

Лабы / lab2
.pdfМИНОБРНАУКИ РОССИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ «ЛЭТИ» ИМ. В. И. УЛЬЯНОВА (ЛЕНИНА)
Кафедра КСУ
ОТЧЕТ
по лабораторной работе №2
по дисциплине «Моделирование систем управления»
Тема: исследование статических режимов динамической системы
Вариант 1
Студент гр. 9491 |
Горобец А. А. |
Преподаватель |
Лукомская О. Ю. |
|
Санкт-Петербург |
2023
Цель работы.
Преобразовать исходную систему уравнений в СНЛАУ, описывающую статические режимы, рассчитать статические характеристики динамической системы с помощью языка Matlab.
Вариант лабораторной работы.
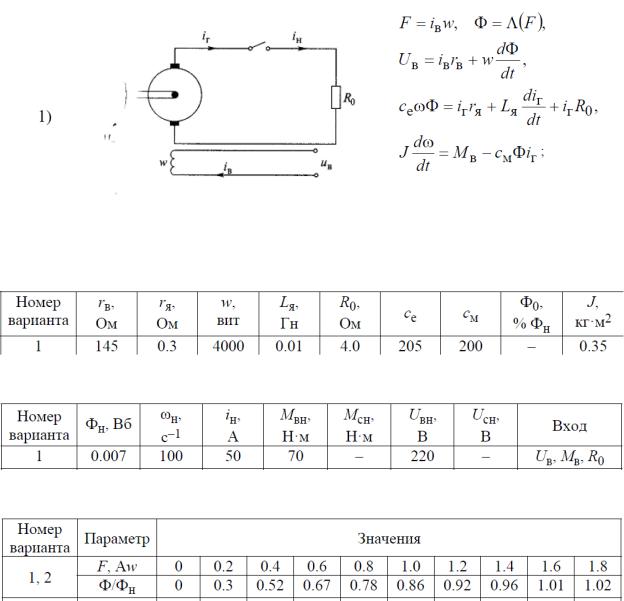
В варианте №1 используется ГПТ НВ, работающий на активную нагрузку. Его параметры приведены ниже.
Рис. 1. ГПТ НВ, работающий на активную нагрузку
Таблица 1. Параметры объекта моделирования.
Таблица 2. Входные, выходные и нормировочные переменные.
Таблица 3. Кривые намагничивания.
Постановка задачи.
Статический режим динамической системы – это ее равновесное состояние, соответствующее окончанию переходных процессов. Например, изменение напряжения возбуждения на новое постоянное значение вызывает изменение МДС, магнитного потока, тока и напряжения генератора и т.д. Переходный процесс заканчивается новыми установившимися значениями
2

этих величин, т.е. новым статическим режимом. Статический режим будет описывать система алгебраических уравнений, т.е. уравнений, куда не входят производные, так как последние в статическом режиме равны нулю.
Все статические режимы могут быть описаны СНЛАУ, записанной в обобщенной форме относительно компонент векторов и и х:
Математическая модель ГПТ НВ, работающего на активную нагрузку.
1.Запишем исходную систему уравнений, описывающую наш ГПТ НВ.
= в, Φ = Λ( )
Φв = в в +
|
|
Φ = + |
|
г |
|
+ |
|
|
|
|
|
|
|
|
|
||||
|
я |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
г я |
г |
0 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
= в − мΦг |
|
|
|
|
|
|
|
|
|
|
|||||
|
{ |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2. |
Запишем данную систему в установившемся режиме (все производные |
||||||||||||||||||
|
равны нулю). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= в, Φ = Λ( ) |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
{ |
|
|
в = в в |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Φ = |
+ |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
г я |
|
г |
0 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
0 = в − мΦг |
|
|
|
|
|
|
|
|
|
|
||||||
3. |
Выразим нашу систему через переменные состояния. |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Φ |
||||||
|
Переменные состояния в нашей модели: = |
[ 2 |
] = [ |
|
|
|
] |
||||||||||||
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
г |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
в |
||||||
|
Входные переменные в нашей модели: = [ 2] = [ |
|
] |
||||||||||||||||
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
||||||
3 0
Выразим ток нагрузки через ток якоря: н = г − в
3

Выражаем ток возбуждения через полином, найденный в лабораторной
работе №1: в = (Φ), н = г − (Φ).
