

2832
.pdfРис. 4. Виды механических характеристик
1. Характеристика, не зависящая от скорости , момент М с не
зависит от скорости. Подъемные краны, лебедки, конвейер или рольганг с постоянной массой передвигаемого материала.
2. |
Характеристика |
линейно возрастающая |
x |
1, |
М с |
- |
линейно зависит от w . |
Характерна для привода |
генератора |
||||
постоянного тока, работающего на постоянную внешнюю нагрузку. |
|
|||||
3. Характеристика нелинейно-возрастающая x |
1, |
|
|
|
||
М с зависит от квадрата w . Вентиляторы, центробежные насосы. |
|
|||||
4. |
Характеристика |
нелинейно-спадающая |
x |
1, |
М с |
- |
обратно пропорциональна w .
Наматывающие устройства при резке ленты на дисковых ножницах, металлорежущие станки.
Для кривошипных прессов механическая характеристика меняется в процессе выполнения технологического цикла и состоит из нескольких типовых участков (рис. 5).
Рис. 5 Механическая характеристика кривошипного пресса
11

На участках холостых ходов характеристика x 0 не зависит от скорости. На участках включения муфты x 2 характеристика нелинейно возрастает, так как расход энергии на включение муфты
Ам Yв.ш.  w2 .
w2 .
На участке рабочего хода механическая характеристика определяется видом выполняемой операции.
Механической характеристикой двигателя называется зависимость угловой скорости вала двигателя от вращающего момента
 f M . Почти все электродвигатели обладают тем свойством,
f M . Почти все электродвигатели обладают тем свойством,
что скорость их является убывающей функцией от момента двигателя. Степень изменения скорости с изменением момента у разных двигателей различна и характеризуется жесткостью их механической характеристики.
M 2 |
M1 |
|
M |
. |
(21) |
2 |
1 |
|
|
||
|
|
|
|
Различают четыре основных категории механических характеристик электродвигателей (рис. 6).
Рис. 6. Механические характеристики электродивгателей
1.Абсолютно жесткая ( = ∞). Такой характеристикой обладают синхронные двигатели.
= ∞). Такой характеристикой обладают синхронные двигатели.
2.Жесткая. У жесткой скорость с изменением М уменьшается
вмалой степени. Это двигатели постоянного тока независимого возбуждения и ассинхронные двигатели в пределах рабочего диапозона.
3.Мягкая - двигатели постоянного тока последовательного возбуждения.
4.Абсолютно мягкая ( = 0) - момент двигателя с изменением угловой скорости остается неизменным. Это двигатели постоянного тока независимого возбуждени при питании их от источника тока.
12

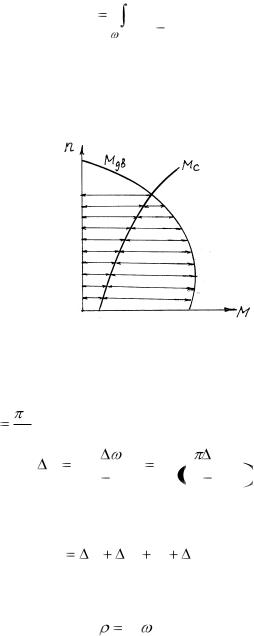
При правильно подобранных и согласованных механических характеристиках производственного механизма и электродвигателя электропривод работает в устойчивом режиме. Причем роль регулятора выполняет ЭДС двигателя (рис. 7).
Рис. 7. Устойчивый режим
Допустим, характеристика двигателя определяется (1). Характеристика механизма в начале (2) - пустой конвейер, рольган. В этом случае двигатель работает со скоростью и М = М1. С увеличением нагрузки (3) двигатель тормозится скорость его снижается, и поэтому уменьшается ЭДС. При уменьшении ЭДС в якорной цепи возрастает ток и момент увеличивается. Рост момента продолжается до тех пор пока не наступит равновесие М = М2 . Таким образом в данном случае электропривод работает в режиме статистической устойчиво-
сти. Это можно выразить, как: |
М |
|
М с |
0 - условие означает, |
|
|
что привод статистически устойчив, если при положительном приращении угловой скорости момент двигателя окажется меньше момента сопротивления и привод вследствие этого затормозится до прежнего значения скорости. При отрицательном приращении угловой скорости момент двигателя окажется больше момента сопротивления, и привод вследствие этого разгонится до прежнего значения скорости. Для асинхронного двигателя (рис .8) могут иметь место как устойчивый, так и неустойчивый режимы работы:
13

