

Математическая обработка результатов геодезических измерений
..pdf№ точек
А
1
2
3
4
В
Горизонтальные углы
174 28
205 29
174 44
203 07
Поправка
|
|
|
|
|
|
|
Таблица 5.1 |
||
|
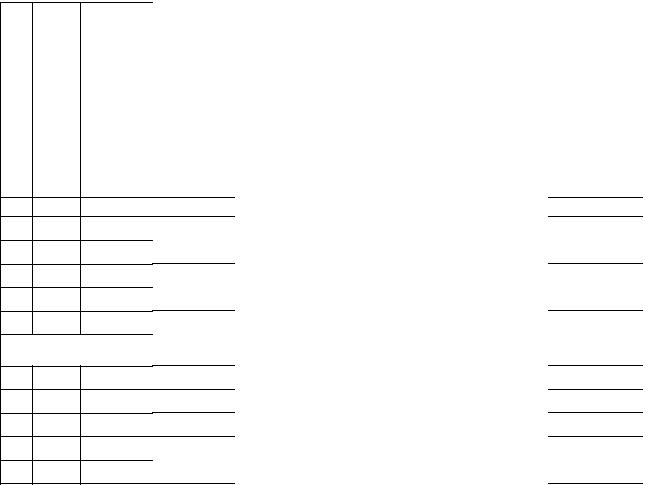
Ведомость вычисления координат точек теодолитного хода |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Исправ- |
Дирекци- |
Горизон- |
Приращения |
Исправленные |
|
|
|||
приращения |
Координаты |
||||||||
ленные |
онные |
тальные |
координат |
||||||
координат |
|
|
|||||||
углы |
углы |
проложения |
|
|
|
|
|||
Х |
Y |
Х |
Y |
Х |
Y |
||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
221 14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1234,23 |
3987,64 |
||
|
|
|
|
|
|
|
|||
|
|
142,31 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
132,91 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
122,88 |
|
|
|
|
|
|
|
|
|
|
|
|
|
903,07 |
3780,96 |
||
|
|
|
|
|
|
|
|||
|
183 27 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Р = |
|
|
|
|
|
|
|
101
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5.2 |
|
|
|
|
Ведомость вычисления отметок точек теодолитного хода |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Гори- |
Направление |
|
Направление |
|
|
Среднее |
|
|
|
||
|
зон- |
прямое |
|
обратное |
Превы- |
|
По- |
Превы- |
|
|||
№точек |
|
Превы- |
превы- |
Отметки |
||||||||
|
Высо- |
|
|
|
||||||||
таль- |
Угол |
|
Угол |
|
шение |
шение |
шение со |
прав- |
шение |
точек теодо- |
||
ные |
та ин- |
|
Высота |
исправ- |
||||||||
проло- |
накло- |
стру- |
|
накло- |
инстру- |
прямое, |
обратное, |
знаком |
ка, |
ленное, |
литного хо- |
|
|
жения, |
на, |
мента, |
|
на, |
мента, i |
h1 |
h2 |
прямого, |
h |
hиспр |
да, Н |
|
|
|
|
hср |
|
|
||||||
|
d |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
|
121,06 |
142,31 |
1 33 |
1,69 |
|
–0 23 |
1,41 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||||
2 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
132,91 |
+2 39 |
1,60 |
|
–1 28 |
1,65 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
122,88 |
+1 36 |
1,68 |
|
–0 15 |
1,44 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
4 |
|
|
|
|
|
|
130,49 |
|||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
102
|
|
|
Таблица 5.3 |
|
Ведомость тахеометрической съемки |
Вариант |
|
9 сентября 2008 г. |
Станция Отметка станции |
МО = 0 05 Высота инструмента i = 1,69 м; V = i |
|
№ станции |
точек визирования |
|
№ |
12
III 1 2 3 4
II III
5
6
7
8
Рас- |
|
|
|
|
|
|
|
|
|
|
|
|
|
стоя- |
|
Отсчеты |
Гори- |
Отсчеты |
|
Гори- |
|
|
Оконча- |
Отмет- |
|
||
ние |
|
по гори- |
по вер- |
Угол |
Превы- |
Вы- |
|
||||||
(изме- |
|
зон- |
зон- |
тельное |
ки ре- |
|
|||||||
рено |
|
зон- |
таль- |
тикаль- |
накло- |
тальное |
шение, |
сота |
превы- |
ечных |
Кроки |
