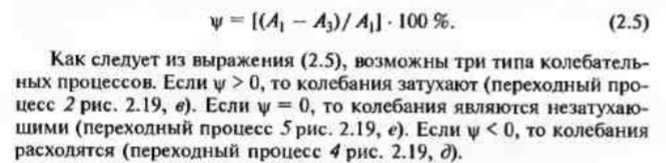
быть минимальным.Показатели, характеризующие колебательность переходного процесса, характеризуют одновременно и запас устойчивости системы, так как чем устойчивее система, тем быстрее затухают колебания в переходном процессе.
Степень затухания
- отношение разности двух соседних,
направленных в одну сторону амплитуд
А1 и А3, к первой из них А1:
Перерегулирование
и логарифмический декремент затухания: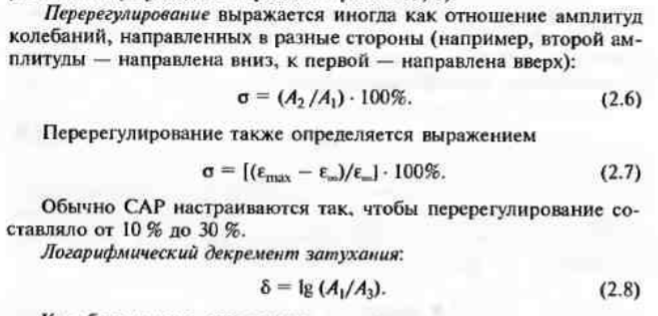
Интегральные показатели качества регулирования. Для совместной оценки точности и быстродействия систем управления используют интегральные показатели качества регулирования. Интегральный показатель качества имеет вид:
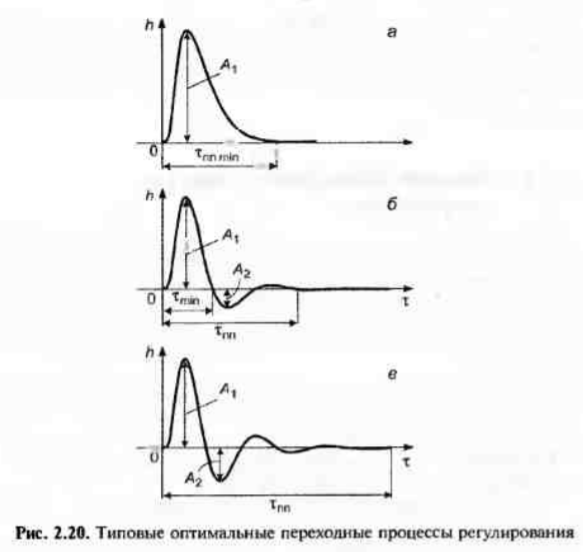
 Из
устойчивых переходных процессов в
качестве оптимального выбирают один
из трех:
Из
устойчивых переходных процессов в
качестве оптимального выбирают один
из трех:
граничный апериодический процесс с минимальным временем регулирования (рис 2.20, а)
процесс с 20-процентным перерегулированием и минимальным временем первого полупериода колебаний (рис. 2.20, б)
процесс с минимальным значением интеграла от квадрата ошибки (ИКО) (рис. 2.20, в)
3.12. (Лилия Солод)Исполнительные устройства САР.
Устройство автоматической системы управления, воздействующее на технологический процесс в соответствии с полученным от управляющего устройства командным сигналом, называется исполнительным устройством. Выходным параметром исполнительного устройства (ИУ) является расход вещества или энергии, поступающих в объект управления или выходящих из него, а входным — командный сигнал управляющего устройства.

Исполнительное устройство содержит, как правило, несколько функциональных блоков: усилитель мощности; исполнительный механизм; регулирующий орган; датчик положения; блок обратной связи; блок сигнализации крайних положений; блок ручного управления.
В зависимости от конкретных условий структура и конструкция ИУ могут существенно различаться.
По виду действия ИУ делятся на нормально открытые (НО) и нормально закрытые (НЗ). При прекращении подвода энергии, создающей перестановочные усилия, проходное сечение нормально открытого ИУ полностью открывается, нормально закрытого ИУ — полностью перекрывается.
Исполнительные устройства типа НО целесообразно применять, когда при аварийном прекращении подачи воздуха в исполнительный механизм безопасно иметь открытую технологическую линию (трубопровод). В противном случае применяют исполнительные устройства типа НЗ. Например, в ректификационной колонне на технологических линиях подачи исходного сырья и теплоносителя для его подогрева, а также на линиях отбора высококипящего и низко-кипящего компонентов ставят исполнительные устройства типа НЗ; на линиях же подачи пара в куб ректификационной колонны и орошения в верхнюю часть (укрепляющую) ректификационной колонны устанавливают исполнительные устройства типа НО. В случае аварийной ситуации ректификационная колонна работает «сама на себя». Из такого состояния ректификационную колонну легче вывести на заданный режим, чем из состояния полного ее останова.
Правильный выбор и расчет исполнительных устройств имеет первостепенное значение, поскольку погрешности в их работе непосредственно влияют на качество управления.
Основными функциональными блоками ИУ являются исполнительный механизм и регулирующий орган.