

1491
.pdfУДК 621.452:681.513.6
ИДЕНТИФИКАЦИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ ГАЗОТУРБИННОЙ УСТАНОВКИ В ПРОЦЕССЕ УПРАВЛЕНИЯ
И.В. Бахирев, Б.В. Кавалеров
Пермский национальный исследовательский политехнический университет
Исследуется метод беспоисковой идентификации для газотурбинной установки, входящей в состав электростанции. Приведены результаты компьютерного моделирования.
Ключевые слова: газотурбинная установка, идентификация, математическая модель.
IDENTIFICATION OF GAS TURBINE POWER PLANT
IN THE CONTROL PROCESS
I.V. Bahirev, B.V. Kavalerov
Perm National Research Polytechnic University
The article investigates searchless identification method for a gas turbine plant which is part of the power plant. The results of computer simulations are presented.
Keywords: gas turbine unit, identification, mathematical model.
Введение
Газотурбинные установки (ГТУ) наземных версий применения являются сложными нелинейными объектами. В наземных условиях они применяются в качестве газоперекачивающих агрегатов и в составе электростанций. К газотурбинным электростанциям (ГТЭС) в ГОСТ Р 50783–95 предъявляются достаточно жесткие требования [1]. Для достижения этих требований возможно использование математических моделей ГТУ для автоматической настройки или в составе адаптивных регуляторов.
Теоретические основы идентификации объекта управления в реальном времени с помощью функции Ляпунова
Беспоисковый алгоритм идентификации с адаптивной моделью (БАИАМ) для линейного непрерывного объекта с описанием в пространстве состояний основан на методе функций Ляпунова.
При этом процедура в целом в значительной мере остается эвристической, так как нахождение функций Ляпунова для такого класса систем не имеет общих формальных методов [2].
Наиболее простым является случай линейных объекта и модели. В работе [2] метод используется для получения линейной модели линейного объекта. Рассмотрим возможность получения линейной модели нелинейного объекта в реальном времени с использованием математического аппарата из работы [2]. Для этого будем считать, что в каждый момент времени настраиваемая модель является линейной моделью, соответствующей текущему состоянию нелинейной объекта, для этого в начальный момент времени параметры линейной модели должны соответствовать нелинейному объекту.
Линейный объект и линейная модель описываются в пространствах состояний [2]:
x = Ax + Bu, |
(1) |
61
xм = Aмxм + Bмu. xм = Aмxм + Bмu, (2)
где x – вектор переменных состояния
объекта; xм – вектор переменных состояния модели; u – вектор управления; x – вектор производных переменных
состояния объекта; xм – вектор производных переменных состояния модели.
Соответствующие векторы и матрицы объекта и модели имеют одинаковые размерности, и рассматриваются отклонения
∆x = x – xм, ∆A = A – Aм, |
(3) |
|
∆B = B – Bм. |
||
|
Все векторы x, xм, u, x, xм счита-
ются непосредственно наблюдаемыми (измеряемыми).
Вычитая выражение (2) из уравнения (1), находим
∆x = ∆Ax + Aм∆x + ∆Bu. |
(4) |
Матрица Aм соответствует текущей настройке модели и известна; ∆x определяется непосредственно по измеряемым величинам, так же как и ∆x. Таким образом, наблюдаемый сигнал невязки можно принять
∆z = ∆x – Aм∆x = ∆Ax + ∆Bu. (5)
Элементы матриц А, Ам, В, Вм независимы друг от друга, поэтому идентификация может осуществляться параллельно по строкам этих матриц. Соответственно записываем
∆zi = ∆A |
|
i |
|
x + ∆B |
|
i |
|
u,i = |
1,n, |
(6) |
||||||||
|
|
|
|
|||||||||||||||
где ∆A |
|
i |
|
,∆B |
|
i |
|
– i-е строки |
матриц |
|||||||||
|
|
|
|
|||||||||||||||
∆A,∆B.
