

Основы проектирования сборочно-сварочных приспособлений
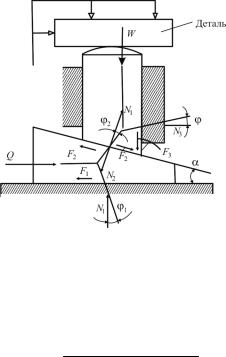
..pdfРис. 7.4. Схема действующих сил в эксцентрике при зажиме детали
Поскольку сила S мало отличается от нормальной силы W и, принимая S ≈ W, получим момент на рукоятке эксцентрика:
Q ·l = W[f·R + ρ + e(sinα′+ fcosα′)].
После подстановок, некоторого упрощения и преобразования полученного выражения получим упрощенную формулу Q ·l = W[Rsinφ + ρ + e·sin(α′+ φ)], и приняв во внимание, что R·sinφ = e – ρ, φ ≈ 6°, окончательно получим
Q ·l = W·е[1 + sin(α′+ φ)]. |
(7.4) |
Сила зажатия W детали из этого выражения |
|
W = Q ·l/(е[1+sin(α′+ φ)]. |
(7.5) |
Формула позволяет определять значения W или Q с точностью до 10 %.
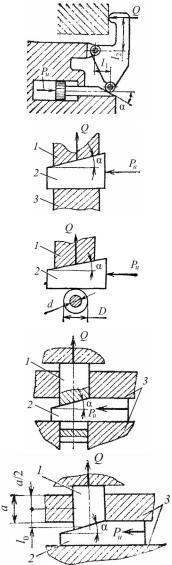
7.3. Клиновые зажимы
Наряду с винтовыми и эксцентриковыми клиновые зажимы применяют самостоятельно и как промежуточные звенья в сложных зажимных системах в сочетании с другими элемен-
91
тарными зажимами. Они позволяют увеличивать и изменять направление передаваемой силы. Для надежного закрепления заготовки в приспособлении клин должен быть самотормозящийся, т.е. зажимать заготовку после прекращения действия на клин исходной силы Q (рис. 7.5).
Рис. 7.5. Схема действия сил в односкосном клиновом механизме
При расположении передаваемых сил односкосным клиновым механизмом между силами W и Q получается зависимость
Q =W cosϕ3sin α ±(ϕ1 +ϕ2 ) . cosϕ1cos α ±(ϕ2 +ϕ3 )
Здесь знак «+» относится к закреплению клина, а знак «–» к откреплению его.
Самоторможение клина обеспечивается малыми углами α наклона его поверхности и получается при α < ϕ1 + ϕ2. Если ϕ1 = ϕ2 = ϕ3 = ϕ, то для односкосного клина при расположении передаваемой силы под прямым утлом зависимость между силами Q и W выражается формулами
92
Q = W tg(α ± 2ϕ). |
(7.6) |
W = Q / tg(α ± 2ϕ). |
(7.7) |
7.4. Рычажные зажимы
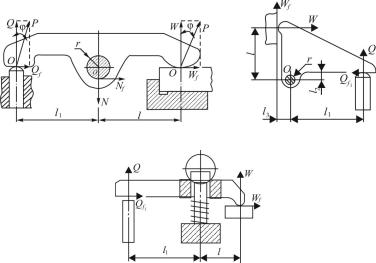
Рычажные зажимы аналогично клиновым применяются в сочетании с другими элементарными зажимами, образуя более сложные зажимные механизмы. При помощи рычага можно изменять величину и направление передаваемой силы, а также осуществлять одновременное и равномерное закрепление заготовки в двух местах. Наибольшее распространение в сборочных, сборочно-сварочных приспособлениях получили зажимные устройства с двухплечевым рычагом (рис. 7.6).
а |
б |
в
Рис. 7.6. Схема действия сил в рычажных зажимах приспособлений
Задачей расчета рычажного зажима является определение отношения между силой зажима детали W и исходной силой Q. Для определения этого отношения достаточно составить урав-
93

нения равновесия сил или моментов этих сил, действующих в рычажной системе.
