

Промышленные роботы Ч. 3 учебное пособие
.pdfРис. 75. Дистанционно управляемый робот «Гладиатор»
Полуавтономные «Гладиаторы» – это разведчики, способные выявить обнаруженные ими опасности и предупредить о заминированных участках, ловушках, химическом, биологическом или ядерном заражении местности. Весить «Гладиатор» будет около 3 т, однако должен умещаться в военном джипе Humvee для транспортировки. Управлять роботом с помощью джойстика будет оператор в специальном шлеме с окуляром, позволяющим видеть ситуацию глазами-камерами машины. В конечном счете военные планируют снабдить «Гладиаторов» каким-либо вооружением.
Робот располагает электромотором и аккумуляторами, которые заряжает дизель-генератор. Для обеспечения бесшумного движения дизель останавливается, и в ход идет запас энергии в батареях, что позволяет «Гладиатору» действовать скрытно. Максимальная скорость робота на асфальте 26 км/ч, по бездорожью – примерно в два раза ниже. Ему по силам пересечь траншею шириной 1 м, а также водную преграду глубиной 70 см.
91
V. КОСМИЧЕСКИЕ РОБОТЫ
Неоспоримое преимущество роботов в космических исследованиях заключается в том, что автоматы не нуждаются в еде, питье и способны работать в крайне неблагоприятных условиях. Косморобот – мобильная система, способная манипулировать объектами и достаточно универсальная, чтобы выполнять любой набор подобных заданий автономно или под дистанционным контролем. Задача космических роботов заключается в исполнении определенного цикла операций: установить или направить прибор для проведения измерений, собрать образцы для исследования, собрать некую конструкцию или даже обеспечить астронавта средством передвижения.
Космороботы должны отвечать следующим требованиям: хорошо переносить запуск; функционировать в сложных условиях враждебной среды, зачастую на большом удалении; весить как можно меньше, так как каждый килограмм, выведенный на орбиту, стоит дорого; потреблять мало энергии и иметь долгий срок службы; работать в автоматическом режиме; обладать чрезвычайной надежностью.
5.1. Виды космических роботов
Самые распространенные из автоматических аппаратов, использующихся в космических исследованиях, – это роверы (луноходы, марсоходы). Такой робот может передвигаться по поверхности другой планеты, неся на борту научные приборы. Как правило, и сам ровер, и научное оборудование на нем функционируют в автоматическом режиме.
Например, бортовой манипулятор космического корабля «Буран» предназначен для выгрузки спутников из грузового отсека корабля и установки их на орбите, снятия с орбиты и укладки их в грузовой отсек корабля.
Робот-луноход, разработанный учеными армии Китая, предназначен для транспортировки и монтирования технического оборудования, сбора образцов минералов, поиска следов существования воды или льда.
К космическим роботам относятся также современные спутники дистанционного зондирования (ДЗ) Земли, представляющие собой сложные интеллектуальные технические устройства, четко и слаженно выполняющие команды и программы по съемке объектов и районов земной поверхности.
92

Главная часть космического аппарата – специальная приемная аппаратура, способная сфокусировать, принять и преобразовать в изображение электромагнитную энергию объектов наблюдения.
Помимо этого аппарат ДЗ включает системы, необходимые для управления спутником (навигационные приборы, датчики углового положения, гироскопы), а также системы электропитания и обеспечения функционирования в условиях больших перепадов температур. При этом вес аппаратов может достигать
10–15 т.
Располагаются современные спутники ДЗ в околоземном пространстве на орбитах высотой от 200 до 1000 км, за исключением геостационарных метеоспутников, находящихся на высоте около 35 тыс. км над землей.
С помощью фотоспутников осуществляется исследование природных ресурсов Земли; составление и обновление топографических карт и фотопланов; поиск объектов, выявление закономерностей их расположения, наблюдение за динамикой объектов, определение их назначения и признаков функционирования.