Функцию Ляпунова для i-го канала БАИАМ будем искать в виде по- ложительно-определенной квадратичной формы
Vi = 0,5(∆Ai K i ∆AТi + ∆Bi D i ∆BTi ), (7)
где K i ∆, D i – положительно-опреде-
ленные диагональные матрицы заданных постоянных коэффициентов. Производная по времени функции Vi
Vi = ∆Ai K i ∆AТi + ∆Bi D i ∆BTi . (8)
Пусть
∆AТi = −(K i )–1 ∆zix =
= – (K i )–1 (∆Ai x + ∆Bi u)x,
(9)
∆BТi = – (D i )–1 ∆ziu =
= – (D i )–1 (∆A i x + ∆Bi u)u.
Подставляя выражения (9) в формулу (8), находим
Vi = – (∆A |
|
i |
|
x + ∆B |
|
i |
|
u)2 . |
(10) |
|
|
|
|
Выражения (7), (9) свидетельствуют об асимптотической сходимости процесса настройки модели, если обеспечиваются соотношения (9) и величина невязки (6) обращается тождественно в нуль
на реализациях x(t) X , u(t) U |
только |
||||||||||||||
при ∆A |
|
i |
|
= 0, |
∆B |
|
i |
|
= 0. Выражения (9) |
||||||
|
|
|
|
||||||||||||
преобразуются к виду |
|
||||||||||||||
|
|
AмТi |
= (K i )−1 ∆zix + ATi , |
(11) |
|||||||||||
|
|
|
|
|
= (D i )−1 ∆zix + B |
|
|
|
|
||||||
|
|
BмТi |
|
Ti |
|
. |
|
||||||||
|
|
|
|
|
|||||||||||
Этот алгоритм настройки |
модели |
||||||||||||||
точно нельзя |
реализовать, так |
как A |
|||||||||||||
и B неизвестны. Однако при достаточно медленном изменении А и/или достаточно больших коэффициентах усиления, образующих диагональные матрицы,
K* i = (K i )−1 , D* i = (D i )−1 .
62
Членами ATi , BTi можно пренебречь и заменить выражения (11) алгоритмом
AмТi = K* i ∆zi x, BмТi = D* i ∆ziu. (12)
Это реализуемый алгоритм настройки модели. Запишем его в матричной
форме, полагая K* i , D* i не зависящими от i:
Aм = ∆z(K x)T , Bм = ∆z(D u)T . (13)
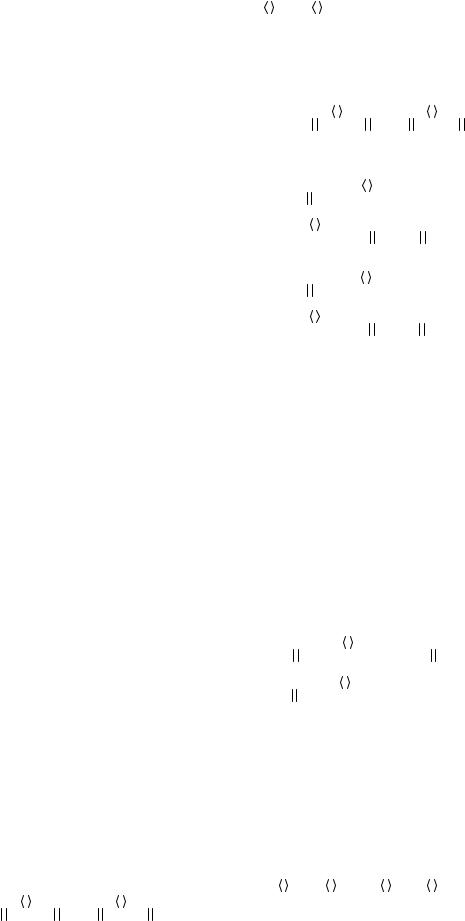
Структурная схема, соответствующая уравнениям (1), (2), (13) и соотно-
шению ∆z = ∆x −Aм∆x, приведена на рис. 1.
Рис. 1. Структурная схема идентификации в реальном времени
Если разработать разностную схему для численного интегрирования выражений (2), (13), то реализация данного БАИАМ в программном виде, как легко видеть, требует вычислительной производительности лишь в полтора-два раза большей той, которая необходима для моделирования идентифицируемого объекта в реальном времени [2]. Однако здесь требуется высокая степень непосредственной наблюдаемости объекта (измерение х и измерение или вычисление х).