Так, для рычага (рис. 7.6, а) уравнение равновесия моментов под действием сил Q, W, N и силы трения N·f относительно оси вращения О будет выглядеть следующим образом:
МО = Q l1 – N f r – W l = 0,
откуда
W = (Q l1 − N f r) l. |
(7.8) |
Силу N определим из уравнения равновесия сил на вертикальную ось:
∑ Ру = 0 = Q + W – N,
тогда
N = Q + W.
Подставив в формулу (7.8) вместо N ее значение, получим выражения для W и Q:
W =[Q(l1 − f )r)] (l + f )r), |
(7.9) |
Q =[W (l + f )r)] [(l1 − f )r)]. |
(7.10) |
Аналогично решается задача и для других рычажных зажимов. В частности, для зажимов, показанных на рис. 7.6, в, сила W определяется по формуле (7.8), а для зажима на рис. 7.6, б
W = [Q(l – l2)]/[(l + 1,4)l·r·f)].
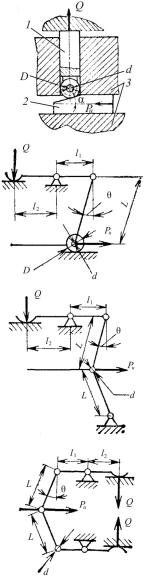
7.5. Комбинированные зажимы
Комбинированные зажимные устройства – устройства, состоящие из винтовых, клиновых, эксцентриковых в различных их комбинациях с рычажными. Рычаги прихватов для удобства установки заготовок выполняют передвижными и откидными. Эти устройства применяются для увеличения сил зажима, изменения величины хода зажимающего элемента, изменения направления сил зажима, уменьшения габаритов зажимного уст-
94
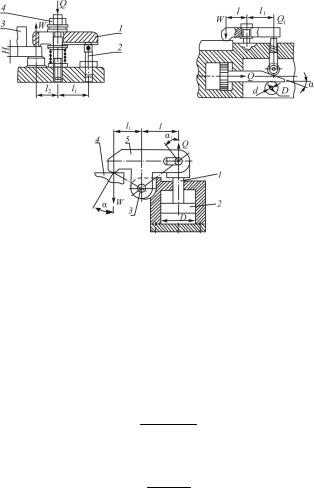
ройства в местах его контакта с заготовкой. Они приводятся в действие от ручного привода или от пневматических, гидравлических или иных силовых узлов. Схемы некоторых комбинированных зажимных устройств с ручным и пнематическим приводом показаны на (рис. 7.7).
а |
б |
в
Рис. 7.7. Комбинированные зажимные механизмы
На рис. 7.7, а показан один из видов нормализованных винтовых прихватов с передвижной прижимной планкой 1 и регулируемой опорой 2. Прихват применяют для крепления заготовок 3 с различными размерами Н. При завинчивании гайки 4 планка 1 зажимает заготовку 3. Величина исходной силы Q развиваемая винтом
Q = W (l1 +l2 ). l1η
Сила зажима
W = Q l1 η, l1 +l2
95

где η = 0,95 – к.п.д., учитывающий потери на трение между прижимной планкой 1 и ее опорой; при l1 = l2 и η = 1 сила зажи-
ма W = 0,5Q.
Для зажима на рис. 7.7, б определение соотношения между силой Q, развиваемой на штоке пневмоцилиндра, и силой W, зажимающей деталь, осуществляется последовательно: вначале определяется отношение между W и Q1 как для рычажной системы, и Q1 = W·l/l1, далее – отношение между Q и Q1.
