

1311
.pdfx = xa sin(ωt +φx ),
где x – значение исследуемого параметра;
xa – амплитудное значение исследуемого параметра;
t– время;
φx – угол сдвига фазы исследуемого параметра.
Математическая модель позволила выявить существенное влияние реальных граничных условий на НДС образца-столбика и некорректность обычной экспериментальной процедуры определения параметров комплексного коэффициента Пуассона по формулам (1) без учета соответствующих поправок:
(µ* )Э = urb 2l0 , ux1 d0
(1)
(φµ )Э = φurb −φux1 +180,
где (µ* )Э , (φµ )Э – определяемые на базе обычной эксперименталь-
ной процедуры значения динамического коэффициента Пуассона и угла сдвига фазы между продольной и поперечной деформациями дополнительного к 180 градусам;
urb – амплитуда радиального смещения образца всреднем сечении; ux1 – амплитуда заданного осевого смещения образца;
l0 , d0 – начальная длина и диаметр образца;
φurb – угол сдвига фазы радиального смещения наружной поверхности образца в среднем сечении относительно фазы φux1 = 0 , за-
даваемого осевого смещения (в градусах).
После постановки математического эксперимента по разработанной модели была получена информация по величине базовых длин для
комплексного модуля lБЕ |
и комплексного коэффициента Пуассона lБµ , |
||
а также по поправкам углов сдвига фазы, определяемых следующими |
|||
соотношениями: |
|
|
|
|
lБµ = |
(µ* )Э d0ux1 |
, |
|
|
||
|
|
2urb |
|
|
81 |
||
Стр. 81 |
ЭБ ПНИПУ (elib.pstu.ru) |
||

lБE = (E* )Эux1 ,
сДuД
∆φµ = (φµ )M −(φµ )Э,
∆φE = (φE )M −(φE )Э,
где (E* )Э , (φE )Э – определяемые на базе обычной экспериментальной
процедуры значения динамического модуля и угла сдвига фазы между напряжением и продольной деформацией;
(φµ )M , (φµ )E – углы сдвига фазы между напряжением и продоль-
ной деформацией, продольной и поперечной деформациями в материале соответственно;
∆φE , ∆φµ – соответствующие поправки по углам сдвига фазы; uД – амплитуда смещения датчика усилий.
Анализ результатов показал, что базовые длины и поправки по углам сдвига фазы зависят от параметров комплексного коэффициента Пуассона и динамического модуля, а поправка ∆φE несущественно от-
личается от поправки ∆φµ . С учетом этого, а также в силу того, что ре-
альные углы сдвига фазы между напряжением и деформацией более чем на порядок превышают величину самой поправки, было принято, что ∆φE ≈ ∆φµ . На основании регрессионного анализа результатов ма-
тематического эксперимента были получены феноменологические полиномиальные модели для lБE , lБµ , ∆φµ в зависимости от lg(E* )M ,
(µ* )M , (φE )M и (φµ )M .
Для определения истинных деформационных свойств вязкоупругих материалов (E* )M , (µ* )M , (φE )M и (φµ )M была предложена итера-
ционная процедура (обратная задача), связанная с последовательным уточнением базовых длин и поправки ∆φµ . Исходной информацией
для решения обратной задачи являются данные динамических опытов, проведенных по разработанному, близкого к D-оптимальному экспериментальному плану, включающему 9 точек факторного пространства «частота нагружения – температура опыта» и изначально принятые ба-
зовые длины lБE , |
lБµ . Итерационная процедура заканчивается при вы- |
полнении условий: |
|
82 |
|
Стр. 82 |
ЭБ ПНИПУ (elib.pstu.ru) |
∆lБE = lБkE+1 −lБkE ≤ δ1,
∆lБµ = lБkµ+1 −lБkµ ≤ δ1,
∆φµk +1 −∆φµk ≤ δ2 ,
где δ1, δ2 – заданные точности определения базовых длин и поправ-
ки по углу сдвига фазы соответственно; k – номер итерации.