Практическая реализация метода идентификации объекта управления в реальном времени с помощью функции Ляпунова
Рассмотрим настройку параметров линейной модели по нелинейной модели ГТУ. Нелинейная модель ГТУ является сложной поэлементной моделью, построенной по физическим принципам, и включает в себя нелинейные зависимости между внутренними переменными. Нелинейная модель ГТУ выступает в качестве объекта, параметры которого неизвестны. Структура линейной модели ГТУ представлена на рис. 2.
Рис. 2. Структура нелинейной модели ГТУ:
1 – |
KTS ; |
2 – |
1 |
; |
3 – |
KE ; 4 – |
1 |
|
|
|
|||||||
Tтк p +1 |
Jс.т p |
|||||||
|
|
|
|
|
|
На рис. 2 KTS – коэффициент, отражающий преобразование расхода топли-
ва (кг/ч) |
в |
обороты турбокомпрессора |
||
(об/мин); |
Tтк – постоянная времени тур- |
|||
бокомпрессора; KE – коэффициент, от- |
||||
ражающий |
преобразование |
частоты |
||
вращения |
|
турбокомпрессора |
(об/мин) |
|
в мощность свободной турбины |
(кВт); |
|||
NG – мощность нагрузки (кВт); |
Jс.т – |
|||
суммарный приведенный к валу свободной турбины момент инерции; nс.т – частота вращения свободной турбины (об/мин).
Линейная модель включает в себя, помимо модели объекта, регулятор частоты вращения свободной турбины и регулятор дозатора топлива.
Передаточная функция регулятора nс.т имеет следующий вид [3]:
W |
( p) = k |
|
ki +k f p |
, |
(14) |
|
п k +( p) |
||||||
с.т |
|
|
|
|||
|
|
|
i |
|
|
|
63
передаточная функция дозатора газа
W ( p) |
= |
1+ Tд p |
k |
д |
. |
(15) |
|
||||||
G |
|
p |
|
|
||
|
|
|
|
|
||
Векторы x и xм включают в себя |
||||||
x1 = nс.т, x2 = nтк, x3 |
– выход интегратора |
|||||
регулятора дозатора газа, x4 – выход интегратора регулятора nс.т.
В начальный момент времени линейная и нелинейная модели соответствуют режиму работы ГТУ при номинальной нагрузке 6 МВт, таким образом, в каждый момент времени матрицы линейной модели получают приращение, соответствующее с некоторой погрешностью изменениям нелинейного объекта.
Результаты моделирования
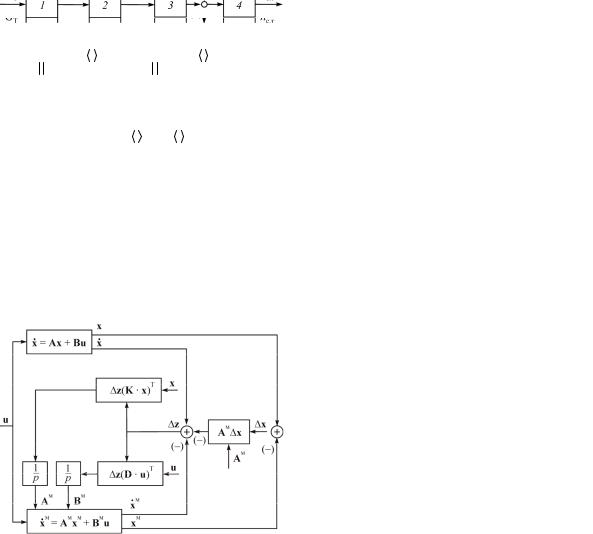
В процессе моделирования нагрузка менялась следующим образом: 12 000 – 10 000 – 7000 – 12 000 кВт. Линейная модель настраивается в реальном времени.
На рис. 3–6 приведены графики переходных процессов для линейной настраиваемой модели и нелинейного объекта. Частота вращения турбокомпрессора, на основании приведенных графиков, является наиболее сложной для идентификации в темпе процесса.