||
|
тально- |
ному |
на, |
вехи, |
|||||||||
даль- |
|
ный |
проло- |
h |
шение, |
точек, |
|
||||||
|
му кру- |
кругу |
|
V |
|
||||||||
номе- |
|
угол |
жение, d |
|
h |
Н |
|
||||||
ром) |
|
гу |
|
КЛ |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
4 |
|
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
59,59 |
|
0 00 |
|
|
|
|
|
|
|
|
|
||
|
41 |
42 |
|
3 27 |
|
|
|
|
|
|
|
||
63,92 |
|
75 |
22 |
|
4 05 |
|
|
|
|
|
|
|
|
51,04 |
|
308 |
05 |
|
3 32 |
|
|
|
|
|
|
|
|
50,27 |
|
281 |
08 |
|
2 19 |
|
|
|
|
|
|
|
|
Станция |
|
II Отметка |
станции |
______ |
МО = 0 |
05 Высота |
инструмента |
i = 1,60 м; V = i |
|
|
|||
62,15 |
|
0 00 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
28 |
16 |
|
5 47 |
|
|
|
|
|
|
|
||
36,19 |
|
54 |
33 |
|
2 49 |
|
|
|
|
|
|
|
|
43,37 |
|
318 |
35 |
|
8 37 |
|
|
|
|
|
|
|
|
57,20 |
|
261 |
35 |
|
2 37 |
|
|
|
|
|
|
|
|
103
|
|
|
|
|
Ведомость тахеометрической съемки |
|
Вариант |
Окончание табл. 5.3 |
||||||||
|
|
|
|
|
|
|
|
|
||||||||
«9» сентября 2008 г. |
Станция Отметка станции |
МО = 0 05 Высота инструмента i = 1,68 м; V = i |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
станции№ |
визированияточек |
Рас- |
гу |
угол |
КЛ |
|
|
жение, d |
|
|
h |
|
Н |
|
||
номе- |
|
|
|
|
|
|
||||||||||
|
|
стоя- |
Отсчеты |
Гори- |
Отсчеты |
|
|
Гори- |
|
|
Оконча- |
|
Отмет- |
|
||
|
|
ние |
по гори- |
по вер- |
Угол |
|
Превы- |
Вы- |
|
|
||||||
|
|
(изме- |
зон- |
|
зон- |
тельное |
|
ки ре- |
|
|||||||
|
|
рено |
зон- |
таль- |
тикаль- |
накло- |
|
тальное |
шение, |
сота |
превы- |
|
ечных |
Кроки |
||
|
|
тально- |
ному |
на, |
|
вехи, |
|
|||||||||
|
|
даль- |
ный |
|
проло- |
h |
шение, |
|
точек, |
|
||||||
|
|
му кру- |
кругу |
|
|
V |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
№ |
ром) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
9 |
|
|
|
|
|
|
1 |
2 |
3 |
|
|
5 |
6 |
7 |
|
8 |
10 |
11 |
|
12 |
13 |
||
III |
IV |
|
0 00 |
|
|
|
|
|
|
|
|
|
|
|
||
|
9 |
48,59 |
21 |
53 |
|
2 46 |
|
|
|
|
|
|
|
|
|
|
|
10 |
57,62 |
68 |
04 |
|
4 40 |
|
|
|
|
|
|
|
|
|
|
|
11 |
41,74 |
277 |
37 |
|
5 13 |
|
|
|
|
|
|
|
|
|
|
|
12 |
48,34 |
244 |
59 |
|
3 15 |
|
|
|
|
|
|
|
|
|
|
|
|
Станция |
IV Отметка станции _______ МО= 0 05 Высота инструмента i = 1,44 м; V = i |
|
||||||||||||
|
|
|
0 00 |
|
|
|
|
|
|
|
|
|
|
|
||
IV |
B |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
13 |
31,10 |
13 |
08 |
|
4 27 |
|
|
|
|
|
|
|
|
|
|
|
14 |
49,69 |
65 |
27 |
|
2 57 |
|
|
|
|
|
|
|
|
|
|
|
15 |
52,09 |
315 |
44 |
|
3 10 |
|
|
|
|
|
|
|
|
|
|
|
16 |
37,04 |
282 44 |
|
1 38 |
|
|
|
|
|
|
|
|
|
||
104

5.1. Вычисление координат точек разомкнутого теодолитного хода (планово-высотного съемочного обоснования)
Для примера результаты измерений и вычислений приведены в табл. 5.1 и 5.4.