В исходной системе уравнений выразим производные по переменным состояния и подставим выражения для тока нагрузки и тока возбуждения:
|
|
|
Φ |
|
= в − в в |
|
||||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
г |
= |
Φ − |
− |
|||||||
|
|
|
||||||||||
|
я |
|
|
|
|
|
г я |
|
г |
0 |
||
|
|
|
|
= в − мΦг |
|
|||||||
{ |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Φ |
|
|
|
(Φ) |
|
||||
|
|
|
|
|
= в − |
|
|
в |
|
|||
|
|
|
|
|
|
|
||||||
|
|
г |
= |
|
Φ − |
− |
||||||
|
|
|||||||||||
|
я |
|
|
|
|
|
г я |
|
г |
0 |
||
|
|
|
|
= в − мΦг |
|
|||||||
{ |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||
Приравниваем производные к нулю:
(Φ)
в − в = 0
{ Φ − г я − г 0 = 0в − мΦг = 0
Преобразуем систему уравнений:
в − (Φ) в = 0 { Φ − г я − г 0 = 0в − мΦг = 0
|
|
в |
− (Φ) = 0 |
|
|
|
|
||
|
|
|
|
|
{ |
|
в |
|
|
Φ − |
− = 0 |
|||
|
|
|
г я |
г 0 |
в − мΦг = 0
Перепишем данную систему через отнормированные параметры:
|
|
вн |
|
̅ ̅ |
|
|
|
|
в н |
в − (Ф) = 0, |
|
||
|
|
|
|
|
|
|
|
̅ |
|
̅ − |
|
̅ |
|
с Ф Ф̅ − |
̅ = 0, |
|||||
е н н |
|
|
|
гн я г |
гн 0н г 0 |
|
̅̅
{в в − Фн гнФ г̅= 0.
4
Запишем систему через переменные состояния, полученные выше: =
1 |
|
|
|
|
1 |
|
|
в |
|
|
|
|
|
|
|
|
Φ |
|
|
|
|
|
|
||||||||
[ 2 |
] = [ |
|
|
] , = [ 2] = [ |
в |
]. |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||||||||
3 |
|
|
г |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
̅ |
|
|
|
|
|
|
|
|
|
|
|
1(, ) = 11 1 − ( 1) = 0, |
|
|
|||||||
|
|
|
|
|
{2(, ) = 21 1 3 − 22 2 |
− 23 2 3 = 0, |
|
||||||||
|
|
|
|
|
3(, ) = 31 2 − 32 1 2 = 0, |
|
|
||||||||
|
Вводим коэффициенты: |
|
|
|
|
|
|
||||||||
̅( ) = 0.74795 − 0.18963 + 0.5022 ; |
= |
вн |
= 1; |
= с Ф |
|||||||||||
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
11 |
|
в н |
21 |
е н н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 143,5; 22 = гн я = 15; 23 |
= гн 0 = 200; 31 |
= в |
||||||||
|
|
|
|
|
= 70; |
= |
Ф = 70; |
|
|
|
|
|
|||
|
|
|
|
|
32 |
|
|
|
|
н гн |
|
|
|
|
|
Переписываем нашу систему уравнений:
11 1 − ̅( 1) = 0, {21 1 3 − 22 2 − 23 2 3 = 0,
31 2 − 32 1 2 = 0,
В данном случае наша система решается методом Ньютона. Для этого нам нужна следующая матрица:
Это матрица частных производных. |
|
|
|
|
|||
Заполняем матрицу: |
|
|
|
|
|
|
|
|
̅ |
|
|
0 |
0 |
|
|
|
−′( 1) |
|
|
||||
(, ) = [ |
|
|
−22 − 23 3 |
21 |
|
]. |
|
|
21 |
|
3 |
−32 1 |
1 |
||
|
− |
|
|
0 |
|
|
|
|
32 |
2 |
|
|
|
|
|
Программа для решения уравнения методом Ньютона представлена в листинге 1.