Рис. 4. Частота вращения турбокомпрессора: серый – настраиваемая линейная модель, черный – объект
Рис. 5. Интегратор регулятора дозатора: серый – настраиваемая линейная модель, черный – объект
Рис. 6. Интегратор регулятора свободной турбины: серый – настраиваемая линейная модель, черный – объект
Рис. 3. Частота вращения свободной турбины: серый – настраиваемая линейная модель, черный – объект
64
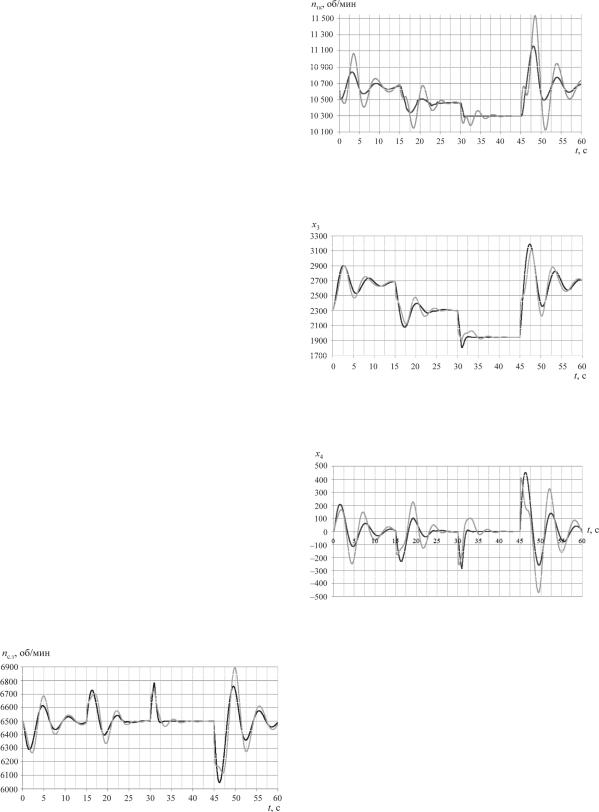
Когда известны расход топлива, частота вращения турбокомпрессора и мощность ГТУ на холостом ходу, соответствующие коэффициенты линейной модели можно заменить на линейные зависимости, построенные по двум точкам – холостому ходу и номинальному режиму. В этом случае задача идентификации становится проще за счет априорной информации. В процессе моделирования нагрузка менялась следую-
щим образом: 12 000 – 10 000 – 7000 –
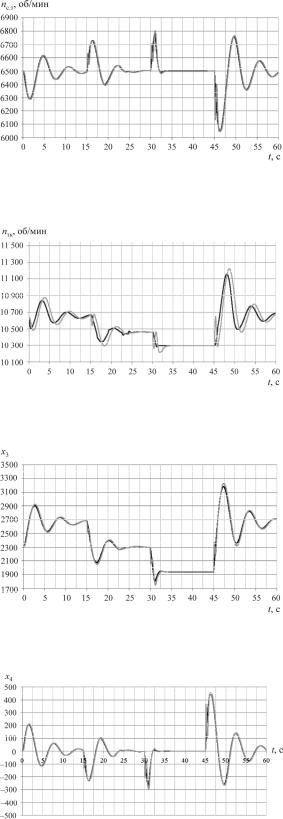
12 000 кВт. Графики переходных процессов приведены на рис. 7–10.
Рис. 7. Частота вращения свободной турбины: серый – настраиваемая модель с линейными зависимостями, черный – объект
Рис. 8. Частота вращения турбокомпрессора: серый – настраиваемая модель с линейными зависимостями, черный – объект
Рис. 9. Интегратор регулятора дозатора: серый – настраиваемая модель с линейными зависимостями, черный – объект
Рис. 10. Интегратор регулятора свободной турбины: серый – настраиваемая модель с линейными зависимостями, черный – объект
Как видно из вышеприведенных графиков, использование априорной информации повысило точность идентификации в темпе процесса для всех переменных.