Роботизированный комплекс «Декстре» (рис. 76) состоит из двух «рук», каждая из которых имеет по семь сочленений. Контролировать их можно с помощью четырех видеокамер.
Рис. 76. Роботизированный комплекс «Декстре»
Манипулятор предназначен для выполнения работ, которые проводятся сейчас только во время выходов экипажа станции в открытый космос.
Марсоход Spirit (рис. 77) оснащен обширным спектром оборудования для научных исследований. На борту аппарата находится панорамная камера, позволяющая делать подробные снимки марсианского ландшафта, оснащенный камерой микроскоп для изучения строения грунта и горных пород и три спек-
93
трометра: термоэмиссионный, мессбауэровский и рентгеновский на альфачастицах. Помимо этого, у марсохода имеются специальные манипуляторыбуры, позволяющие снять верхний слой горных пород для изучения их внутреннего строения.
Рис. 77. Марсоход Spirit
Мощность бортовых компьютеров марсохода значительно выросла. В частности, конструкторы существенно увеличили объем памяти. Spirit может накапливать в своей памяти данные за продолжительные периоды наблюдений. Важно и то, что в конструкции Spirit реализована система автономной навигации, т.е. марсоход может самостоятельно, без помощи оператора, находить оптимальную траекторию движения.
5.2.Разработка модели управления космороботом
Вкосмических роботах применяется дискретно-позиционное управление. Сущность дискретно-позиционного управления роботом сводится к сле-
дующему (рис. 78).
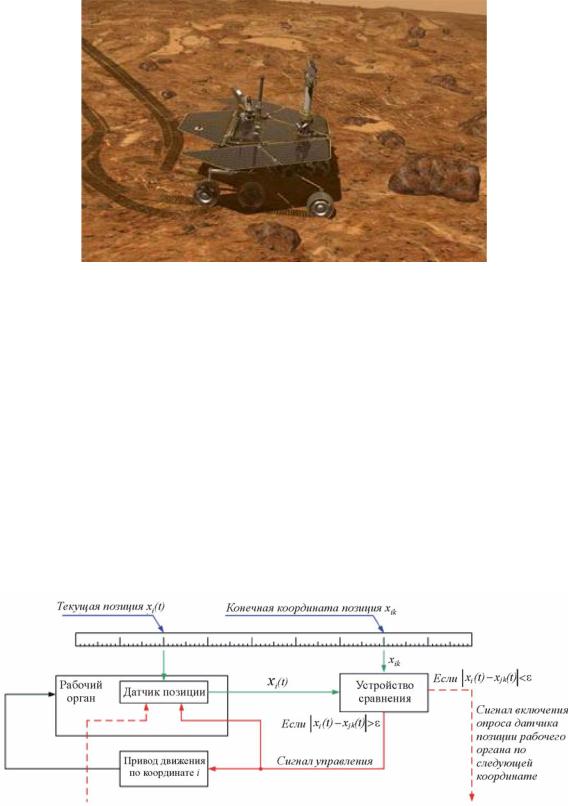
Рис. 78. Общая схема-модель системы управления
94
Сигнал с аналогового датчика, «пропорциональный» текущей координате (позиции) нахождения рабочего органа робота, через определенный промежуток времени (период опроса) поступает на устройство сравнения. Затем устройство сравнения сигналов производит анализ рассогласования поступившего сигнала (текущей координаты) со значением конечной точки позиционирования (конечной координаты).
Если рассогласование значительно (выше разрешающей способности устройства сравнения), то на исполнительный орган робота (привод) поступает управляющий сигнал, направленный на ликвидацию рассогласования двух величин, т.е. на перемещение рабочего органа в сторону конечной координаты; по прошествии времени, равного периоду дискретизации, последовательность повторяется.
Если рассогласование незначительно (не регистрируется устройством сравнения), то сигнал на перемещение рабочего органа не выдается, а управление передается следующему контуру (например, управляющему движением по другой степени свободы).