5
Листинг 1. Основная программа.
clear clc rv=145;
r_ancor=0.3; vv=4000; L_ancor=0.01; R0=4; Ce=205; Cm=200; J=0.35;
Field_n=0.007; omega=100; i_n=50; Mvn=70; Uvn=220; iv=Uvn/rv;
global a11 a21 a22 a23 a31 a32 pF a11=Uvn*vv/(rv*iv*vv); a21=Ce*omega*Field_n; a22=i_n*r_ancor;
a23=i_n*R0; a31=Mvn; a32=Cm*Field_n*i_n;
pF=[0.7479 0 -0.1896 0 0.5022 0];
length=length(1.2:-0.01:0.05);
u_1=[1.2:-0.01:0.05; ones(1,length); ones(1,length)]; x0=[1, 1, 1]';
for i=1:length
Fun(i,:)=newton('Fun_F','Fun_G', x0, u_1(:,i), 0.0001); x0=Fun(i,:)';
end
figure
subplot(2,2,1) plot(u_1(1,:),Fun(:,1)) grid minor xlabel('u_в') ylabel('Ф')
ylim([0.9*min(Fun(:,1)) 1.1*max(Fun(:,1))])
subplot(2,2,2) plot(u_1(1,:),Fun(:,2)) grid minor xlabel('u_в') ylabel('i')
ylim([0.9*min(Fun(:,2)) 1.1*max(Fun(:,2))])
subplot(2,2,3) plot(u_1(1,:),Fun(:,3)) grid minor xlabel('u_в') ylabel('\omega')
ylim([0.9*min(Fun(:,3)) 1.1*max(Fun(:,3))])
subplot(2,2,4) plot(u_1(1,:),Fun(:,1),u_1(1,:),Fun(:,2),u_1(1,:),Fun(:,3))
6
grid minor xlabel('u') ylabel('x')
legend('Ф','i','\omega','location','best') ylim([0 20])
u_1=[ones(1,length); 1.2:-0.01:0.05 ; ones(1,length)]; x0=[1, 1, 1]';
for i=1:length
Fun(i,:)=newton('Fun_F','Fun_G', x0, u_1(:,i), 0.0001); x0=Fun(i,:)';
end
figure
subplot(2,2,1) plot(u_1(2,:),Fun(:,1)) grid minor xlabel('M_в') ylabel('Ф')
ylim([0.9*min(Fun(:,1)) 1.1*max(Fun(:,1))])
subplot(2,2,2) plot(u_1(2,:),Fun(:,2)) grid minor xlabel('M_в') ylabel('i')
ylim([0.9*min(Fun(:,2)) 1.1*max(Fun(:,2))])
subplot(2,2,3) plot(u_1(2,:),Fun(:,3)) grid minor xlabel('M_в') ylabel('\omega')
ylim([0.9*min(Fun(:,3)) 1.1*max(Fun(:,3))])
subplot(2,2,4) plot(u_1(2,:),Fun(:,1),u_1(2,:),Fun(:,2),u_1(2,:),Fun(:,3)) grid minor
xlabel('u') ylabel('x')
legend('Ф','i','\omega','location','best')
u_1=[ones(1,length); ones(1,length); 1.2:-0.01:0.05 ]; x0=[1, 1, 1]';
for i=1:length
Fun(i,:)=newton('Fun_F','Fun_G', x0, u_1(:,i), 0.0001); x0=Fun(i,:)';
end
figure subplot(2,2,1)
plot(u_1(3,:),Fun(:,1)) grid minor xlabel('R_0') ylabel('Ф')
ylim([0.9*min(Fun(:,1)) 1.1*max(Fun(:,1))])
subplot(2,2,2) plot(u_1(3,:),Fun(:,2))
7
grid minor xlabel('R_0') ylabel('i')
ylim([0.9*min(Fun(:,2)) 1.1*max(Fun(:,2))])
subplot(2,2,3) plot(u_1(3,:),Fun(:,3)) grid minor xlabel('R_0') ylabel('\omega')
ylim([0.9*min(Fun(:,3)) 1.1*max(Fun(:,3))])
subplot(2,2,4) plot(u_1(3,:),Fun(:,1),u_1(3,:),Fun(:,2),u_1(3,:),Fun(:,3)) grid minor
xlabel('u') ylabel('x')
legend('Ф','i','\omega','location','best')
Листинг 2. Функция, реализующая метод Ньютона.
function [x] = newton(F, G, x0, u, e) y=feval(F, x0, u);
x=x0; while(norm(y)>e)
gr=feval(G, x, u); x=x-inv(gr)*y; y=feval(F, x, u); clc
end
Листинг 3. Функция, вычисляющая матрицу частных производных.
function G = Fun_G( x, u)
global a11 a21 a22 a23 a31 a32 pF G1=[-polyval(polyder(pF), x(1)) 0 0]; G2=[a21*x(3) -a22-a23*u(3) a21*x(1)]; G3=[-a32*x(2) -a32*x(1) 0];
G=[G1; G2; G3]; end
Листинг 4. Функция, вычисляющая значения уравнений системы.
function f= Fun_F(x, u)
global a11 a21 a22 a23 a31 a32 pF f1=a11*u(1)-polyval(pF, x(1)); f2=a21*x(1)*x(3)-a22*x(2)-a23*x(2)*u(3); f3=a31*u(2)-a32*x(1)*x(2);
f=[f1; f2; f3]; end
Статические характеристики системы представлены на рис. 1-3.