Заключение
Предложенный метод идентификации в процессе управления демонстрирует высокую точность и быстродействие. К недостаткам метода можно отнести требовательность к параметрам: должен быть измерим не только вектор переменных состояния, но и вектор производных переменных состояния. Полученная таким образом линейная настраиваемая модель может быть использована в составе адаптивных регуляторов или для настройки коэффициентов регулятора ГТУ.
Опубликованные в статье результаты получены в рамках выполнения государственного задания Минобрнауки РФ № 13.832.2014/К «Разработка методологических основ адаптивного управления автономными и неавтономными газотурбинными электростанциями мощностью до 25 МВт».
Список литературы
1.ГОСТ Р 50783–95. Электроагрегаты и передвижные электростанции с двигателями внутреннего сгорания. Общие технические требования. – М.: Издво стандартов, 1995. – 27 с.
2.Красовский А.А. Справочник по теории автоматического управления. –
М.: Наука – 1987. – 711 с.
3.Бахирев И.А., Басаргин Ш.Д., Кавалеров Б.В. Адаптивное управление газотурбинной установкой с эталонной моделью и сигнальной настройкой // Системы управления и информационные технологии. – 2015. – № 2(60). – С. 71–76.
65
УДК 621.3.072
О МОДЕЛИРОВАНИИ СИНХРОННОГО ГЕНЕРАТОРА В СРЕДЕ SIMULINK ДЛЯ ИССЛЕДОВАНИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
И.А. Крылова, М.Е. Тюленев
Пермский национальный исследовательский политехнический университет
Описывается модель синхронного генератора в среде имитационного моделирования MatLab/Simulink, приведены результаты моделирования.
Ключевые слова: синхронный генератор, газотурбинная установка, модель.
SIMULATION OF SYNCHRONOUS GENERATOR IN SIMULINK FOR RESEARCH AUTOMATIC CONTROLLERS
I.A. Krylova, M.E. Tyulenyov
Perm National Research Polytechnic University
This article describes a model of a synchronous generator in the MatLab/Simulink environment, the simulation results are shown.
Keywords: synchronous generator, gas turbine unit, model.
Газотурбинная электростанция является многосвязной системой, поэтому для реализации задачи управления газотурбинной энергетической установкой необходимо максимально учесть влияние входящих в ее состав элементов: газотурбинной установки, электрогенератора, а также учесть влияние возможного изменения конфигурации электрической сети. Предварительной оценке показателей качества вырабатываемой электроэнергии (как выходного параметра) на ранних стадиях проектирования САУ может способствовать применение комплексной математической модели взаимодействия ГТУ, электрогенератора и электросети. Более того, математическая модель позволит решать задачи по настройке САУ в режимах, недоступных при стендовых испытаниях.
Целью данной статьи является создание модели синхронного генератора как части более общей математической модели с перспективой дальнейшего проектирования системы автоматического управления синхронного генератора. Такая САУ обеспечивает поддержание за-
данного напряжения и регулирование мощности генератора при работе с сетью.
Модель электрогенератора составлена для идеализированной явнополюсной синхронной машины с учетом общепринятых допущений. Для описания электромеханических процессов используется система координат d–q, представляющая собой две взаимно перпендикулярные оси, жестко связанные с ротором электрической машины.
