

2743
.pdf11
12

Пример. Для стороны хода т. 88 – т. 34 расчет дирекционного угла получается следующим образом:
101,85° + 180° – 134,42° → Т88–34 = 147,43°.
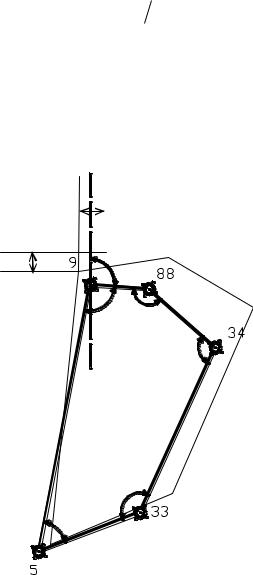
Контролем правильности вычислений дирекционных углов Т служит результат повторного получения дирекционного угла конечной стороны 9–88 (см. столбец 4 табл. 1.1).
1.3.5. Вычисление приращений координат
Приращения координат x и y определяют путем решения прямой геодезической задачи. Так как приращение – это проекция стороны на соответствующую ось координат плоскости, то используют формулы тригонометрии:
x = dcosT, |
y = dsinT, |
(1.6) |
где d – это горизонтальное проложение стороны хода, соответствующее данному направлению; Т – дирекционный угол стороны, переведенный в градусы.
Пример. Для стороны т. 9 – т. 88 исходные данные Т = 147,43°; d = 123,0 м.
Результаты вычислений x = –103,7 м; y = 66,2 м. Вычисленные приращения координат x и y по каждой
стороне хода записывают в столбцы 6 и 7 табл. 1.1.
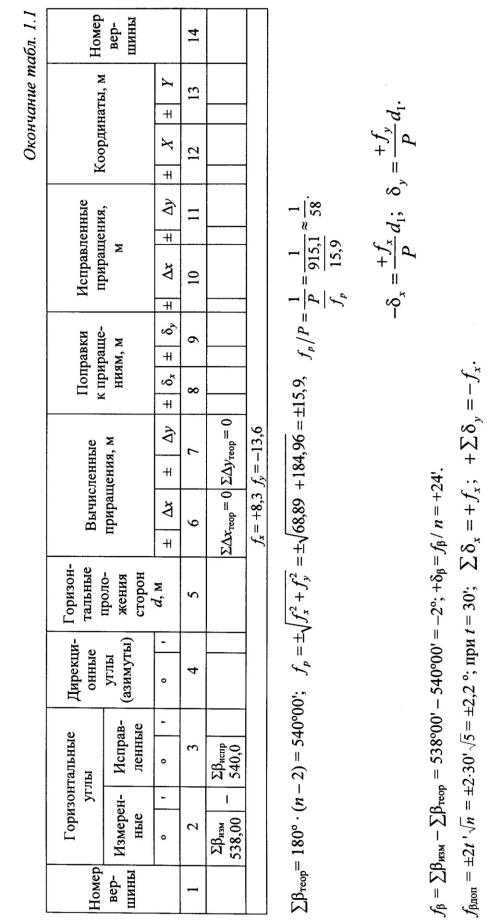
По окончании вычислений записывают суммы приращений координат x и y в столбцы 6 и 7 табл. 1.1.
1.3.6. Вычисление линейных невязок хода
Точность полевых измерений характеризуется определением абсолютной и относительной ошибок вычисления приращений координат.
Абсолютную невязку хода fp находят по формуле
|
|
|
|
fp |
fx2 fy2 , |
(1.7) |
|
где fx и fy – невязки в приращениях координат соответственно. Относительная невязка служит критерием точности проло-
женного теодолитного хода и для ее нахождения сумму длин сторон P = di делят на абсолютную невязку fp. Относительная не-
13
вязка – это отношение абсолютной невязки периметра хода fp к периметру теодолитного хода:
fp |
|
1 |
. |
(1.8) |
|
P |
P f p |
||||
|
|
|
Геометрическая сущность невязок fx, fy и fp состоит в том, что
при измерении горизонтальных углов и длин сторон d допущены ошибки. Невязки fx и fy показывают отклонения вычисленных координат конечного пункта пп. 9 от их фактического (теоретического) положения соответственно по осям X и Y (рис. 1.5).
Рис. 1.5. Графическое изображение невязки в замкнутом теодолитном ходе
Вычисляют невязки в приращениях координат замкнутого теодолитного хода:
fx xâû ÷ xòåî ð , fy yâû ÷ óòåî ð .
где xвыч и увыч – суммы приращений координат хода по осям
X и Y.
Координаты исходного пункта хода выдает преподаватель, они записываются в столбцы 12 и 13 ведомости.
14