5.1.1. Уравнивание угловых измерений
Уравнивание – это процесс математической обработки, в результате которой вычисляется и распределяется невязка.
Разность между суммой измеренных углов и теоретической суммой называется угловой невязкой хода и обозначается f .
Угловая невязка хода f вычисляется по формуле:
f изм теор ,
где изм – сумма измеренных углов хода; теор – теоретическая сумма углов.
Теоретическая сумма углов вычисляется по формулам в зависимости от геометрии хода.
Для разомкнутого теодолитного хода теоретическая сумма углов вычисляется:
для измеренных горизонтальных углов левых по ходу:
теор К Н 180 n ;
для измеренных горизонтальных углов правых по ходу:
теор Н К 180 n ,
где Н – дирекционный угол начальной стороны; К – дирекционный угол конечной стороны.
Вычисленная угловая невязка f сравнивается с допустимой f доп f доп t n ,
n ,
где t – точность отсчитывания по горизонтальному кругу теодолита; n – число измеренных углов.
Сравниваются фактическая и допустимая невязки.
Если вычисленная невязка f больше допустимой f доп, то необходимо все пересчитать.
Если вычисленная невязка меньше или равна допустимой f f доп ,
то вычисленная угловая невязка распределяется на измеренные углы поровну (но не меньше, чем точность отсчитывания или 0,5 ) с обратным знаком, т.е.
105
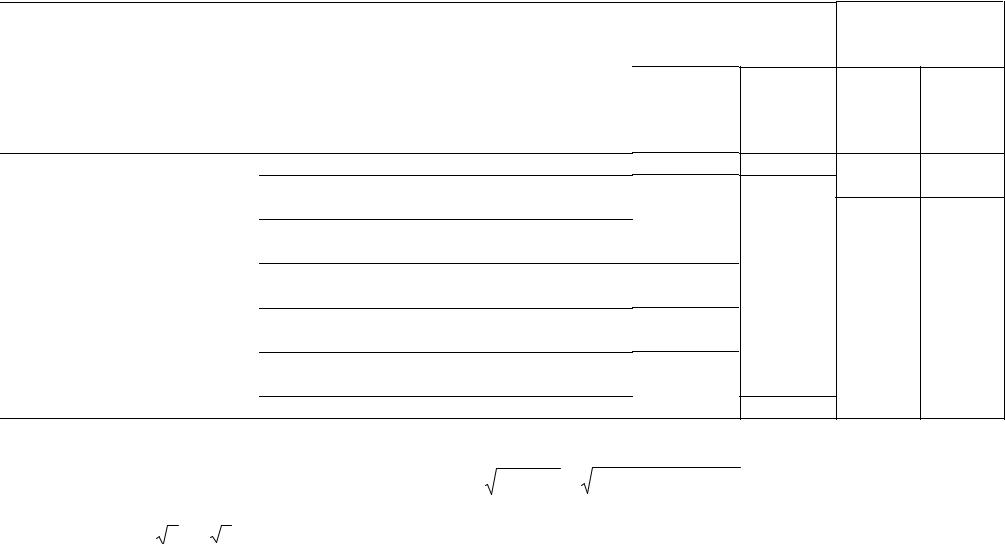
Таблица 5.4
Ведомость вычисления координат точек теодолитного хода
|
Изме- |
|
|
|
точек№ |
ренные |
Поправка |
углы |
|
тальные |
||||
|
гори- |
|
|
Исправ- |
|
зон- |
|
|
ленные |
|
|
|
|
|
|
углы |
|
|
|
А |
|
|
|
|
|
|
|
|
|
1 |
174 |
28 |
|
174 28 |
|
|
|
|
|
2 |
205 |
29 |
|
205 29 |
|
|
|
|
|
3 |
174 |
44 |
|
174 44 |
|
|
|
|
|
4 |
203 |
07 |
–1 |
203 06 |
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
Гори- |
Приращения |
||
Дирек- |
зон- |
координат (вычислен- |
||
цион- |
таль- |
ные) |
||
ные |
|
|
||
ные |
|
|
||
про- |
|
|
||
углы |
Х |
Y |
||
ложе- |
||||
|
|
|
||
|
ния |
|
|
|
221 14 |
|
|
|
|
226 46 |
142,31 |
+0,03 |
+0,06 |
|
–97,48 |
–103,68 |
|||
|
|
|||
201 17 |
132,91 |
+0,03 |
+0,05 |
|
–123,84 |
–48,24 |
|||
|
|
|||
206 33 |
122,88 |
+0,02 |
+0,05 |
|
–109,92 |
–54,92 |
|||
|
|
|||
183 27 |
Р = |
=–331,24 |
=–206,84 |
|
|
|
|
|
|
Исправленные приращения Координаты координат
Х |
Y |
Х |
Y |
|
|
|
1234,23 |
3987,64 |
–97,45 |
–103,62 |
|
||
|
|
|||
|