8
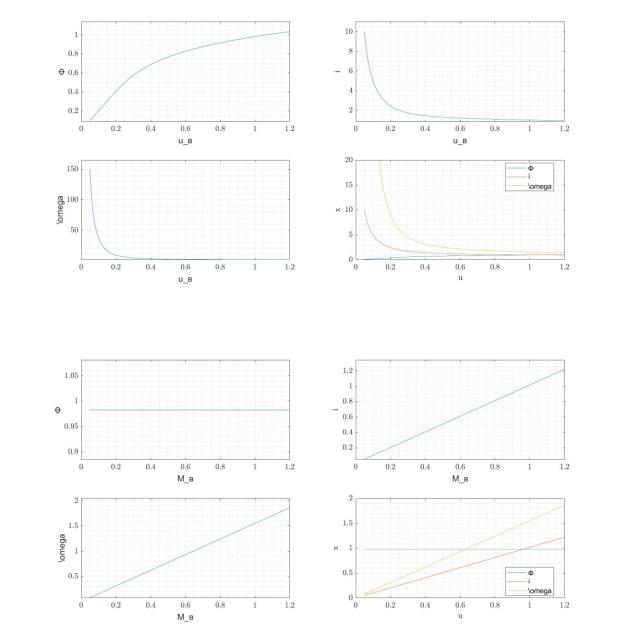
Рис. 1. Статические характеристики при изменении параметра u1 (0.05, 1.2)
Рис. 2. Статические характеристики при изменении параметра u2 (0.05, 1.2)
9
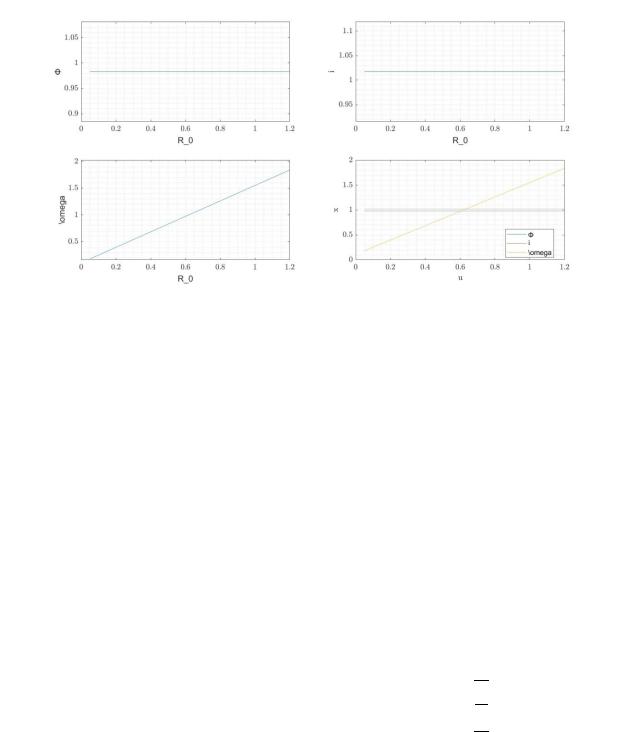
Рис. 3. Статические характеристики при изменении параметра u3 (0.05, 1.2)
Выводы.
В ходе выполнения данной лабораторной работы использовалась система уравнений СНЛАУ, описывающая статические режимы:
1( , ) = 11 1 − ̅( 1) = 0, { 2( , ) = 21 1 3 − 22 2 − 23 2 3 = 0,
3( , ) = 31 2 − 32 1 2 = 0,
В качестве функции обратной кривой намагничивания использовался нормированный полином 5-й степени, найденный в предыдущей работе:
̅( ) = 0.7479 5 − 0.1896 3 + 0.5022 .
Также с помощью Matlab были рассчитаны и построены статические характеристики нашей системы, кроме того, были найдены значения
1 Φ 0,983
переменных состояния в установившемся режиме: [ 2] = [ г] = [1,017].
3 1,55
10