Рис. 8. Устойчивый ( 1) и неустойчивый ( 2) режим асинхронного двигателя
4. ПЕРЕХОДНЫЕ РЕЖИМЫ. ОПРЕДЕЛЕНИЕ ВРЕМЕНИ РАЗГОНА, ТОРМОЖЕНИЯ
Разгон, торможение электропривода, переход от одной скорости к другой называется переходными режимами работы. Определение времени переходных процессов основано на интегрировании уравнения движения привода:
|
|
|
|
|
М М с |
Y |
d |
, |
||||
|
|
|
|
|
dt |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
где М - момент электродвигателя. |
|
|
|
|
|
|
||||||
Если М |
Мс, то |
d |
0 - ускорение двигателя. |
|||||||||
dt |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
Если М |
Мс, то |
d |
0 - замедление. |
|
|
|
|
|||||
dt |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||
При М = Мс, |
d |
|
0 - установившийся режим. |
|||||||||
dt |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||
Время разгона: |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
уст |
|
Y |
|
|
||
|
|
|
|
|
t раз |
|
|
|
dw . |
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
0 |
М |
М с |
|
||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
(22)
(23)
14
Время торможения:
|
0 |
|
Y |
|
|
|
tторм |
|
|
|
dw . |
(24) |
|
|
|
|
|
|||
|
|
|
|
|||
|
|
М |
|
М с |
|
|
|
уст |
|
|
|
|
|
Аналитическая зависимость изменения скорости при пуске или торможении имеет обычно сложный вид. Поэтому пользуется обычно графоаналитическим способом (рис. 9)
Рис. 9. Расчет переходного процесса
График разбивается на большое число участков, в пределах которых (М - Мс) - можно считать постоянным в пределах каждого
участка  30h ,
30h ,
ti |
Y |
|
|
|
Y |
n |
. |
(25) |
|
|
|
|
|
|
|||
M i |
M c |
|
30 M i |
M c |
||||
|
|
|
|
|||||
|
|
i |
|
|
|
i |
|
|
Полное время разгона: |
|
|
|
|
|
|
|
|
t |
t1 |
t2 |
... |
tn . |
|
|
(26) |
|
По итогам расчета можно построить диаграмму мощности на |
||||||||
период переходного режима (рис.10). |
|
|
|
|
||||
|
|
М . |
|
|
|
(27) |
||
15

