

725
.pdfэтого из полюса Р проводят луч, параллельный прямой Ас = Ас( ) до пересечения с осью ординат. Штриховая прямая на рис. 7.2, параллельная оси абсцисс, и является графиком Мс =
Мс(φ).
Приращение кинетической энергии за цикл T = 0 — в соот-
ветствии с формулой (7.3). Однако в любой момент времени выполняется равенство (7.1): приращение кинетической энергии
T Aд Aс Аизб . |
(7.10) |
График избыточных работ Аизб (приращение кинетической энергии Т) строят вычитанием Ас из Ад (отрезки вдоль оси ординат между диаграммами Ад = Ад(φ) и Ас = Ас(φ)).
7.6. Диаграмма приведенных моментов инерции и энергий
Приведенный момент инерции определяют из условия равенства кинетической энергии звена приведения сумме кинетических энергий всех звеньев механизма. Для кривошип- но-ползунного механизма (см. рис. 4.6) приведенный момент инерции Iп определяют из формулы:
I 2 |
|
IS 2 22 |
|
m2 2S 2 |
|
m 2 |
|
||
ï 1 |
|
|
|
|
|
3 C |
, |
(7.11) |
|
2 |
2 |
2 |
2 |
||||||
|
|
|
|
|
|||||
Для механизма ДВС вследствие равенства кинематических параметров и масс обеих диад формула (7.11) примет вид:
I 2 |
|
2IS 2 22 |
|
2m2 2S 2 |
|
2m 2 |
||
ï 1 |
|
|
|
|
|
3 C |
|
|
2 |
2 |
2 |
2 |
|||||
|
|
|
|
|||||
I |
S 2 |
2 |
m 2 |
m 2 . |
(7.12) |
|
2 |
2 S 2 |
3 C |
|
|
Следует помнить, что полный момент инерции механизма |
|||||
Iп складывается из момента инерции маховика IM |
и приве- |
||||
денного момента инерции Iп |
всех звеньев, кроме начального. |
||||
Величина Iп — переменная; величина IM — постоянная, она включает в себя собственно момент инерции звена 1 (кривоши-
119

па и других связанных с ним элементов, например, зубчатого колеса) и момент инерции маховика, значительно превышаю-
щий другие слагаемые. Диаграмму Iï Iï строят в масштабе I , мм/(кг∙м2):
I I ï max / Iï max , (7.13)
где I ï max — отрезок, изображающий максимальную величину приведенного момента инерции, мм.
Диаграмму Iï Iï строят из расчетов по формуле 7.12 либо по компьютерным распечаткам. Диаграмма Iï Iï с началом координат в точке О (рис. 7.2) одновременно является диаграммой TII ÒII кинетической энергии всех звеньев, кроме звена приведения. Это следует из выражения:
|
|
|
T |
I |
2 |
|
|
|
|
|
п |
1 |
, |
(7.14) |
|
|
|
|
|
|
|||
|
|
|
II |
2 |
|
|
|
|
|
|
|
|
|
||
где |
2 |
|
/ 2 — постоянная величина. |
|
|||
1 2 |
|
||||||
|
2 |
1.ñð |
|
|
|
|
|
|
|
|
|
|
|
|
|
Масштаб диаграммы кинетической энергии всех звеньев, кроме начального в мм/Дж, определяют по формуле:
Ò I 2 / 12 . |
(7.15) |
Если исключить постоянную составляющую диаграммы TII ÒII , т.е. поднять ось абсцисс до точки М, соответствующей минимальной кинетической энергии TII , то в новой системе координат с началом в точке М появляется диаграмма TII TII в масштабе Ò (рис. 7.2).
Таким образом, одна и та же кривая изображает диаграм-
му |
IÏ IÏ |
|
в масштабе I и диаграммы TII TII и |
TII |
TII |
|
в масштабе Ò . Распечатка табл. 11 компью- |
терной программы ТММ-1, содержащей работу, энергии и моменты инерции, приведена на рис. 7.4.
120

