

679
.pdfфильтрации параметры, представленные на рис. 7.3, для литых деталей тележки грузовых вагонов. Эти параметры могут быть и другими. Все их значения приводятся в технологических инструкциях, а назначение этих параметров представлено в табл. 7.1;
Рис. 7.3. Отображение режима настройки обработки сигналов: в окнах настройки указаны параметры, используемые для контроля литых деталей тележек грузовых вагонов
д) далее включается контрольный режим «Измерение шумов». Запись данных в этом режиме производится в течение 10 или более секунд. В результате этого, если количество принятых сигналов составляет 0,2 сигн./с и менее, уровень шумов признается удовлетворительным иможнопроводить контроль. В противном случае следует устранить источники шума. Для чего в сохраненном файле надо войти в режим «Форма» и определить природу сигналов (см. прил. А). После этого устраняется причина в соответствии с указаниями табл. 7.2;
101

Таблица 7.1
Назначение параметров настройки обработки результатов АЭ контроля системы СЦАД 16.02
Название |
|
|
|
параметра, |
Назначение и смысл |
Значение |
|
единица |
параметра |
||
|
|||
измерения |
|
|
|
Метод локации |
Метод определения координат источника (см. гл. 6) |
Аналитиче- |
|
|
|
ский |
|
Определение |
Способ определения времени прихода сигналов на |
По оцифровке, |
|
времени |
каждый датчик |
порог автома- |
|
прихода |
тический |
||
|
|||
Порог шума, |
Максимально допустимое количество шумовых |
0,2 |
|
с–1 |
сигналов в секунду |
||
|
Величина интервала времени до момента |
|
|
|
превышения порога сигналом, записанным первым |
|
|
|
из датчиков пьезоантенны, который необходимо |
|
|
Время |
записывать для всех каналов зоны. Это время |
|
|
предыстории, |
важно потому, что если система ошибется при |
300 |
|
мкс |
определении момента прихода сигнала на любой из |
|
|
|
датчиков, у оператора будет возможность |
|
|
|
исправить это значение в обоих направлениях |
|
|
|
временной шкалы |
|
|
Размер окна, |
Величина горизонтальной развертки шкалы |
1000 |
|
мкс |
времени каждого канала |
|
|
Амплитуда |
Фильтрация по размаху амплитуды выполняется по |
По первому |
|
сигнала, мВ |
значению первого из принявших сигнал датчиков |
принявшему |
|
|
|
датчику |
|
|
Амплитудный порог для первого из датчиков, |
|
|
Амплитудный |
зарегистрировавшего локализованный сигнал, ниже |
250 |
|
порог, мВ |
которого сигналы игнорируются и не участвуют в |
||
|
|||
|
оценке дефектности детали |
|
|
|
Порог значения частоты по амплитудному |
|
|
|
максимуму на графике АЧХ, сигналы, имеющие |
|
|
Частотный |
максимум ниже этого значения для первого |
100 |
|
порог, кГц |
зарегистрировавшего сигнал датчика, |
||
|
|||
|
игнорируются и не участвуют в оценке |
|
|
|
дефектности |
|
|
Порог |
Сигналы, время нарастания которых на первом |
|
|
длительности |
|
||
принявшем его приемнике больше установленного |
300 |
||
переднего |
значения, игнорируются при локализации |
|
|
фронта, мкс |
|
||
Приоритет |
Системе необходимо задать приоритетную команду |
Инициализа- |
|
выбора либо ожидания следующего сигнала, либо |
ция плат |
||
|
уже принятого запоминания на жестком диске |
||
|
|
||
Отображение |
Устанавливаются три уровня цветового |
Устанавлива- |
|
локализован- |
отображения сигналов в режиме локализации при |
ются каждым |
|
ных событий |
записи и обработке результатов контроля. Этот |
оператором |
|
|
раздел используется для удобства оператора. По |
удобные для |
|
|
настроенным значениям он может в режиме |
него значения |
|
|
локализации наблюдать сигналы с наибольшей |
|
|
|
амплитудой |
|
102

|
Окончание табл. 7.1 |
||
|
|
|
|
Название |
|
|
|
параметра, |
Назначение и смысл |
Значение |
|
единица |
параметра |
||
|
|||
измерения |
|
|
|
Программный |
Автоуправление файлами позволяет сортировать |
|
|
файлы в автоматически создаваемые папки с |
|
||
интерфейс |
номерами объектов в заданные директории и затем |
Активирован |
|
пользователя |
их легко находить в процессе обработки |
|
|
|
|
||
е) затемпроводятоценкууровнячувствительностиустановленных датчиков. Для этого надо включить внешний имитатор