Пример. Невязки fx и fy теодолитного хода, м:
fõ 8,3 (800,0 800,0) 8,3 0 8,3;
fó 13,6 (700,0 700,0) 13,6 0 13,6.
Находят абсолютную невязку теодолитного хода
fp 
 8,32 13,62 15,9 м.
8,32 13,62 15,9 м.
Невязки в приращениях координат позволяют определить относительную ошибку периметра хода по формуле
1 |
|
1 |
|
1 |
. |
|
P / fp |
915,1/15,9 |
58 |
||||
|
|
|
Относительная ошибка хода, проложенного на макете fp / P, должна быть:
fp |
|
1 |
. |
(1.9) |
|
P |
50 |
||||
|
|
|
Невязки fx и fy распределяют прямо пропорционально длинам
сторон. Полученные поправки xi и уi вводятся с обратным знаком невязки в приращения координат.
В процессе выполнения задания на макете местности можно одновременно прокладывать несколько вариантов.
Поправки приращений xi и уi вычисляются следующим образом:
– õ |
f |
x |
d |
; |
y |
|
fy |
d |
, |
(1.10) |
|
|
P |
||||||||
i |
P i |
|
i |
|
i |
|
|
|||
где di – длина стороны хода, для которой вычисляют поправку. Значения поправок записывают в столбцы 8 и 9 табл. 1.1 с
точностью до 0,1 м против соответствующих приращений координат.
При правильном вычислении поправок х и у их сумма должна равняться невязке с обратным знаком, т.е.
– õi fx ; |
yi fy . |
Исправленные приращения координат вычисляют по формулам:
õèñï ð õâû ÷ ( õ); |
óèñï ð óâû ÷ ( ó). (1.11) |
|
15 |
Значения исправленных приращений записывают в графы 10, 11 ведомости табл. 1.1.
Вычисления контролируют формулами:
õèñï ð õòåî ð ; |
óèñï ð óòåî ð. |
1.3.7. Вычисление координат вершин хода
Координаты X и Y точек 88, 34, 33, 5 и 9 хода вычисляют по следующему правилу: координата последующей точки равна координате предыдущей плюс алгебраически исправленное приращение координат между этими точками. Контролем правильности вычислений является получение координат конечной точки пп. 88, т.е. X88 = 800,0 м; Y88 = 700,0 м.
Контрольные вопросы
1.Назначение теодолитного хода (железнодорожной трассы).
2.Закрепление точек съемочного обоснования.
3.С какой точностью измеряются горизонтальные углы по трассе?
4.Угловая невязка и ее допустимость.
5.Принцип распределения угловой невязки.
6.Вычисление дирекционных углов.
7.Дайте определение понятия приращение координат.
8.Приращения координат, их вычисление.
9.Поясните формулы вычисления невязок приращений.
10.Увязка приращений координат.
11.Формула вычисления абсолютной невязки.
12.Вычисление относительной невязки.
13.Что характеризует допустимая относительная невязка?
14.Как распределяется невязка в приращениях координат?
15.Формула, контролирующая правильность распределения по-
правок в приращениях координат.
16.До какого знака вычисляются исправленные приращения?
17.С какой точностью вычисляются координаты конечного пунк-
та теодолитного хода?
2. УСТРОЙСТВО, ПРИНЦИП РАБОТЫ НИВЕЛИРА, МЕТОДИКА ИЗМЕРЕНИЙ И ОБРАБОТКА ДАННЫХ
Для проектирования линейных сооружений необходимо иметь топографический план, продольные и поперечные профили трассы.
В процессе полевых инженерно-геодезических изысканий создают высотное съемочное обоснование на участке строительства
16