Для описания параметров комплексных операторов использовались полиномиальные зависимости, примененные ранее для комплексного модуля упругости [4], и, как показал регрессионный анализ, адекватные и для описания параметров комплексного коэффициента Пуассона в форме:
µ* = c0 +c1 lg ν′+c2 (lg ν′)2 +c3 (lg ν′)3 +c4 (lg ν′)4 ,
|
φµ = b0 +b1 lg ν |
′ |
+b2 |
|
′ |
2 |
+b3 |
′ 3 |
, |
(2) |
|
|
(lg ν ) |
|
(lg ν ) |
||||||
|
lg a = a +a T +a T 2 , |
|
|
|
||||||
|
T |
|
0 |
1 |
|
2 |
|
|
|
|
где µ* – динамический коэффициент Пуассона, µ* = |
|
µ12 +µ22 ; |
||||||||
aT |
– коэффициент температурного смещения; |
|
|
|||||||
Т – температура; |
|
|
|
|
|
|
|
|
|
|
ν′ |
– приведенная частота нагружения, ν′ = νaT . |
|
|
|||||||
an |
(n = 0,1,2); bp (p = 0,1,2,3); |
cr (r = 0,1,...,4) |
|
– коэффициенты, |
||||||
определяемые в результате параметрической идентификации.
По окончании итерационного процесса по откорректированным данным проводится повторная параметрическая идентификация поли-
номиальных |
зависимостей µ |
* |
= |
′ |
φµ = |
f |
′ |
E |
* |
= |
′ |
||
|
f1(lg ν ), |
2 (lg ν ) , |
|
f3 (lg ν ). |
|||||||||
φE = |
f |
′ |
в форме (2) и ей аналогичной для комплексного модуля |
||||||||||
4 (lg ν ) |
|||||||||||||
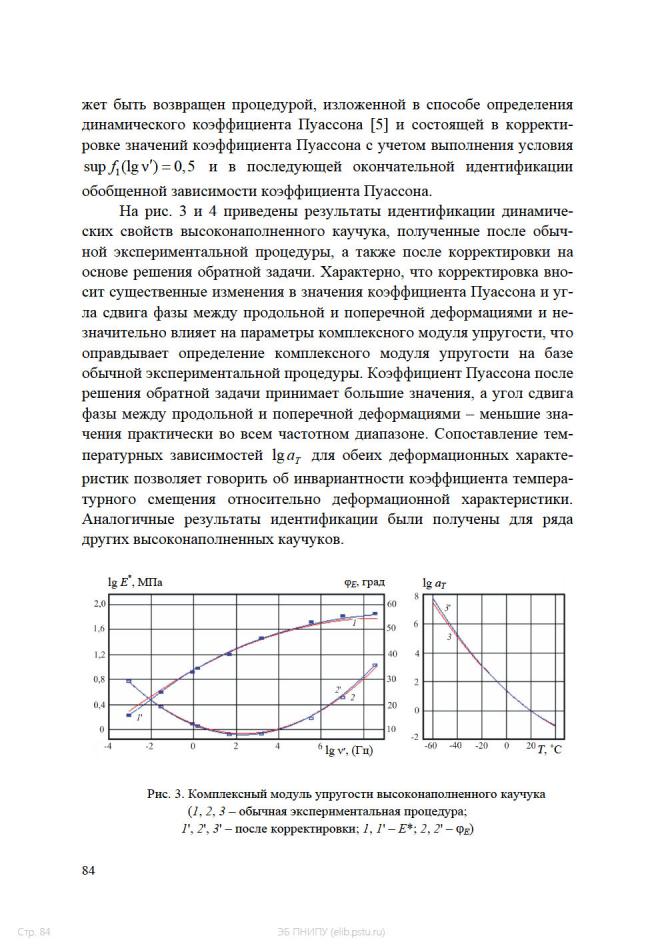
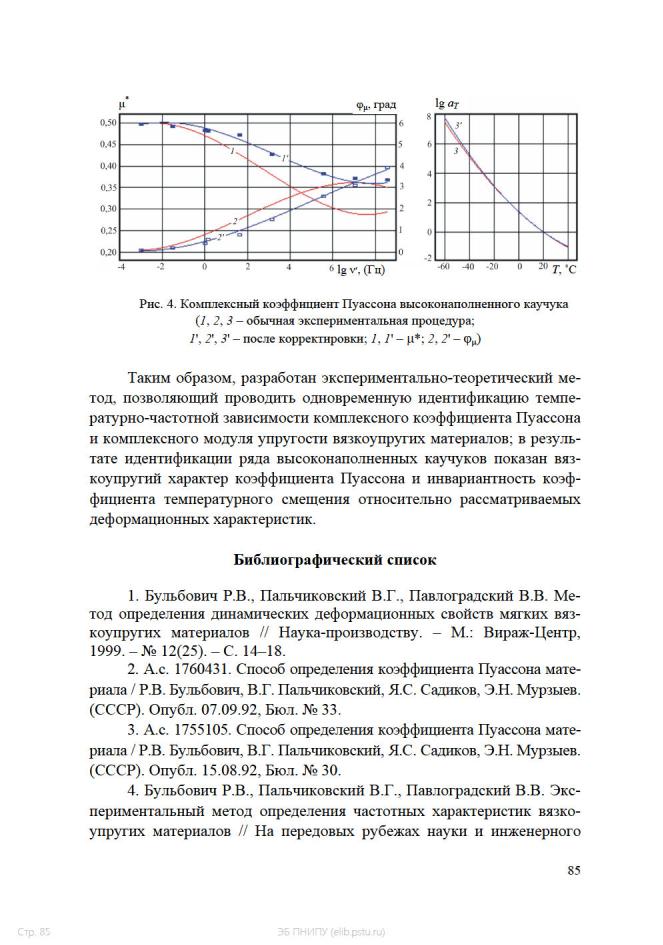
упругости с использованием процедуры случайного поиска и алгоритма среднестатистического градиента. Повторная параметрическая идентификация может изменить начальный участок так, что