3884,02 |
|||
|
|
1136,78 |
||
|
|
|||
–123,81 |
–48,19 |
|
|
|
|
3835,83 |
|||
|
|
1012,97 |
||
|
|
|||
–109,90 |
–54,87 |
|
|
|
|
3780,96 |
|||
|
|
903,07 |
||
|
|
|||
= –331,16 |
=–206,68 |
|
|
|
|
|
|||
изм = 757 48 ; |
=757 47 |
fX = –0,08; |
fY = –0,16; |
Хтеор = –331,16 |
|||||
теор =221 14 – 183 27 +180 4 = 757 47 ; |
fабс f X2 |
fY2 |
|
( 0,08)2 0,16 2 |
0,18; Yтеор = –206,68; |
||||
f = +1 ; |
|
|
|
|
|
|
|
|
|
|
|
4 2,0 |
|
; |
fотносит =1/2211. |
fдопуст = 1/2000 |
|
||
допустимая f 1 |
n 1 |
|
|
||||||
106

fn .
Сумма всех поправок в углы должна равняться невязке f с обратным знаком.
f .
Вычисляются исправленные углы:
исправл изм .
Контроль уравнивания угловых измерений: сумма исправленных
горизонтальных углов равна теоретической сумме
исправл теор .
Пример вычисления угловой невязки (все вычисления, приведенные в примерах, показаны в «Ведомости вычисления координат точек теодолитного хода» табл. 10):
Сумма измеренных углов равна:
изм 174 28 205 29 174 44 203 07 757 48 .
Теоретическая сумма горизонтальных углов правых по ходу равна:
теор Н К 180 n 22114 183 27 180 4 757 47 .
Угловая невязка вычисляется:
f изм теор 757 48 757 47 1 .
Допустимая угловая невязка: f доп t n 1
n 1 4 2 .
4 2 .
Вычисленная угловая невязка f меньше допустимой f доп.
Угловая невязка распределяется с обратным знаком на один угол, т.е. поправка равна минус 1 минута. Предпочтение имеют углы, у которых стороны короче.
Вычисление исправленных углов:
исправл 203 07 1 203 06 .
Контроль уравнивания углов:
174 28 205 29 174 44 203 06 757 47 .
Сумма исправленных углов равна теоретической сумме теор. Контроль получился.
107
5.1.2. Вычисление дирекционных углов
По известному дирекционному углу исходной стороны А–1( А–1) и по исправленным горизонтальным углам испр вычисляются дирекционные углы остальных сторон теодолитного хода по формулам:
n 1 n 180 испр – дирекционный угол последующей сто-
роны равен дирекционному углу предыдущей стороны плюс 180 и минус исправленный угол правый по ходу. Если результат получился больше 360 , то из результата необходимо вычесть 360 .
Для горизонтальных углов левых по ходу формула вычисления дирекционных углов имеет вид:
n 1 n 180 + испр.
Контроль вычисления дирекционных углов: в результате вычислений в разомкнутом теодолитном ходе получается дирекционный угол конечной стороны.