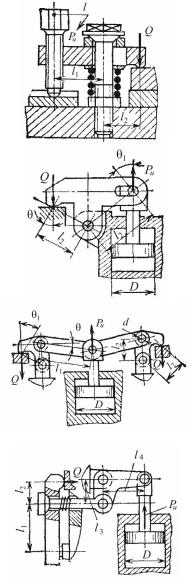
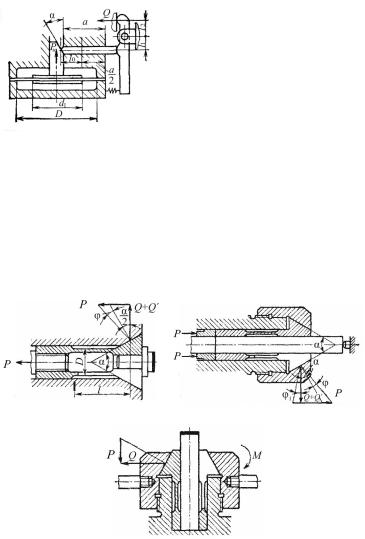
Наиболее распространенные схемы комбинированных зажимных устройств и расчетные формулы для расчета исходного усилия Ри и зажимного усилия Q представлены в табл. 7.1. Принятые в таблице обозначения: α – угол клина или угол подъема резьбы, град; φ1 – угол трения (tgφ1 = 0,1...0,15); ϕпр – приведенный угол трения между клином и роликом, град (tgϕпр = f (d/D) или в резьбе (ϕпр = 10°30'); d – диаметр резьбы винта, мм; Dн – наружный диаметр опорного торца гайки, мм; Dв – внутренний диаметр опорного торца винта, гайки, мм; α' = (180° – α), где α – угол поворота эксцентриситета от начального положения, град.
Таблица 7 . 1
Схемы и формулы для расчета комбинированных зажимых устройств
Схемы зажимных устройств |
Формулы для расчета |
|||||
|
P = |
rсрtg(α+ϕпр)l2 Q |
, |
|||
|
и |
|
|
l l1 η |
||
|
|
|
|
|||
|
|
Q = |
l l1 η Pи |
|||
|
|
rсрtg(α+ϕпр)l2 |
|
|||
|
|
|
|
|
|
|
96 |
|
|
|
|
|
|
|
Продолжение табл. 7 . 1 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Схемы зажимных устройств |
Формулы для расчета |
|||||||||||||||
|
P = |
rсрtg(α+ϕпр)l2 Q |
, |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
и |
|
|
|
|
|
l l1 η |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Q = |
|
|
|
|
l l1 η Pи |
|
|
|
|
|
|||||
|
rсрtg(α+ϕпр)l2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Pи |
= |
cosθ l2 Q |
, |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
cosθ1 l1 η |
|||||||||
|
Q = |
|
cosθ1 l1 η Pи |
|||||||||||||
|
|
|
|
|
|
cosθ l |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
P = |
2tg(θ+β)tgθ1 Q |
, |
|||||||||||||
|
|
|
|
|
|
|
||||||||||
|
и |
|
|
|
|
|
|
η |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Q = |
|
|
|
η Pи |
|
|
|
|
|
||||||
|
2tg(θ+β)tgθ1 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
l |
+l Q |
|
|
|
|
|
|
|
P = |
3(1 |
2 ) |
, |
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||||||
|
|
и |
|
|
|
|
|
l4 l1 η |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Q = |
l4 l1 η Pи |
|
|
|
|
|
|||||||||
|
|
|
l3(l1 +l2 ) |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
97 |
||||
Продолжение табл. 7 . 1
Схемы зажимных устройств |
Формулы для расчета |
||||||||||||||||||||||||
|
P = |
tgϕ1 + tg(α+ϕпр) |
|
l2 Q |
, |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
и |
|
|
|
|
1−tg(α+ϕпр) |
l1 η |
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
Q = |
|
|
1−tg(α+ϕпр) l1 η Pи |
|||||||||||||||||||||
|
tgϕ1 +tg(α+ϕпр) |
|
|
|
l2 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Pи =[tgϕ1 + tg(α+ϕ)]Q, |
||||||||||||||||||||||||
|
|
|
Q = |
|
|
|
|
Pи |
|
|
|
|
|
|
|||||||||||
|
|
|
|
tgϕ1 + tg(α+ϕ) |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Pи |
=[tgϕ1пр +tg(α+ϕ)]Q, |
|||||||||||||||||||||||
|
Q = |
|
|
|
|
|
|
Pи |
|
|
|
|
|
|
|||||||||||
|