Система дифференциальных и алгебраических уравнений синхронного генератора, записанная в осях Парка– Горева, имеет вид
u =−Ψ ω−dΨ /dt −i r, |
||||||
|
d |
q |
|
d |
|
d |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uq =Ψd ω−dΨq /dt −iqr, |
||||||
|
|
|
|
|
|
|
|
|
=dΨ /dt −i r , |
||||
u |
|
|||||
|
f |
f |
f |
|
f |
|
|
|
|
||||
|
=dΨD /dt +iDrD , |
|
||||
0 |
|
|||||
|
|
|
|
|
|
|
|
=dΨ /dt +i r , |
|
||||
0 |
|
|||||
|
|
Q |
Q Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dγ/dt =ω, |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
−Ψ i , |
|
|
|
M =Ψ i |
|
|
||||
|
|
d q |
q d |
|
|
|
|
|
|
|
|
||
66
Ψd |
|
Ld |
||
|
Ψ |
|
|
L |
|
|
D |
|
ad |
|
Ψ f |
= Lfad |
||
|
|
|
|
|
|
Ψq |
|
0 |
|
|
Ψ |
|
|
0 |
|
|
Q |
|
|
Lad |
Ladf |
0 |
LD |
Ladf |
0 |
Lfad |
Lf |
0 |
0 |
0 |
Lq |
0 |
0 |
Laq |
0 |
|
|
Id |
|
0 |
|
|
|
|
|
ID |
|||
0 |
|
× |
I f . |
|
|
|
|
|
|
Laq |
|
Iq |
||
L |
|
I |
|
|
Q |
|
|
Q |
|
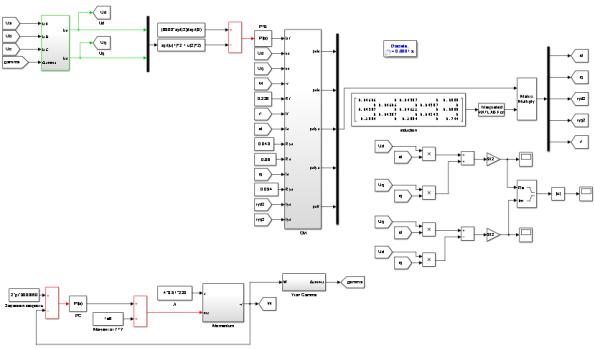
Общий вид модели системы показан на рис. 1. Для предварительной оценки полученной модели при номинальном режиме работы генератора в системе реализованы простейшие контуры регулирования по частоте и напряжению генератора для их стабилизации при изменении параметров электрической сети (активно-индуктивной нагрузки). Частота вращения определяется в модели ГТУ и является входным параметром модели генератора.
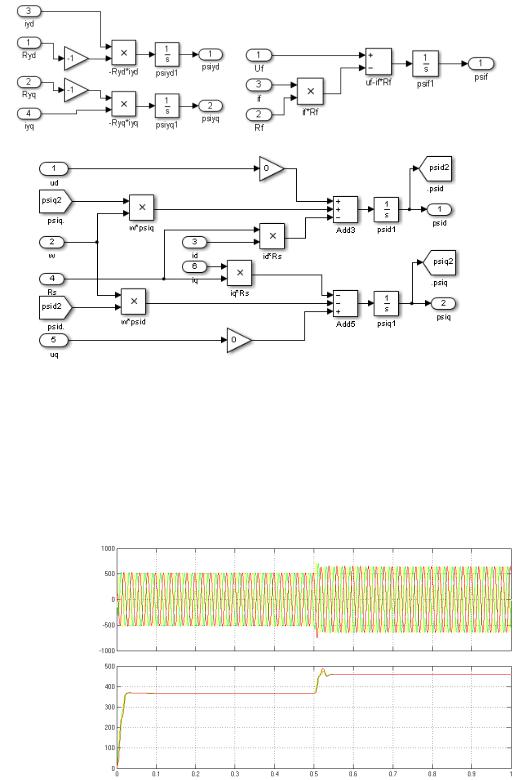
Структура блока «СГ» модели, реализующая дифференциальную часть системы уравнений, показана на рис. 2.
Алгебраическая часть системы уравнений реализована в модели в матричной форме с использованием матрицы индуктивностей (см. рис. 1).
Выход модели генератора представляет собой систему шин (силовые выводы), которая реализуется с использованием контролируемых источников тока, а также блока преобразования токов из ортогональной системы координат d–q в трехфазную систему токов a–b–c. Результаты моделирования приведены ниже в виде временных диаграмм режимных параметров. Время моделирования составляет 1 с. Наброс индуктивной нагрузки происходит в момент времени 0,5 с. За основу принят синхронный генератор PH = 4000 кВт, SH = 5000 кВт,
UH = 6300 В, IH = 458,2 А, f0 = 50 Гц, n = 3000 об/мин.