Помимо указанных сигналов в системе существует и общий сигнал управления, отвечающий за включение робота.
Работа системы управления описывается с помощью следующих уравнений: u1(t1 ) 1; u1s (t1 ) 0; x1(t1 ) x1 0 ;
|
x (t |
j |
) x (t |
j 1 |
) k t; |
|
|
||||||
|
1 |
|
|
|
1 |
1 |
|
|
|
|
|
||
|
u1(t j ) 1; |
|
ï ðè |
|
x1(t j 1 ) x1k |
|
; |
||||||
|
u |
|
(t |
j |
) 0; |
|
|
|
|
|
|
|
|
1s |
|
|
|
|
|
|
|
|
|
|
|||
|
x1(t j ) x1(t j 1 ); |
|
|
||||||||||
|
|
|
|||||||||||
|
|
(t j ) 0; |
|
ï ðè |
|
x1(t j ) x1k |
|
, |
|||||
|
|
|
|||||||||||
|
u1 |
|
|
|
|||||||||
|
u |
|
(t |
j |
) 1; |
|
|
|
|
|
|
|
|
|
1s |
|
|
|
|
|
|
|
|
|
|
||
где t1, tj, tj–1 – значение дискретного времени в первый, текущий и предыдущий моменты соответственно; t – период опроса датчика; и1(tj), и1s(tj) – значения управляющих сигналов внутри системы управления первой степенью свободы и между 1-й и s-й степенями свободы соответственно; x1(t1), x1(tj-1), x1(tj) – положение рабочего органа робота в соответствующие моменты времени; x10, x1k – начальное положение рабочего органа робота и терминальная точка позиционирования; ε – точность измерения (точность сравнения); k1 – скорость перемещения рабочего органа по 1-й степени подвижности.
95
Первые уравнения описывают начальное состояние системы, а последующие – поведение системы во времени в зависимости от показаний позиционного датчика.
5.3.Современные спутниковые системы навигации
5.3.1.Устройство спутниковых систем навигации
Спутниковая система навигации – комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты), точного времени в конкретной точке, а также параметров движения (скорости и направления движения и т. д.) наземных, водных и воздушных объектов.
Основные элементы спутниковой системы навигации:
–орбитальная группировка, состоящая из нескольких (от 2 до 30) спутников, излучающих специальные радиосигналы;
–наземная система управления и контроля, включающая блоки измерения текущего положения спутников и передачи на них полученной информации для корректировки информации об орбитах;
–приемное клиентское оборудование («спутниковые навигаторы»), используемое для определения координат;
–информационная радиосистема для передачи пользователям поправок,
позволяющих значительно повысить точность определения координат. Принцип работы спутниковых систем навигации основан на измерении
расстояния от антенны на объекте (координаты которого необходимо получить) до спутников, положение которых известно с большой точностью. Таблицей положений всех спутников, называемой альманахом, должен располагать любой спутниковый приемник до начала измерений. Обычно приемник сохраняет альманах в памяти со времени последнего выключения и, если он не устарел, мгновенно использует его. Каждый спутник передает в своем сигнале весь альманах. Таким образом, зная расстояния до нескольких спутников системы, с помощью обычных геометрических построений на основе альманаха можно вычислить положение объекта в пространстве.
Метод измерения расстояния от спутника до антенны приемника основан на определенности скорости распространения радиоволн. Для осуществления
96
возможности измерения времени распространения радиосигнала каждый спутник навигационной системы излучает сигналы точного времени, используя точно синхронизированные с системным временем атомные часы. При работе спутникового приемника его часы синхронизируются с системным временем, и при дальнейшем приеме сигналов вычисляется задержка между временем излучения, содержащимся в самом сигнале, и временем приема сигнала. Располагая этой информацией, навигационный приемник вычисляет координаты антенны. Для получения информации о скорости большинство навигационных приемников используют эффект Доплера. Дополнительно накапливая и обрабатывая эти данные за определенный промежуток времени, возможно вычислить такие параметры движения, как скорость (текущую, максимальную, среднюю), пройденный путь и т.д.