7.7. Определение момента инерции маховика методом Н.И. Мерцалова
Кинетическая энергия Т всех подвижных звеньев состоит из слагаемых:
T TI TII ,
где TI — кинетическая энергия начального звена (в основном маховика), Дж; TII — кинетическая энергия всех звеньев,
кроме начального.
При динамическом синтезе удобно пользоваться зависи-
мостью приращения кинетических энергий — формула (7.4),
из которой находят:
TI |
T TII , |
(7.16) |
где TI — приращение кинетической энергии начального звена (маховика).
Рис. 7.4
Выражение (7.16) составляет основу метода Мерцалова. Для определения момента инерции маховика необходимо иметь диаграмму приращения кинетической энергии маховика. Данные для ее построения получены в пп. 7.5 (ΔТ) и 7.6 (ΔТII).
121

Известно, что угловая скорость кривошипа 1 колеблется внутри цикла между значениями 1min и 1max. Следовательно, изменяется и кинетическая энергия звена приведения в
пределах от T |
I |
|
2 |
|
/ 2 до |
T |
I |
|
2 |
|
/ 2 . Наиболь- |
|||||||||
|
1min |
|
М 1min |
|
|
|
|
1max |
|
|
М 1max |
|
|
|
||||||
ший перепад кинетической энергии маховика |
|
|
|
|
||||||||||||||||
|
T1нб T1max |
T1min |
|
IМ |
1max2 |
1min2 |
|
|
||||||||||||
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
Iм |
|
|
|
|
|
|
|
|
|
|
ср |
I |
2 |
, |
|||||
2 |
|
|
|
|
|
|
||||||||||||||
|
|
1max |
1min |
|
1max |
|
1min |
|
|
|
|
м ср |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср |
|
|
|
|
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IМ T1нб / ср2 |
. |
|
|
|
|
(7.17) |
|||||||||
Для определения отрезка на диаграмме, изображающего величину T1í á (см. рис. 7.2), по касательным к диаграмме
T1 =
= T1 ( ) в точках наибольшего максимума и наименьшего
минимума проводят две горизонтальные прямые до пересечения с осью ординат в точках А и Б. Отрезок АБ соответствует наибольшему перепаду кинетической энергии, который должен взять на себя маховик. Величина наибольшего перепада кинетической энергии маховика
T1í á ÀÁ / À .
В окончательном виде формула (7.17) примет вид: |
|
|||||||
|
|
|
|
|
|
|
|
|
I |
ì |
ÀÁ /( |
2 ) . |
(7.18) |
||||
|
|
|
|
|
|
À 1ñð |
|
|
Диаграмму TI = TI |
( ) строят на диаграмме T = T ( ) |
|||||||
путем вычитания из T |
величины TII . Так как T |
и TII |
||||||
построены в разных масштабах, для их согласования ординаты |
||||||||
диаграммы TII = TII ( ) умножают на отношение масштабов. |
||||||||
Для получения результата из ординат диаграммы T = |
T ( ) |
|||||||
|
|
|
|
|||||
следует вычитать отрезки |
TII , умноженные на отношение |
|||||||
масштабов: |
|
|
|
|
|
|
|
|
122
|
|
|
|
|
|
|
|
T1 T TII A / T . |
(7.19) |
||||||
В выражении (7.19) второе слагаемое всегда отрицатель- |
|||||||
ное, поэтому диаграмма T1 |
= T1 ( ) будет всегда располо- |
||||||
жена ниже диаграммы T = |
T ( ) (рис. 7.2). |
|
|||||
7.8. Алгоритм расчета момента инерции маховика
Расчет момента инерции маховика представляет собой решение задачи динамического синтеза механизма.
1. Строят индикаторные диаграммы p = p(φ), развернутые на один оборот кривошипа, для двигателей и компрессоров либо
диаграмму сил сопротивления FC FC для технологических
машин. Для механизмов двигателей и компрессоров на полном обороте кривошипа строят две индикаторные диаграммы — для обоих цилиндров.
2. Определяют приведенные моменты сил M ï из условия
|
ï 1 |
n |
|
равенства мощностей M |
Pi |
и строят диаграмму |
|
|
|
i 1 |
|
Mï |
Mï в масштабах ì и |
. |
|
|
|||
|
3. |
Методом графического |
интегрирования диаграммы |
||||
Mï |
Mï строят диаграмму |
AC AC |
для технологиче- |
||||
ских машин и AÄ AÄ для двигателей. |
|
||||||
|
4. |
Соединением начала и конца диаграммы работ прямой |
|||||
получают |
диаграмму |
AC AC |
для |
двигателей и |
|||
AÄ AÄ для технологических машин. |
|
||||||
|
5. |
Строят диаграмму |
Aèçá T AÄ AC T в мас- |
||||
штабе A |
путем вычитания отрезков AC |
из AÄ . |
|||||
|
6. |
Определяют приведенный момент инерции Iп из условия |
|||||
|
|
|
|
|
|
n |
|
равенства кинетических энергий Iï 12 / 2 Ti и строят диа- |
|||||||
|
|
|
|
|
|
i 1 |
|
грамму Iï |
Iï в масштабе μI. |
|
|
||||
123