врежиме излучения сигналов с амплитудой 100 В с частотой следования 1 Гц (для деталей железнодорожного транспорта, за исключением котлов цистерн, для которых частота должна быть 0,5 Гц). Если имитатор внутренний, т. е. встроенный в системный блок, то эти параметры в зависимости от выбранного объекта контроля устанавливаются автоматически;
ж) включают режим «Имитатор» и записывают результаты
втечение 5…10 с. Затем результаты сохраняют и в режиме «Форма» оценивают величину размаха амплитуды, которая для близких к имитатору ПАЭ должна быть выше 1000 мВ. Для крупногабаритных деталей, таких как боковые рамы, надрессорные балки, котлы цистерн, на остальных ПАЭ максимальная амплитуда должна быть больше 300 мВ, а для деталей меньших размеров все принимаемые сигналы должны иметь размах более 1000 мВ;
з) если какой-либо из датчиков не соответствует требованиям по чувствительности, то его следует переустановить, добавив контактной смазки, так, чтобы он стоял более ровно и надежно. Если вы заметили, что низкий уровень имеют многие преобразователи, то причиной может быть некачественный контакт датчика имитатора;
и) в случае неисправности имитатора, датчика имитатора или его отсутствия имитационные сигналы получают изломом графитового стержня твердостью НВ и диаметром 0,5 мм автоматического карандаша. Излом совершается на поверхности контролируемой детали в приблизительном центре пьезоантенны каждой платы. Излом осуществляют при положении
103

карандаша около 45° наклона к поверхности изделия. Стержень выдвигается на 3…4 мм, полученные сигналы должны превышать уровень размаха амплитуды в 1000 В;
к) перед нагружением детали внешний имитатор отключается.
Таблица 7.2
Типы шумовых сигналов и способы уменьшения их потока
Тип сигнала |
Причина его появления |
Способ устранения |
|
шума |
|
|
|
|
Отсутствие заземления системы |
Заземлить оборудование. |
|
|
или нагружающего устройства. |
Установить качественный |
|
Электромагнит- |
Отсутствие качественного |
фильтр. Можно немного |
|
сетевого фильтра, |
повысить уровень порога |
||
ные помехи |
|||
пропускающего перепады |
срабатывания каналов |
||
(рис. А1, А.2) |
|||
напряжения, возникающие во |
системы в режиме настройки |
||
|
|||
|
внешней сети, например в |
плат, но не более чем на 20 |
|
|
процессе сварки |
единиц |
|
|
Влияние вибраций, |
|
|
Непрерывный |
возникающих в процессе работы |
|
|
различных машин или |
Изоляция фундамента |
||
низкочастотный |
|||
механизмов в помещении. Это |
нагружающего устройства. |
||
шум |
|||
повышает уровень шума. |
Заменить датчик |
||
(рис. А.3) |
|||
Если такая помеха в одном |
|
||
|
|
||
|
канале, то датчик неисправен |
|
|
|
|
Если такой сигнал |
|
|
Высокая длительность |
локализован, его следует |
|
«Хвост» сигнала |
исключить из локализации, |
||
некоторых акустических |
|||
(рис. А.4) |
сигналов |
установив в этом режиме |
|
|
обработки в окне |
||
|
|
||
|
|
«Локализация» цифру 0 |
|
|
|
Если на каком-либо из каналов |
|
|
|
или нескольких каналах |
|
|
Наложение акустического |
зафиксированные времена |
|
Электромагнитная |
прихода неточны, надо |
||
сигнала от источника и помеха в |
|||
помеха |
изменить времена прихода, |
||
(рис. А.5) |
одном окне |
перенеся точку регистрации в |
|
|
|
точки истинного приема |
|
|
|
акустического сигнала |
|
Непрерывный |
Обрыв одного из контактных |
Припаять контакты, если |
|
проводов соединительного |
разрыв случился в месте |
||
электрический |
|||
кабеля. Случается чаще всего в |
паяного соединения, или |
||
сигнал с |
|||
месте выхода кабеля из датчика, |
заменить кабель на целый, или |
||
максимальной |
|||
реже — в других местах. |
заменить датчик на целый. |
||
амплитудой |
|||
Неисправен предварительный |
Заменить предварительный |
||
(рис. А6) |
|||
усилитель |
усилитель |
||
|
104
7.3. Проведение акустико-эмиссионныхиспытаний
Сначала включают маслонасоснуюстанцию и подают давление в нагружающее устройство, затем нагружают деталь. В момент, когда стрелка манометра сдвигается с нуля, но не превышает давления в 20 кг/см2, запускают АЭ систему в режиме, соответствующем типу нагрузки.
После достижения максимальной нагрузки она выдерживается с записью в течение 10…15 с. Затем АЭ система выключается, и только после этого сбрасывается нагрузка.