В реальности работа системы значительно сложнее. Ниже перечислены некоторые проблемы, требующие специальных технических приемов для их решения:
–отсутствие атомных часов в большинстве навигационных приемников. Этот недостаток обычно устраняется требованием получения информации не менее чем с трех (2-мерная навигация при известной высоте) или четырех (3-мерная навигация) спутников (при наличии сигнала хотя бы с одного спутника можно определить текущее время с хорошей точностью);
–неоднородность гравитационного поля Земли, влияющая на орбиты спутников;
–неоднородность атмосферы, из-за которой скорость и направление распространения радиоволн могут меняться в определенных пределах;
– отражения сигналов от наземных объектов, что особенно заметно
вгороде;
–невозможность разместить на спутниках передатчики большой мощно-
сти, из-за чего прием их сигналов возможен только в прямой видимости на открытом воздухе.
5.3.2.Характеристика навигационных спутниковых систем в мире
Внастоящее время работают или готовятся к развертыванию следующие системы спутниковой навигации:
– NAVSTAR (GPS). Принадлежит министерству обороны США, что считается другими государствами ее главным недостатком. Более известна под на-
97
званием GPS. Единственная полностью работающая спутниковая навигационная система;
– ГЛОНАСС. Находится на этапе развертывания спутниковой группировки. Принадлежит министерству обороны России. Обладает, по заявлениям разработчиков, некоторыми техническими преимуществами по сравнению с NAVSTAR, однако в настоящее время эти утверждения проверить невозможно ввиду недостаточности спутниковой группировки и отсутствия доступного клиентского оборудования;
–Бэйдоу – развертываемая в настоящее время Китаем подсистема GNSS, предназначенная для использования только в этой стране. Ее особенность – небольшое количество спутников, находящихся на геостационарной орбите.
–Galileo – европейская система, находящаяся на этапе создания спутниковой группировки.
Рассмотрим некоторые особенности основных систем спутниковой навигации (NAVSTAR и ГЛОНАСС).
Обе системы имеют двойное назначение – военное и гражданское, поэтому излучают два вида сигналов: один с пониженной точностью определения координат (~100 м) для гражданского применения и другой высокой точности (~10–15 м и точнее) для военного применения. Для ограничения доступа к точной навигационной информации вводят специальные помехи, которые могут быть учтены после получения ключей от Военного ведомства США. В настоящее время эти помехи отменены, и точный сигнал доступен гражданским приемникам, однако в случае соответствующего решения государственных органов стран-владельцев военный код может быть снова заблокирован.
Спутники NAVSTAR располагаются в шести плоскостях на высоте примерно 20 180 км. Спутники ГЛОНАСС (шифр «Ураган») находятся в трех плоскостях на высоте примерно 19 100 км. Номинальное количество спутников
вобеих системах – 24. Группировка NAVSTAR полностью укомплектована
вапреле 1994 г. и с тех пор поддерживается, группировка ГЛОНАСС была полностью развернута в декабре 1995 г., но с тех пор значительно деградировала. В настоящий момент идет ее активное восстановление.
Обе системы используют сигналы на основе «псевдошумовых последовательностей», применение которых придает им высокую помехозащищенность и надежность при невысокой мощности излучения передатчиков.
98
В соответствии с назначением в каждой системе есть две базовые частоты: L1 (стандартной точности) и L2 (высокой точности). Для NAVSTAR L1=1575,42 МГц и L2=1227,6 МГц. В ГЛОHАСС используется частотное разделение сигналов, т. е. каждый спутник работает на своей частоте, поэтому L1 находится в пределах от 1602,56 до 1615,5 МГц и L2 в пределах от 1246,43 до 1256,53 МГц. Сигнал на частоте L1 доступен всем пользователям, сигнал на частоте L2 – только военным (т.е. не может быть расшифрован без специального секретного ключа).
