

МИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра АПУ
отчет
по практической работе №2
по дисциплине «Программирование систем реального времени»
Тема: Расчет динамики состояний системы.
Студент гр. 8391 |
|
Маликов А.А. |
Преподаватель |
|
Писарев А.С. |
Санкт-Петербург
2021
Цель работы
Расчет динамики изменения состояний системы с использованием модели марковского случайного процесса.
Задачи
1. Построить размеченный граф состояний системы S-ЭВМ по заданной матрице переходов.
2. Составить систему дифференциальных уравнений Колмогорова и решить ее методом Рунге—Кутта с использованием стандартной программы на ЭВМ при следующих условиях:
а) пределы интегрирования: нижний — 0, верхний — 50;
б) шаг интегрирования — 0,5;
в) начальные условия: P1(t) = 1, Рj = 0, j = 2, 3, ..., n;
г) результаты вывести на печать в точках 1, 5, 10, 15,…,50 с точностью Е = 10-3.
3. Получить значения вероятности безотказной работы ЭВМ Р(t) и построить график зависимости вероятности от времени.
Вариант
11 |
Исх. |
1 |
2 |
2 |
3 |
3 |
4 |
5 |
6 |
6 |
Вх. |
2 |
3 |
5 |
4 |
5 |
3 |
6 |
4 |
1 |
|
Вес |
0,9 |
0,1 |
0,8 |
0,9 |
0,2 |
0,9 |
0,5 |
0,3 |
0,9 |
Выполнение работы
Возьмем размеченный граф состояний системы S-ЭВМ из предыдущей работы (рисунок 1).
Рис. 1. Граф состояний.
Решим имеющуюся систему дифференциальных уравнений из прошлой работы методом Рунге-Кутта.
Установим пределы интегрирования и шаг интегрирования:
[t,p]=ode23(@prc1, [0:0.5:50] ,[1 0 0 0 0 0]);
, где @prc1:
function dp=prc1(t,p)
dp = zeros(6,1);
dp(1)=(0.9)*p(6)-(0.9)*p(1);
dp(2)=(0.9)*p(1)-(0.1)*p(2)-(0.8)*p(2);
dp(3)=(0.1)*p(2)+(0.9)*p(4)-(0.9)*p(3)-(0.2)*p(3);
dp(4)=(0.9)*p(3)+(0.3)*p(6)-(0.9)*p(4);
dp(5)=(0.8)*p(2)+(0.2)*p(3)-(0.5)*p(5);
dp(6)=(0.5)*p(5)-(0.9)*p(6)-(0.3)*p(6);
end
Вектор начальных условий: [1 0 0 0 0 0].
Результаты выведем на печать в точках 0, 5, 10, 15,...,50 с точностью Е =10-3:
disp(1)
p(1,1:end)
for i=5:5:50
disp(i)
p(2*i + 1,1:end)
end
t |
P1 |
P2 |
P3 |
P4 |
P5 |
P6 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
5 |
0.1455 |
0.1588 |
0.0953 |
0.1192 |
0.3366 |
0.1447 |
10 |
0.1235 |
0.1284 |
0.1593 |
0.1894 |
0.2803 |
0.1192 |
15 |
0.1113 |
0.1134 |
0.1861 |
0.2186 |
0.2609 |
0.1097 |
20 |
0.1063 |
0.1069 |
0.1973 |
0.2309 |
0.2527 |
0.1058 |
25 |
0.1043 |
0.1047 |
0.2020 |
0.2361 |
0.2490 |
0.1039 |
30 |
0.1033 |
0.1035 |
0.2043 |
0.2379 |
0.2476 |
0.1033 |
35 |
0.1030 |
0.1031 |
0.2049 |
0.2391 |
0.2470 |
0.1030 |
40 |
0.1029 |
0.1028 |
0.2049 |
0.2398 |
0.2468 |
0.1028 |
45 |
0.1028 |
0.1028 |
0.2051 |
0.2399 |
0.2467 |
0.1027 |
50 |
0.1028 |
0.1028 |
0.2054 |
0.2397 |
0.2466 |
0.1028 |
Построим графики зависимостей вероятностей от времени.
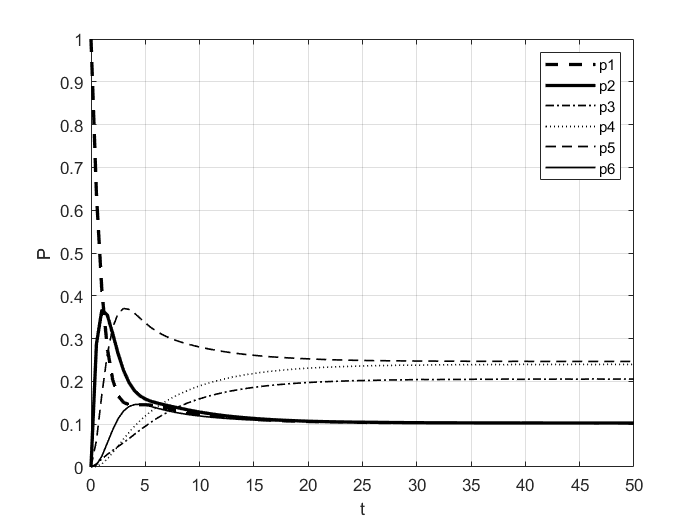
Рис. 2. Зависимости вероятностей от времени.
За
режим безотказной работы пример
 ,
тогда график примет следующий вид:
,
тогда график примет следующий вид:
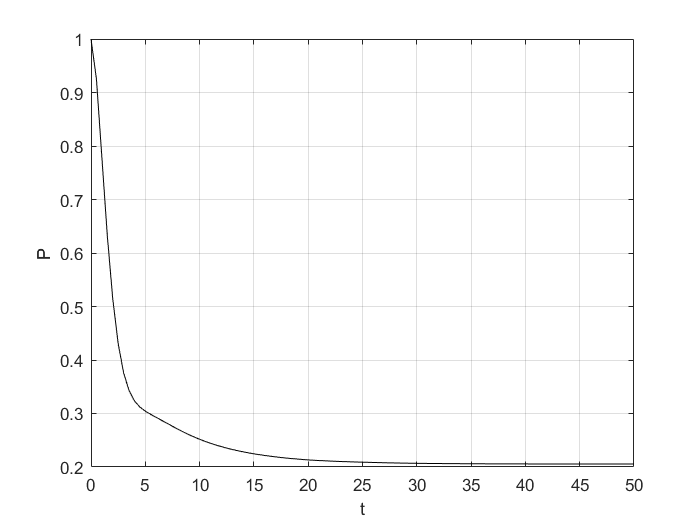
Рис. 3. Изменение вероятности работы системы в безотказном режиме во времени.
Вывод
В ходе выполнения лабораторной работы была решена система дифференциальных уравнений методом Рунге-Кутта с помощью MATLAB. Полученные предельные значения вероятностей практически не отличаются от значений, полученных в первой практической работе. Кроме того, были построены графики зависимости вероятностей от времени и изменения вероятности работы системы в безотказном режиме во времени.