и производят трассирование линейных сооружений: вынос на местность оси сооружения, закрепление трассы привязкой к местным предметам, съемку ситуации в полосе отвода, нивелирование пикетов, плюсовых и контурных точек и обработку полевых материалов.
Выполнение практического задания по нивелированию на макете рекомендуется в последовательности:
1)изучение процесса нивелирования на макете местности;
2)обработка материалов нивелирования сооружений линейного типа.
2.1. Процесс нивелирования на макете местности
Нивелирование на макете местности способствует пониманию процесса выполнения геодезических работ для определения высот точек земной поверхности в полевых условиях.
Выполняемая работа предусматривает обработку полевых материалов нивелирования линейных сооружений предварительно на макете местности.
Создание высотного обоснования съемочной сети на модели выполняется лазерным учебным нивелиром, представленным на рис. 2.1. Измеряя превышения между точками макета (рис. 2.2), определяют их отметки.
3
2
1
Рис. 2.1. Общий вид лазерного учебного нивелира (ЛУН-1)
17
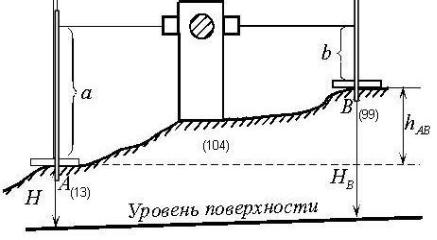
Рис. 2.2. Схема геометрического нивелирования на макете
2.1.1. Устройство лазерного нивелира
Основными частями нивелира служат: магнитная основа 1, балансир, кнопка Вкл/Выкл 2, лазер 3 и блок питания.
Лазерный луч нивелира, установленного на металлической основе, называемой станцией, задает горизонтальную линию визирования. Рейки с делениями размещают на нивелируемых точках и характерных линиях рельефа.
2.1.2. Описание лазерного нивелира
Технические данные:
–диаметр луча на выходе из зрачка – 0,5 мм;
–дальность действия луча визуальным методом на макете – 47 см;
–точность определения отсчета визуально – 0,5 мм;
–поворот в горизонтальной плоскости – 360 .
Физические характеристики лазерного нивелира:
–режим работы – непрерывно в течение 2 ч;
–расхождение луча на максимальном удалении – около 2 мм;
–оптические характеристики в нивелире отсутствуют;
–питание прибора осуществляется двумя батарейками АА;
–масса прибора – 500 г;
–масса учебной рейки – 86 г;
–высота – 113 мм, диаметр основания – 37 мм.
Во время работы лазерный нивелир устанавливают его магнитным основанием 2 на постоянно закрепленную металлическую точку-основу.
В рабочее положение визирная линия зрительной трубы 3 (лазерный луч) устанавливается компенсатором. Компенсатор за-
18

креплен на горизонтальной оси свободно в корпусе. Прибор прост в обращении и требует минимум навыков. Для хранения прибора отводится специальное место на металлической пластине.
В лазерном нивелире используется газовый лазер, задающий линию в горизонтальном направлении при помощи компенсатора. В процессе работы лазер излучает узконаправленный луч света, по которому выполняют отсчет по односторонней учебной рейке с миллиметровой шкалой с точностью до 0,5 мм.
2.1.3. Принцип работы лазерным учебным нивелиром
Создание высотного съемочного основания на макете местности может быть выполнено простым или сложным геометрическим нивелированием.
Лазерный учебный нивелир (ЛУН-1) предназначен для определения превышений между закрепленными на макете местности точками и передачи отметок способом геометрического нивелирования (рис. 2.3).
Рис. 2.3. Схема установки мини-приборов для определения превышения на макете
Сущность геометрического нивелирования (см. рис. 2.2) заключается в том, что нивелир устанавливают посередине между точками А и В. В точках А и В располагаются односторонние рейки. Видимый пучок света автоматически приводится в горизон-
19

тальное положение балансиром и позволяет визуально брать отсчет а по рейке, установленной в точке А(13), затем отсчет b по рейке, установленной в точке В(99). Превышение hAB определяется как разность отсчетов по рейкам:
hAB = a – b. |
(2.1) |
Точку, отметка которой известна, считают задней, а точку,
отметку которой определяют, – передней. Место постановки нивелира между задней и передней рейками называют станцией. Расстояние от станции до реек должно быть примерно равным.
На рис. 2.2 в местах постановки реек А и B и лазерного нивелира указаны номера (13), (99) и (104), соответствующие металлическим основам для установки мини-приборов (рис. 1.1 и 1.2).
Превышение h может быть как со знаком «+», так и со знаком |
|
«–». Если значение отметки HA в точке A известно и превышение |
|
h определено, то отметку точки B находят по формуле |
|
HB = HA + hAB. |
(2.2) |
2.1.4. Обработка материалов нивелирования на макете
Запись отсчетов и вычисление отметок приведены в табл. 2.1. По отсчетам задней и передней реек вычисляют превышения на станции нивелирования между точками макета по формуле (2.1). Подсчитывают сумму вычисленных превышений и определяют невязку fh в превышениях между твердыми точками:
fh = ∑hизм – ∑hтеор, |
(2.3) |
где fh – невязка нивелирного хода; ∑hизм – сумма измеренных превышений; ∑hтеор – сумма превышений теоретическая, вычисляемая по формуле
∑hтеор = Нкон – Ннач.
Здесь Нкон и Ннач – отметки конечной и начальной точек хода. Перед уравниванием нивелирного хода невязка fh сравнивает-
ся с допустимой невязкой fhдоп = ±10 мм 
 n . Поправка в превышение находится по формуле
n . Поправка в превышение находится по формуле
h |
fh |
, |
(2.4) |
|
|||
|
n |
|
|
гдения. h – поправка в превышение; n – число станций нивелирова-
20