7. Диаграмма Iï Iï в масштабе μI с началом координат в точке О одновременно является диаграммой кинетической энергии всех звеньев, кроме начального, TII TII в масштабе T .
8. От точки М наименьшей кинетической энергии TII про-
водят новую ось абсцисс. В новой системе координат с центром в точке М образуется диаграмма приращения кинетической энергии ТII = TII (φ).
9. Для определения момента инерции маховика IМ по методу Мерцалова строят диаграмму TI T TII TI
путем вычитания из отрезков T отрезков, изображающихTII , помноженных на отношение масштабов.
10. Из точек наибольшего максимума и наименьшего минимума проводят линии, параллельные оси абсцисс, до пере-
сечения с осью ординат в точках А и Б. Величина ÀÁ / À
дает наибольший перепад приращения кинетической энергии звена приведения, который должен взять на себя маховик, а
момент инерции маховика равен Iì ÀÁ / À 1ñð2 .
7.9.Определение угловых скоростей
иугловых ускорений звена приведения
Диаграмма T1 |
= T1 ( ) одновременно |
является диа- |
|
граммой изменения |
угловой скорости 1 |
1 |
(рис. |
7.2). Масштаб угловой скорости в мм с: |
|
|
|
|
A Iì 1ñð . |
|
(7.20) |
Линию средней угловой скорости проводят от середины отрезка АБ параллельно оси абсцисс. Начало координат тахо-
граммы 1 1 не показывают, так как оно выходит за
пределы чертежа. Фактическая угловая скорость для любого положения:
|
|
|
|
1 1ñð 1 / , |
(7.21) |
||
124

где 1 — отрезок, измеряемый от средней линии диаграм-
мы 1 1 .
Для заданного положения кривошипа необходимо рассчитать величину угловой скорости кривошипа.
Определение закона изменения скорости звена по задан-
ной нагрузке составляет задачу динамического анализа. Из рассмотренного следует, что изначальная посылка кинематического анализа о постоянной угловой скорости кривошипа не соответствует действительности. Колебания угловой ско-
рости приводят к появлению углового ускорения и динамиче-
ских нагрузок. |
|
|
Графическим |
дифференцированием |
диаграммы |
1 1 получают диаграмму углового ускорения кривошипа 1 1 . Метод графического дифференцирования рас-
смотрен в разделе 4. Для построения диаграммы угловых ускорений по методу хорд на каждом участке диаграммы
1 1 кривые заменяют хордами. Параллельно им из
полюса дифференцирования P2, отложенного на отрезке дифференцирования Н2 (40…60 мм), проводят лучи до пересечения с осью ординат. Полученные ординаты откладывают на серединах участков и соединяют плавной кривой (рис. 7.2). Масштаб диаграммы угловых ускорений по методу графического дифференцирования в мм·с2:
|
|
H |
2 |
. |
(7.22) |
|
t |
|
|
||
|
|
|
|
|
Масштаб времени определяют по формуле (4.19). По диаграмме 1 1 (рис. 7.2) величины угловых ускорений
определяют делением длин отрезков на масштаб. Известная величина 1 позволяет рассчитать динамический момент, обусловленный неравномерностью вращения:
М дин М и Iм 1 . |
(7.23) |
125
Его относительную величину можно рассчитать, поделив динамический момент на приведенный момент: Ì äèí / Ì ï .
Студенту необходимо выполнить данные расчеты для заданного положения кривошипа. Таким образом, угловое ускоре-
ние кривошипа не равно нулю. Угловое ускорение начального звена является переменным по величине и направлению.
Определение угловых скоростей и угловых ускорений начального звена является задачей динамического анализа механизма.
7.10. Конструирование маховика
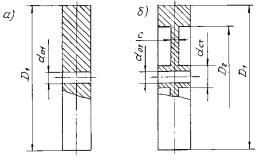
Маховики проектируют в двух конструктивных формах: стальной диск при диаметре D1 < 300 мм (рис. 7.5, а) или чугунная конструкция с ободом, диском или спицами и ступицей (рис. 7.5, б). Момент инерции стального диска:
|
R2 |
|
D2 |
|
|
D4 |
|
D5 |
b |
|
|
Iì ,ñ mc |
1 |
m |
1 |
|
|
1 |
b |
1 |
, |
(7.24) |
|
2 |
8 |
32 |
32 |
|
|||||||
|
|
|
|
|
|
|
|
где mс — масса маховика; b — коэффициент ширины маховика, b b / D1 ; b — ширина маховика, м; — плотность, кг/м3, D1 — максимальный диаметр, м.
Рис. 7.5
Диаметр стального маховика, необходимый для назначения той или иной конструкции:
126