tgϕ |
+ tg(α+ϕ) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1пр |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
P = |
|
tgϕ1 + tg(α+ϕ) |
Q, |
|||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
и |
|
|
|
|
1−tg(α+ϕ)tgϕ2 |
|
|
|
|
|
|
|||||||||||||
|
Q |
= |
1− tg(α+ϕ)tgϕ2 |
|
P |
||||||||||||||||||||
|
|
tgϕ1 + tg(α+ϕ) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
и |
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
P = |
|
tgϕ1 + tg(α+ϕ) |
|
|
|
Q, |
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
и |
|
|
|
|
|
|
|
3l0 |
tg(α+ϕ)tgϕ2 |
|||||||||||||||
|
|
|
|
1− |
|||||||||||||||||||||
|
|
|
|
|
a |
||||||||||||||||||||
|
|
|
|
|
1− |
3l0 |
tg(α+ϕ)tgϕ2 |
||||||||||||||||||
|
|
|
|
|
a |
||||||||||||||||||||
|
Q = |
|
Pи |
||||||||||||||||||||||
|
tgϕ1 + tg(α+ϕ) |
||||||||||||||||||||||||
98
Продолжение табл. 7 . 1
Схемы зажимных устройств |
Формулы для расчета |
|||||||||||||||||||
|
P = |
tgϕ1 + tg(α+ϕпр) |
Q, |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
и |
1−tg(α+ϕпр)tgϕ2 |
|
|
|
|||||||||||||||
|
Q = |
1−tg(α+ϕпр)tgϕ2 |
P |
|||||||||||||||||
|
tgϕ1 + tg(α+ϕпр) |
|||||||||||||||||||
|
|
|
|
и |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
P = |
tgϕ1пр + tg(θ+β) |
|
|
l2 Q |
, |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
и |
|
|
|
η |
|
|
|
|
|
|
|
|
|
l1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Q = |
|
|
|
|
|
η |
|
|
|
|
|
|
l1 Pи |
||||||
|
tgϕ1пр + tg(θ+β) |
|
|
|
l2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
P = |
|
|
2tg(θ+β) |
|
|
l2 Q |
, |
|
|
|
|||||||||
|
и |
|
|
|
η |
|
|
l1 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Q = |
|
|
η |
|
|
l1 Pи |
|
|
|
||||||||||
|
|
2tg(θ+β) |
|
|
l2 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
P = |
2tg(θ+β) |
|
|
l2 Q |
, |
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||||||
|
и |
|
|
|
η |
|
|
l1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Q = |
|
η |
|
|
l1 Pи |
|
|
|
|||||||||||
|
2tg(θ+β) |
|
|
l2 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
99
Окончание табл. 7 . 1
Схемы зажимных устройств |
|
Формулы для расчета |
|
|
||||||||||
|
P = |
|
|
tgϕ1 + tg(α+ϕ) |
|
|
l2Q |
, |
|
|||||
|
|
|
|
3l0 |
|
|
l η |
|||||||
|
и |
|
|
|
|
|
|
|
||||||
|
|
|
1− |
|
|
tg(α+ϕ)tgϕ2 |
1 |
|
|
|||||
|
|
|
a |
|
|
|||||||||
|
1 |
− |
3l0 |
tg(α+ϕ)tgϕ2 |
l |
P η |
||||||||
|
|
|||||||||||||
|
Q = |
|
|
|
a |
1 |
и |
|
|
|||||
|
|
|
tgϕ1 + tg(α+ϕ) |
|
|
|
l2 |
|
|
|||||
7.6. Центрирующие зажимы
При базировании деталей с помощью наружных или внутренних цилиндрических (многогранных) поверхностей применяют центрирующие зажимные элементы: цанги, разжимные оправки, двух- и трехкулачковые патроны. Различные конструкции цанг, представляющие собой разрезные пружинящие гильзы, показаны на рис. 7.8.
а |
б |
в
Рис. 7.8. Типы цанговых зажимных устройств
100