Рис. 1. Общий вид модели
67
|
Рис. 2. Структура блока «СГ» |
|
Результаты моделирования |
|
|
Параметр |
График изменения |
|
Фазные токи статора, А |
|
|
Мгновенные |
|
значения |
|
|
|
Действующие |
|
значения |
|
|
|
68
Параметр |
График изменения |
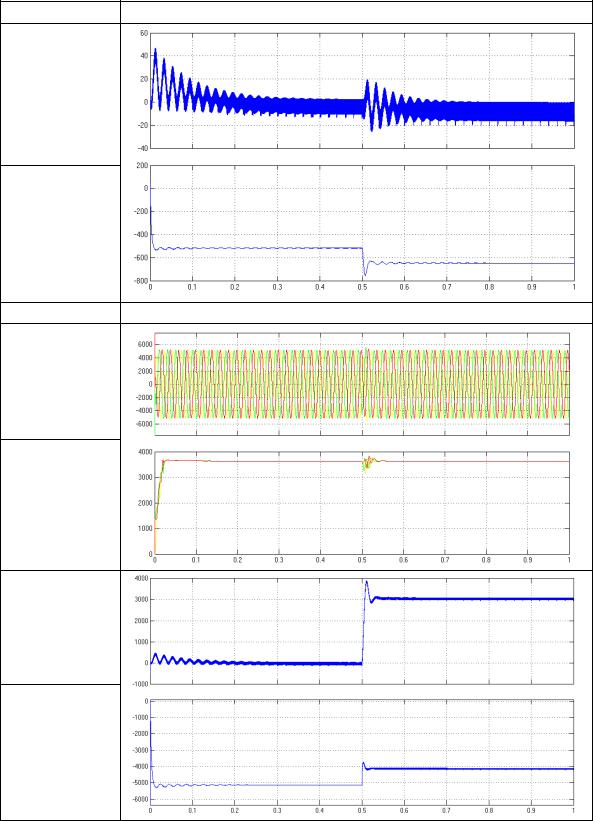
По оси d
По оси q
Фазные напряжения статора, В
Мгновенные
значения
Действующие
значения
По оси d
По оси q
69
Параметр |
График изменения |
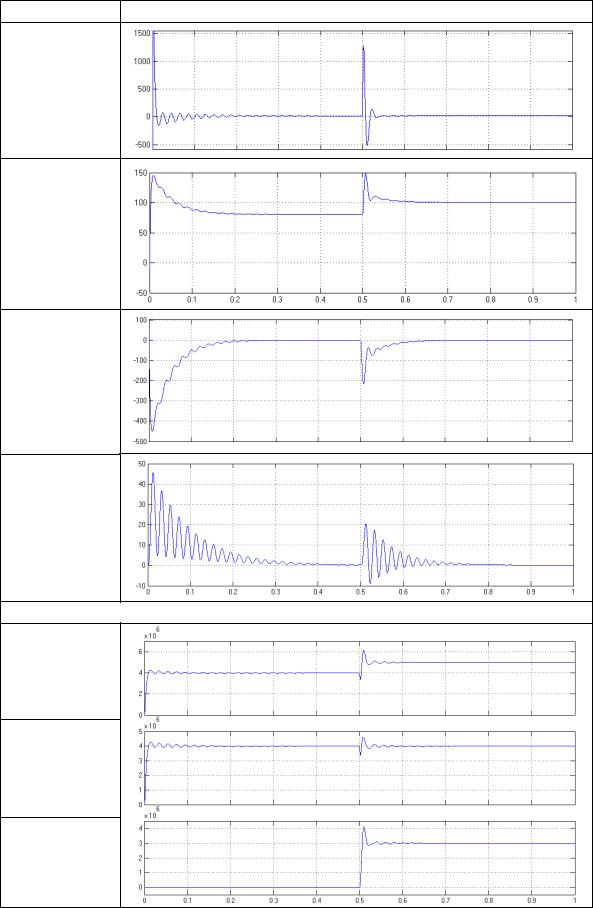
Напряжение
обмотки возбуждения, В
Ток обмотки возбуждения, А
Ток успокоительной обмотки по оси d, А
Ток успокоительной обмотки по оси q, А
Мощность
Полная мощность, ВА
Активная мощность, Вт
Реактивная мощность, вар
70