|
′ |
|
sup f1(lg ν ) станет больше значения 0,5. В этом случае математическое |
|
описание может потерять физический смысл для материалов, являю- |
|
щихся несжимаемыми в статических условиях. Физический смысл мо- |
|
83 |
Стр. 83 |
ЭБ ПНИПУ (elib.pstu.ru) |
творчества: тр. 2-й междунар. НТК Регион. урал. отд. АИН. – Екатеринбург: Изд-во УГТУ, 2000. – 433 с.
5. А.с. 1827573. Способ определения динамического коэффициента Пуассона / Р.В. Бульбович, Э.Н. Мурзыев, В.В. Павлоградский, В.Г. Пальчиковский, Я.С. Садиков. (СССР). Опубл. 15.07.93, Бюл. № 26.
Получено 1.12.2010
86
Стр. 86 |
ЭБ ПНИПУ (elib.pstu.ru) |
УДК 624.04
В.В. Павлоградский, Р.В. Бульбович
Пермский государственный технический университет
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДИНАМИЧЕСКОГО ПОВЕДЕНИЯ КОНСТРУКЦИЙ НА ОСНОВЕ НИЗКОМОДУЛЬНЫХ МАТЕРИАЛОВ
Приводятся математическая модель динамического поведения и результаты динамического анализа конструкций на основе низкомодульных материалов. Задача решена методом конечных элементов (МКЭ) на базе вариационного подхода. Приводятся результаты исследования продольных колебаний двухслойного стержня с учетом вязкоупругих свойств материалов. Проведен анализ влияния параметров комплексного оператора на динамические характеристики вязкоупругой конструкции. В расчетах учитывается зависимость комплексного модуля упругости от частоты нагружения.