D1 |
|
5 |
32I |
ì .ñ. |
|
. |
(7.25) |
|
b |
||||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
Для оптимизации маховика по габаритам и массе реко-
мендуется принимать несколько значений b из ряда: 0,05;
0,1; 0,15; 0,2; 0,25; 0,3. Для стальных маховиков плотность = 7800 кг/м3, для чугунных — = 7100 кг/м3. В чугунной литой конструкции предполагается, что необходимый момент инерции маховика обеспечивается массой обода, а масса ступицы и спиц составляет 20 % от массы обода. Момент инерции обода маховика:
|
|
|
D5 |
1 4 |
|
|
|
||||
I |
|
D |
|
, |
(7.26) |
||||||
мч |
|
|
|||||||||
|
|
|
b |
1 |
32 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
D1 |
5 |
|
32Iì ÷ |
. |
(7.27) |
||||||
b 1 4D |
|||||||||||
|
|
|
|
|
|
|
|||||
В формулах (7.26) и (7.27):
ψD — коэффициент диаметра, который рекомендуется принимать из ряда 0,6; 0,7; 0,8.
ψD = D2/D1, |
(7.28) |
где D2 — внутренний диаметр обода. |
|
D2 D D1 . |
(7.29) |
Ширину обода определяют из формулы: |
|
b b D1 . |
(7.30) |
Все принятые размеры необходимо округлять до стан- |
|
дартного значения. Масса чугунного маховика, кг: |
|
m 1,2 |
D2 |
D2 |
|
|
1 |
2 |
b . |
(7.31) |
|
|
|
|||
÷ |
|
4 |
|
|
|
|
|
|
|
Диаметр отверстия ступицы принимают равным диаметру коренной шейки d01. Диаметр ступицы dст = 1,8 d01, толщина спицы или диска c = 0,25b. Расчетные размеры D1, b, dст, c
127

округляют по стандарту в большую сторону, D2 — в меньшую.
Расчеты по формулам (7.24)…(7.31) следует выполнить на ЭВМ с помощью программы ТММ-16 в системе Quick BASIC. Цель расчетов: определение размеров маховика по его моменту инерции с оптимизацией по массе при ограничении по габари-
там (D1).
Пример 7.2. Рассчитать параметры чугунного маховика
(D1, D2, b, mч, Iмч) по программе ТММ-16, если момент инерции маховика Iмч = 6,5 кг∙м2.
Решение:
Принимаем последовательно коэффициенты ψb = 0,1; 0,15; 0,2 и ψD = 0,6; 0,7; 0,8. Компьютерная распечатка содержит 9 вариантов расчетов (рис. 7.6).
Рис. 7.6
Выводы:
1. Задавая ограничение по диаметру (D1 ≤ 600 мм), из оставшихся 5 вариантов выбираем вариант с наименьшей массой и с моментом инерции Iмч ≥ 6,5 кг∙м2: D1 = 600 мм; D2
=360 мм; b = 90 мм; mч = 115,6 кг; Iм = 7, 08 кг∙м2.
2.С увеличением отношения b/D масса маховика увеличивается.
3.С увеличением D2/D1 масса маховика уменьшается.
Содержание второго листа курсового проекта
На листе формата А2 размещают:
– индикаторную диаграмму в масштабе μp, мм/МПа либо диаграмму сил сопротивления в масштабе μF, мм/кН;
128