Вслучае необходимости производят такую же запись для другого вида нагружения или осуществляют повторную нагрузку (если она предусмотрена технической инструкцией).
Нагружение объекта контроля следует экстренно прекратить в случае появления каких-либо стуков, шумов, исходящих от него в процессе нагружения, или если в какой-то зоне контроля резко увеличивается поток отображаемых записанных сигналов АЭ.
Вконце испытаний записывается номер детали для создания директории в файловом меню системы.
7.4.Оценка и оформление результатов контроля
Врежиме обработки изначально отображается панель локализации источников на детали (рис. 7.4).
Вэтом режиме сначала оценивается количество значимых сигналовАЭипредварительная дефектность детали.Для этого нажимаем кнопку «Предварительный диагноз» и в любом случае переносим курсор фильтра диагностического признака последовательно на цифры 1 и 2. Следует пояснить, что в режиме 0 отображаются все локализованные сигналы АЭ, в том числе возникшие от воздействия захватов нагружающего устройства, трения детали об опоры, единичные сигналы и, возможно, неправильно локализованные из-за наложения нескольких сигналов или невысокого уровня размаха амплитуды. Переключение в режим 1 позволяет отсеять часть малоинформативных сигналов с точкизрения оценки развития дефектов в локальных областях. В режиме 2 отображаются только сигналы, по которым деталь бракуется АЭ системой (индикатор «Брак» загорается красным цветом).
105
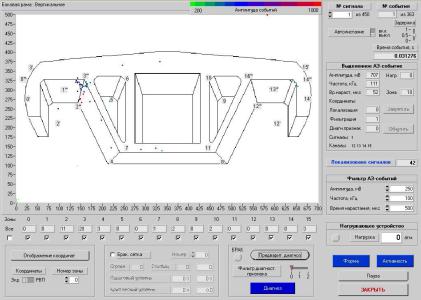
Рис. 7.4. Режим локализованных источников АЭ на объекте контроля (на примере боковой рамы грузового вагона)
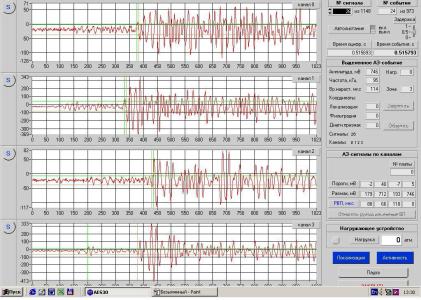
Проведя сортировку сигналов, осуществляют их просмотр в режиме «Форма». После этого проверяют правильность их локализации системой, например, таким значимым (на уровне 1 и 2) сигналом, который представлен на рис. 7.5. Время прихода этого сигнала на канал 3 определено с ошибкой, по «быстрой» волне, а на остальных каналах — по «медленной». Это приводит к ошибке определения координат источника сигнала при автоматической локализации системой, поэтому данное время прихода на ПАЭ следует скорректировать, установив значение равным 375 мкс (см. рис. 7.5). Это повлечет за собой изменение координат источника и может повлиять на его оценку АЭ системой.
После обработки сигналов с коррекцией времен прихода там, где это требуется, в режиме «Локализация» следует установить фильтр диагностического признака на значение 0. Затем вновь активируется обработка «Предварительный диагноз». Место на детали, на котором наблюдается скопление сигналов АЭ, надо тщательно осмотреть визуально. Кроме
106
того, данное место на детали необходимо проконтролировать другими методами и средствами неразрушающего контроля (например, феррозондовым или магнитопорошковым). По результатам контроля выносится решение о годности детали к работе.
Рис. 7.5. Представление одного из сигналов в режиме «Форма»
Протокол результатов оформляется в режиме «Диагноз»
(рис. 7.6).
При этом система автоматически выдает один из видов диагноза: «Брак», «Дополнительный контроль», «Годен». Оператор записывает данные о детали (заводской номер, номер завода,год изготовления),фамилию илисвой код,а при необходимости комментарии по результатам натурного осмотра участков детали или дополнительного неразрушающего контроля.
В случае браковки детали необходимость просматривать другой вид нагружения объекта контроля отпадает. Если деталь является годной, то точно так же необходимо оценить ее состояние при другом или повторном нагружении.
107
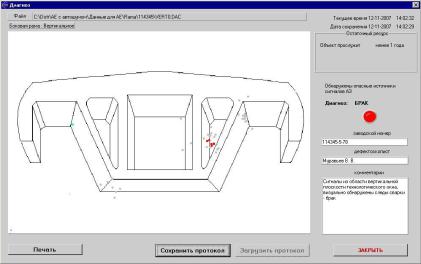
Рис. 7.6. Отображение режима «Диагноз» с оформленным протоколом результатов контроля
При браковке сохраняют протоколы диагноза, в которых зарегистрированы один или несколько дефектов, а в случае отсутствия опасных дефектов можно сохранить один из протоколов, как правило, наиболее информативный.