Ключевые слова: математическая модель, динамическое поведение, низкомодульные материалы, метод конечных элементов, вариационный принцип, вязкоупругие свойства, собственные частоты, коэффициент демпфирования колебаний.
Важнейшим условием обеспечения высокой надежности конструкций является необходимость наряду с обычными эксплуатационными нагрузками (температура, давление, массовые силы и др.) учитывать при проектировании и действие нестационарных нагрузок. Примерами таких нагрузок являются выход ракетного двигателя на режим, действие осевых перегрузок, встречающихся, например, в системах залпового огня или в противоградовых ракетах, и т.д. В этом случае могут иметь место ярко выраженные участки нестационарности. В связи с указанным возникает необходимость проведения динамического анализа конструкций при действии различных нестационарных нагрузок.
Для решения задачи используется следующий вариационный принцип: среди всех допустимых значений перемещений фактически существующие определяются вариационным уравнением [1], которое записывается в следующем виде:
J = |
2E |
(1+µ)(1−2µ) |
n
∑∫
i=1 V
|
|
|
∂u |
|
|
2 |
|
|
x |
|
|||
(1 |
−µ) |
|
|
|
||
|
|
|
||||
|
|
∂x |
|
|||
|
|
|
|
|
|
|
|
∂uy 2 |
|
∂u |
z |
2 |
|
||
+ |
|
|
+ |
|
|
|
+ |
|
∂y |
|
|
||||||
|
|
|
∂z |
|
|
|||
|
|
|
|
|
|
|
|
|
87
Стр. 87 |
ЭБ ПНИПУ (elib.pstu.ru) |

|
|
|
|
∂u |
|
∂uy |
|
|
∂uy ∂u |
|
|
∂u |
|
∂u |
|
|
|
∂u |
|
|
∂uy 2 |
|||||||||||
|
+2µ |
|
|
|
x |
|
|
|
|
+ |
|
|
|
|
|
z |
+ |
|
|
x |
|
z |
|
+λ |
|
x |
+ |
|
|
|||
|
|
|
|
|
|
|
|
∂y |
|
|
|
|
|
|
|
∂x |
||||||||||||||||
|
|
|
|
∂x ∂y |
|
|
|
|
|
∂z |
|
∂x ∂z |
|
|
∂y |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ux |
|
|
|
∂uz |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
+ |
|
+ |
|
|
|
dV |
− |
∫S |
( |
P u |
|
+ P u |
|
+ P u |
dS, |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
x |
y |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
∂z |
|
|
|
∂x |
|
|
|
|
|
|
x |
|
|
y |
|
z |
z |
) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂uy |
|
∂u |
2 |
||
+ |
|
+ |
|
z |
+ |
∂z |
|
||||
|
|
∂y |
|
||
(1)
где n – количество конечных элементов; V – объем конечного элемента;
S– площадь конечного элемента;
λ– постоянная Ляме, λ = 1−22µ ;
ux , uy , uz – перемещения вдоль осей координат; x, y, z – координаты;
E– модуль упругости материала;
µ– коэффициент Пуассона материала;
Px , Py , Pz – поверхностные силы вдоль осей координат.
При решении задачи конструкция разбивается на конечные элементы. В зависимости от решаемой задачи могут использоваться одномерные или плоские конечные элементы с различной степенью аппроксимации искомой функции. Для определения напряженнодеформированного состояния (НДС) конструкций желательно использование высокоточных конечных элементов, так как использование элементов с линейным законом изменения перемещений напряжения от элемента к элементу изменяются ступенчато. Это приводит к тому, что в области значительных градиентов напряжений необходимо использовать более мелкую сетку конечных элементов. Для получения достаточно точных результатов требуется разбивать область на довольно большое число элементов. Как правило, усложнение элемента при заданной степени точности приводит к уменьшению числа неизвестных. Поэтому для повышения точности решения задачи определения НДС конструкций необходимо использовать высокоточные элементы, например, квадратичные треугольные или четырехугольные элементы или эрмитовые треугольные конечные элементы. Для определения собственных частот и форм колебаний в большинстве случаев достаточно использование конечных элементов с линейной аппроксимацией искомой функции.