Пример вычисления дирекционных углов:
1 2 |
A 1 |
180 |
1 |
22114 180 |
174 28 226 46 ; |
||||||||||
2 3 |
1 2 180 |
2 |
226 46 180 205 29 20117 ; |
||||||||||||
3 4 |
2 3 |
180 |
|
3 |
|
|
180 |
|
174 |
|
44 |
|
206 |
|
|
|
20117 |
|
|
|
|
|
33 ; |
||||||||
4 B 3 4 180 4 206 33 180 203 06 183 27 .
В конце вычислений получился дирекционный угол конечной сторо-
ны.
5.1.3. Вычисление приращений координат
При решении прямой геодезической задачи получили формулы для вычисления приращений координат Х и Y
X d cos ; |
Y d sin , |
где d – горизонтальное проложение линии; – дирекционный угол этой линии.
Пример вычисления приращений координат:
X1 2 d1 2 cos 1-2 142,31cos226 46 97,48;
X 2 3 d2 3 cos 2-3 132,91cos20117 123,84;X 3 4 d3 4 cos 3-4 122,88cos206 33 109,92;X 331,24.
108

Y1 2 d1 2 sin 1-2 142,31sin 226 46 103,68;
Y2 3 d2 3 sin 2-3 132,91sin 20117 48,24;
Y3 4 d3 4 sin 3-4 122,88sin 206 33 54,92;Y 206,84.
Пример вычисления тригонометрических функций на калькуляторе приведен в прил. 1 и 2.
5.1.4. Уравнивание линейных измерений (приращений координат)
Разность между суммой вычисленных приращений координат и теоретической суммой называется линейной невязкой хода и обозначается fХ и fY .
Уравнивание линейных измерений выполняется раздельно по осям
Х и Y.
Линейная невязка вычисляется по формулам
f X X X теор; fY Y Yтеор ,
где X и Y – сумма вычисленных приращений координат, соответственно по оси Х и Y; X теор и Yтеор – теоретическая сумма
приращений координат, соответственно по оси Х и Y.
Теоретическая сумма приращений координат зависит от геометрии
хода.
Для разомкнутого теодолитного хода теоретическая сумма вычисляется
X теор X К X Н; |
Yтеор YК YН , |
где ХН и YН, ХК, и YК – координаты начальной и конечной точек теодолитного хода, соответственно.
Прежде чем распределять невязки в приращения координат, необходимо убедиться в их допустимости. Для чего вычисляется абсолютная невязка хода fР(абс)
fP абс |
f X2 fY2 |
и относительная
fотн fPPабс ,
где Р – сумма длин линий или горизонтальных проложений, м.
109
Относительная невязка сравнивается с допустимой fдопуст 20001 (для 1 разряда) или 10001 (для 2 разряда). Для тахеометрического хода
1
допустимая невязка вычисляется fдопуст 100 n , n – число сторон хода.
Если относительная невязка больше допустимой, то необходимо заново выполнить вычисления в пунктах 3.1.3 и 3.1.4.
В случае, когда полученная относительная невязка допустима, т.е. выполняется условие fотн fдопуст , вычисляются поправки в приращения
координат пропорционально длинам сторон. Невязки распределяются с обратным знаком на соответствующие приращения.
Поправки в приращения координат X и Y вычисляются с округлением до 0,01 м по формулам:
X |
|
f X |
di ; |
Y |
fY |
di , |
|
|
|||||
|
|
P |
|
P |
||
где X и Y – поправка в приращение координат, соответственно по оси Х и Y, м; fX и fY – невязки по осям, м; Р – периметр (сумма длин), м; di – измеренная длина (горизонтальное проложение), м.
После вычисления поправок следует сделать проверку, т.е. сло-
жить все поправки. |
|
|||
X |
Если |
их |
сумма будет равна невязке с обратным знаком |
|
f X |
и |
Y |
fY , то распределение невязки выполнено пра- |
|
вильно.
Полученные поправки алгебраически прибавляются к соответствующим приращениям и получаются исправленные приращения координат:
X испр X вычисл X ; |
Yиспр Yвычисл Y . |
Контроль: сумма исправленных приращений координат в разомкнутом теодолитном ходе должна равняться теоретической, т.е. должно выполняться равенство:
X испр X теор; Yиспр Yтеор .
Пример вычисления линейной невязки.
Сумма вычисленных приращений координат равна:
X 97,48 123,84 109,92 331,24;
Y ( 103,68) ( 48,24) 54,92 206,84.
110