Контрольные вопросы
1.Какие подготовительные операции должны быть проделаны с объектом контроля?
2.Зачем приемные каналы АЭ должны иметь нумерацию?
3.Что произойдет, если перепутать местами датчики двух разных каналов при их установке на деталь?
4.Какие операции требуется выполнить в режиме настройки плат?
5.Объясните, зачем проводится калибровка чувствительности с применением имитатора сигналов АЭ?
6.Поясните назначение критериев фильтрации сигналов АЭ.
7.Какие неисправности могут быть выявлены в ходе настройки АЭ системы? Каким образом эти неисправности можно устранить?
8.Когда включают и когда отключают запись результатов АЭ контроля?
108
9.Какая информация о результатах контроля отображается
врежиме «Локализация»?
10.Объясните,зачемпроводитсяпросмотрзначимых сигналов АЭ в режиме «Форма»?
11.Какие сведения указываются в протоколе результатов АЭ контроля?
ЗАКЛЮЧЕНИЕ
Акустико-эмиссионный контроль получает все более широкое распространение в нашей стране. К числу достоинств метода следует отнести его интегральность, возможность определения координат дефекта в реальном времени, автоматизацию процесса измерения, оценки результатов. Кроме того, слабое влияние пространственного расположения объекта и качества его поверхности на результаты контроля, возможность определения степени опасности. Эти факторы обусловили его применение вомногих отраслях промышленности, в том числе и на железной дороге.
Эксплуатация акустико-эмиссионных комплексов и систем, даже при полной автоматизации всех операций контроля, требует соответствующих знаний и навыков по нескольким дисциплинам. Рассмотренная в данном учебном пособии информация может быть в дальнейшем расширена при изучении научно-технической литературы по акустико-эмиссионному контролю [5, 8, 9, 10]. Механизмы деформирования и разрушения материалов подробно проанализированы в монографи-
ях [11,12, 13].
Литература
1.Герасимов В.Г., Покровский А.Д., Сухоруков В.В. Неразрушающий контроль: В 5 кн. Кн. 3. Электромагнитный контроль: Практич. пособие / Под ред. В.В. Сухорукова. М.: Высш. шк., 1992. 312 с.
2.Ермолов И.Н., Ланге Ю.В. Неразрушающий контроль: Справочник:
В7 т. / Под. общ. ред. В.В. Клюева. Т. 3. Ультразвуковой контроль. М.: Машиностроение, 2004. 864 с.
3.Акустическая эмиссия и ее применение для неразрушающего контроля в атомной энергетике/ Под ред. К.В. Вакара. М.: Атомиздат, 1980. 211 с.
4.Акустико-эмиссионная диагностика конструкций / А.Н. Серьезнов, В.В. Муравьев и др.; Под. ред. Л.Н. Степановой. М.: Радио и связь, 2000. 280 с.
109
5.Диагностика объектов транспорта методом акустической эмиссии / А.Н. Серьезнов, Л.Н. Степанова, В.В. Муравьев и др.; Под ред. Л.Н. Степановой, В.В. Муравьева. М.: Машиностроение, 2004. 368 с.
6.ГОСТ 27655–88. Акустическая эмиссия. Термины, определения и обозначения. М.: Изд-во стандартов, 1997. 11 с.
7.Система неразрушающего контроля. Метод акустической эмиссии: Сб. документов. Сер. 28. Вып. 2/ Колл. авт. М.: Государственное унитарное предприятие «Научно-технический центр по безопасности и промышленности Госгортехнадзора России», 2001. 220 с.
8.Грешников В.А., Дробот Ю.Б. Акустическая эмиссия. Применение для испытания материалов и изделий. М.: Изд-во стандартов, 1976. 272 с.
9.Неразрушающий контроль: Справочник: В 7 т. / Под ред. В.В. Клюева. Т. 7: В 2 кн. Кн. 1: В.И. Иванов, И.Э. Власов. Метод акустической эмиссии. Кн. 2: Вибродиагностика / Ф.Я. Балицкий, А.В. Барков, Н.А. Баркова и др. М.: Машиностроение, 2005.
10.Трипалин А.С., Буйло С.И. Акустическая эмиссия. Физико-механи- ческие аспекты. Ростов н/Д, 1996. 160 с.
11.Нотт Дж. Ф. Основы механики разрушения. М.: Металлургия, 1978. 256 с.
12.Финкель В.М. Физика разрушения. М.: Металлургия, 1970. 376 с.
13.Трощенко В.Т. Усталость и неупругость металлов. Киев: Наукова думка, 1971. 268 с.
110