88
Стр. 88 |
ЭБ ПНИПУ (elib.pstu.ru) |
Уравнение равновесия системы конечных элементов, находящейся в состоянии движения, имеет вид
[M ]{δ}+[K ]{δ} ={R(t)}, |
(2) |
где [K] – матрица жесткости конструкции;
[M ] – матрица масс конструкции;
{δ} – вектор неизвестных (перемещений и их производных);
{δ} – вектор узловых ускорений;
{R(t)} – вектор нагрузки в момент времени t .
Математически уравнение (2) представляет собой систему линейных дифференциальных уравнений второго порядка, и в принципе ее решение может быть получено с помощью стандартных процедур решения дифференциальных уравнений с постоянными коэффициентами. Однако эти процедуры становятся неэффективными при больших порядках матриц. Методы, используемые для решения уравнения (2), делятся на две группы: прямого интегрирования и разложения по собственным формам [2].
При прямом интегрировании уравнения (2) используется численная пошаговая процедура. Термин «прямое» означает, что перед интегрированием не производится никаких преобразований уравнений. Прямое интегрирование основано на двух идеях. Во-первых, удовлетворение условий равновесия (2) требуется не в любой момент времени t , а только на отдельных коротких отрезках времени ∆t . Это означает, что равновесие с учетом сил инерции рассматривается в дискретных точках временного интервала. Следовательно, становится возможным эффективное использование в методах прямого интегрирования всего вычислительного аппарата статистического анализа. Вовторых, учитывается изменение перемещений, скоростей и ускорений внутри каждого временного интервала ∆t . Именно способ учета этих изменений определяет точность, устойчивость и экономичность процедуры решения.
Использование прямого интегрирования эффективно, если требуется найти реакцию системы на сравнительно кратковременное воздействие (т.е. за несколько временных шагов). Однако при большом количестве шагов может оказаться более эффективным первоначаль-
89
Стр. 89 |
ЭБ ПНИПУ (elib.pstu.ru) |
ное преобразование уравнений равновесия (2) к виду, при котором пошаговое решение потребует наименьших затрат. При разложении перемещений по собственным формам колебаний уравнение равновесия
(2) приводится к n отдельным уравнениям вида
|
xi (t) +ω2 x (t) = r (t), |
(3) |
|
|
i i |
i |
|
где r (t) = φT R(t) ; |
|
|
|
i |
i |
|
|
i=1, 2, …, n; |
|
|
|
φi |
– вектор i-й собственной формы; |
|
|
ωi |
– i-я собственная частота колебаний. |
|
|
Соотношение (3) – уравнение равновесия системы с одной степенью свободы с единичной массой и жесткостью ωi2 .
Решение каждого уравнения (3) можно получить с помощью ин-
теграла Дюамеля [3]: |
|
|
|
|
1 |
t |
|
xi (t) = |
|
∫0 |
ri (τ)sin ωi (t −τ)dτ. |
ωi |
Интеграл Дюамеля должен в общем случае вычисляться численно. Для получения полной реакции системы необходимо найти решения всех n уравнений (3). Перемещения узловых точек получаются суперпозицией реакций системы по всем формам:
n |
|
δ(t) = ∑φi xi (t). |
(4) |
i=1
Таким образом, для получения реакции системы методом разложения по собственным формам требуется, во-первых, вычислить собственные значения и собственные векторы системы (2), затем решить уравнения равновесия (3) и, наконец, сложить реакции по каждой собственной форме в соответствии с (4).
Из методов прямого интегрирования наибольшее распространение нашли методы центральных разностей, метод Хаболта, θ-метод Вилсона и метод Ньюмарка [2]. В данной статье используется метод Ньюмарка как метод, обладающий лучшими характеристиками точности и устойчивости.
90
Стр. 90 |
ЭБ ПНИПУ (elib.pstu.ru) |