Рис. 10. Диаграмма мощности переходного процесса
Участок АВ определяет затраты энергии на разгон электропривода.
5. ВИДЫ ЭЛЕКТРОДВИГАТЕЛЕЙ И ПОРЯДОК ИХ ВЫБОРА ДЛЯ МАШИН И МЕХАНИЗМОВ
В КУЗНЕЧНО-ШТАМПОВОЧНОМ ПРОИЗВОДСТВЕ
Разнообразие видов кузнечно-прессовых машин, условия их эксплуатации, регулируемой производительности, оснащения их вспомагательными механизмами и загрузочно-выгрузными устройствами предопределяет широкий спектр использования различных по принципу действия и по конструктивному исполнению электродвигателей.
В задачу выбора электродвигателя входит: выбор рода тока и номинального напряжения; выбор номинальной частоты вращения; выбор конструктивного исполнения; определение номинальной мощности и выбор соответствующего ей двигателя по каталагу.
При выборе двигателя исходным является полная производственная характеристика механизма, для которого его подбирают. Выясняется длительность работы, характер изменения момента сопротивления, требуются ли регулирование по скорости, каковы условия внешней среды.
16
Ориентировочные рекомендации для основных видов электродвигателей даны в табл. 1:
Назначение электродвигателей
|
Таблица 1 |
Вид электродвигателей |
Назначение |
Асинхронный с КЗ - ротором |
Для нерегулируемого по скоро- |
нормального исполнения |
сти привода, не требующий |
|
больших пусковых моментов |
Асинхронные с глубокопазными |
Для нерегулируемого по скоро- |
КЗ - ротором или с двойной |
сти привода, если требуется |
клеткой |
большие пусковые моменты. |
|
Для нерегулируемого и регули- |
|
руемого по скорости в неболь- |
Асинхронный с фазным ротором |
ших пределах привода при час- |
|
тых пусках при больших пуско- |
|
вых моментах |
|
Для нерегулируемого привода |
|
средней и большой мощности, |
Синхронный |
работающих с редкими пусками |
|
в продолжительном режиме (на- |
|
сосные установки) |
Электродвигатель постоянного |
Регулируемый в широких преде- |
тока |
лах по скорости привод. |
Как правило, все электродвигатели запитываются стандартным трехфазным напряжением 380/220 v.
При выборе конструктивного исполнения двигателя учитывают три фактора:
1.Защиту от воздействия окружающей среды;
2.Обеспечение охлаждения;
3.Способ монтажа.
По способу защиты электродвигатели бывают: открытые, защищенные, закрытые, взрывоопасные.
-открытые - не имеют средств защиты и устанавливаются в сухих помещениях без пыли и грязи.
-защищенные - делятся на три категории:
а) защищенные от случайного соприкосновения с токоведущими частями и попадания посторонних предметов. Они имеют сетки, закрывающие отверстия в корпусе.
17
б) защищенные от попадания капель. Они снабжены кроме сеток специальными козырьками.
в) защищенные от дождя и применяются на открытом воздухе. г) закрытые - двигатели устанавливаются в помещениях загрязненной пылью с металлическими включениями, парами масла
или керосина.
д) взрывоопасные - имеют корпус способный выдержать взрыв газа внутри двигателя и исключают при этом выбор пламени. На крышке коробки выводов этих двигателей отлит знак РВ - рудничный взрывобезопасный или ВЗГ - взрывобезопасный в газовой среде.
По способу охлаждения различают двигатели с естественным охлаждением, с самовентиляцией внутренней или наружной и с принудительной вентиляцией. По способу монтажа: с горизонтальным расположением вала или с вертикальным на лапах или с креплением с помощью фланца. Существуют встраиваемые двигатели, корпуса которых представляют единое целое с корпусом или станиной.
6. АСИНХРОННЫЕ ДВИГАТЕЛИ
Наиболее компактными, надежными и экономичными двигателями, сохраняющими примерно постоянную скорость при изменениях нагрузки, является асинхронный двигатель с короткозамкнутым ротором. В кузнечно-штамповочном машиностроении эти двигатели являются самыми распространенными.
Двигатель содержит две основные части: неподвижную - статор, подвижную - ротор. Статор собран из штамповочных листов электротехнической стали. По внутренней кромке листов вырублены пазы, которые создают в статоре каналы для укладки изолированного медного привода.
Короткозамкнутый ротор выполнен в виде «беличьей клетки». Стержни обычно медные расположены в пазах замыкающих колец. Принцип действия асинхронных двигателей основан на двух явлениях: образовании в обмотке статора вращающегося магнитного поля и воздействии этого поля на токи индуицированные в короткозамкнутых витках ротора.
18
Для возбуждения в статоре вращающегося магнитного поля необходимо соответствующим образом расположить намагничивающие катушки в статоре и подать на катушки трехфазное напряжение, обеспечивающее временной сдвиг токов в катушках. Обмотки статора обычно соединены в треугольник. Симметричная система токов возбуждает в сердечнике вращающееся поле с одной парой полюсов, если каждая фаза обмотки статора образована одной катушкой. За
одну минуту магнитное поле сделает n |
60 |
об/мин = 60f об/мин. T |
1 |
, |
|
T |
f |
||||
|
|
|
где f - частота переменного тока
Можно получить многополюсное поле. Для этого необходимо количество катушек в фазе увеличить, при этом угловые размеры катушки уменьшаются. Например, для создания поля с двумя парами полюсов в каждую фазу обмотки статора включают две катушки. Их размеры по сравнению с двухполюсной уменьшают в два раза, то
есть витки располагают в пазы под углом |
180 |
90 , а оси катушек |
||||
|
2 |
|
|
|||
|
|
|
|
|||
разных фаз устанавливаются под углами |
120 |
|
60 . Скорость вра- |
|||
|
2 |
|
|
|||
|
|
|
|
|||
щения магнитного поля с двумя парами полюсов в два раза меньше, чем двухполюсного, так как за один период изменения тока полюсы поворачиваются только на 180 º.
|
В общем случае: |
|
|
|
|
|
|||
|
|
|
n |
60 f |
, f = 50. |
|
(28) |
||
|
|
|
p |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
1 |
2 |
|
3 |
|
4 |
5 |
6 |
n |
|
3000 |
1500 |
|
1000 |
750 |
600 |
500 |
|
Вращающееся магнитное поле пересекает проводники обмотки ротора и наводит в них ЭДС. Поскольку обмотка замкнута, то ЭДС вызывает в них ток того же направления. В результате взаимодействия тока ротора с вращающимся полем, возникают силы, приводящие ротор во вращение.
Возникновение токов в роторе возможно лишь при относительном движении проводников ротора относительно магнитного поля, то есть при их движении в одну сторону, но с разными скоро-
19

стями (принцип асинхронности). Степень разности скоростей оцениваем - скольжением (рис. 11).
S |
0 |
|
, |
(29) |
|
0 |
|||
|
|
|
|
где - угловая скорость вращения магнитного поля в статоре; 0 - угловая скорость вращения ротора.
- «+» - при вращении ротора в направлении вращения магнитного поля - режим двигателя.
- «-» - при встречном движении - режим электромагнитного тормоза.
Если ротор с помощью другого двигателя вращается в направлении магнитного поля со скоростью более высокой - режим генератора.
Рис. 11. Режимы работы асинхронного двигателя
Трехфазные асинхронные двигатели подразделяются на два типа: короткозамкнутые и с фазным ротором. Двигатель с фазным ротором имеет на роторе трехфазную обмотку, соединенную звездой. Свободные концы обмоток подводят к трем контактным кольцам на валу. При помощи щеток контактные кольца соединены с регулируемым трехфазным реостатом. Это улучшает запуск двигателя и позволяет регулировать скорость вращения (рис. 12).
20