Каждый спутник системы, помимо основной информации, передает также вспомогательную, необходимую для непрерывной работы приемного оборудования. В эту категорию входит полный альманах всей спутниковой группировки, передаваемый последовательно в течение нескольких минут.
Таким образом, старт приемного устройства может быть достаточно быстрым (порядка 1 мин), если он содержит актуальный альманах (это называется «теплый старт»), но может занять и до 15 мин, если приемник вынужден получать полный альманах («холодный старт»). Необходимость в «холодном старте» возникает обычно при первом включении приемника, а также если он долго не использовался.
5.4. Российская система глобального позиционирования ГЛОНАСС
Глобальная навигационная спутниковая система (ГЛОНАСС) – российская спутниковая система навигации. Основой системы должны стать 24 спутника, движущихся над поверхностью Земли в трех орбитальных плоскостях с наклонением 64,8° на высоте 19100 км.
5.4.1.ГЛОНАСС сегодня
Вчисле действующих космических аппаратов (КА) в настоящее время находится одиннадцать спутников «ГЛОНАСС-М», имеющих гарантийный срок активного существования 7 лет. Эти спутники излучают, в отличие от аппаратов предыдущего поколения, уже по два сигнала для гражданских потребителей.
Всоответствии с поручением Президента Российской Федерации минимальная группировка из 18 спутников была развернута в 2008 г. Полная группировка в составе 24 спутников в соответствии с федеральной целевой про-
граммой |
«Глобальная навигационная система» должна быть развернута |
в 2010 г. |
|
99
Спутники «ГЛОНАСС-М» в составе орбитальной группировки будут находиться, как минимум, до 2015 г. Летные испытания негерметичных спутников нового поколения «ГЛОНАСС-К» с улучшенными характеристиками (увеличенным до 10 лет гарантийным сроком и третьей частотой L-диапазона для гражданских потребителей) должны начаться в 2009 г. Этот спутник будет вдвое легче своего предшественника (примерно 700 кг против 1415 кг у спутника «ГЛОНАСС-М»).
В дальнейшем, после развертывания орбитальной группировки из 24 КА, для ее поддержания потребуется делать по одному групповому пуску в год двух КА «ГЛОНАСС-К» на носителе «Союз», что существенно снизит эксплуатационные расходы.
5.4.2. Эксплуатация ГЛОНАСС
Для построения автокоридора безопасности на федеральной магистрали Москва – Дон используется навигационно-мониторинговая система защиты автотранспортных средств и перевозимых грузов «Алмаз». Она функционирует на базе российской спутниковой технологии ГЛОНАСС.
Система позволяет в режиме реального времени вести наблюдения за объектом, на котором установлен маячок: местом расположения, скоростью движения, состоянием охранной и тревожной сигнализации. Когда машина выходит из зоны ответственности одного диспетчерского центра, она последовательно передается на охранное обслуживание другому. Таким образом, «Алмаз» аккумулирует сведения обо всей траектории перемещения объекта.
Диспетчерский центр этой системы был развернут на пункте вневедомственной охраны Центрального района г. Тулы. Первые испытания прошли успешно. По «легенде», охраняемый автомобиль угнали со стоянки на одной из городских улиц. Машина была оснащена терминальным устройством «Титан10». Диспетчер принял сигнал «Тревога», который был передан на центральный пункт МКЦ МВД России. Оттуда информация поступила во все наряды милиции вневедомственной охраны райотделов, расположенных вдоль трассы Москва – Дон. За передвижением угнанного автомобиля на мониторе компьютера наблюдал диспетчер. Когда машина остановилась у заправки на окраине г. Богородицка, ее блокировали оперативники.
В скором времени большинство российских дорог окажутся в зоне действия новой системы. По утверждению специалистов, она обладает высокой
100