

696_Formirovanie_radiosignalov_CHast'_1._UMO_
.pdfРис. 28 – Структура пакета с длиной поля адаптации. Транспортный поток содержит программные компоненты с разной
предысторией, в том числе с несколько различающимися тактовыми частотами, поэтому для правильного их воспроизведения требуется привести все сигналы к единой временной базе. Для управления такими потоками вводится механизм синхронизации (PCR) . PCR представляет собой 33-битовое число, отсчитываемое в периодах частоты 90 кГц, получаемой делением на 300 частоты тактового генератора 27 МГц. Это число показывает ожидаемое время завершения считывания в декодере поля PCR из транспортного потока, после чего декодер может приступить к сравнению пришедшего и местного отсчетов
ивыработке корректирующего сигнала.
4.1.1.Интерфейс подачи транспортного потока.
Для подключения источника и приемника транспортного потока стандартом DVB - T предусмотрены три способа:
•параллельный интерфейс SPI (Synchronous Parallel Interface)
•последовательный интерфейс ASI (Asynchronous Serial Interface)
•синхронный последовательный интерфейс SSI (Synchronous Serial
Interface).
Последний практически не используется в практике, так как требует повышенную стабильность тактовых генераторов. Применяется иногда для однонаправленной передачи транспортного потока на небольших расстояниях.
Синхронный параллельный интерфейс SPI
Рекомендуется для коротких и средних расстояний. Данные передаются параллельной шиной 8 бит, а две дополнительные шины интерфейса используются для подтверждения действительных данных (DVALID) и сигнализации о начале транспортного пакета (PSYNC) (Рис. 29).
51

Рис. 29 – Передача данных по 8 – ми битной параллельной шине.
Асинхронный последовательный интерфейс (ASI).
Наиболее распространенным интерфейсом для транспортного потока на сегодняшний день следует признать асинхронный последовательный интерфейс (ASI), в котором скорость передачи постоянна и не зависит от скорости источника. Поддержание постоянства скорости обеспечивается введением при необходимости стаффинговых байтов. Скорость 270 Мбит/сек должна поддерживаться постоянной довольно в жестких пределах ±0.0001.
Канальный кодер использует сбалансированный по постоянному току табличный 8бит/10бит код, который размещает каждые 8 бит полезной информации в 10-ти битовое кодовое слово, подобранное таким образом, чтобы минимизировать постоянную составляющую. Код не инвариантен к логическому инвертированию передаваемых битов, поэтому изменение полярности сигнала недопустимо!
Коаксиальный вариант интерфейса представляет собой кабель 75 Ом обычно с соединителями BNC. К кабелю предъявляются следующие требования: потери из-за затухания и рассогласования в полосе 5-270 МГц не более 15 дБ, максимальное время нарастания/спада импульса от 20 до 80 % не более 1,2 нс, допустимый фазовый джиттер не более 10% от длительности импульса. Номинальное выходное напряжение передатчика составляет 800 мВp-p ±10%, на входе приемника амплитуда сигнала должна поддерживаться в пределах 200-880 мВp-p (Рис. 30).
Рис. 30 - Транспортный поток в ASI интерфейсе.
52
4.2.Выходной сигнал DVB - T передатчика.
4.2.1Основные сведения.
Для передачи информации в системе вещания DVB - T используется модуляция OFDM (Orthogonal Frequency Division Multiplexing –
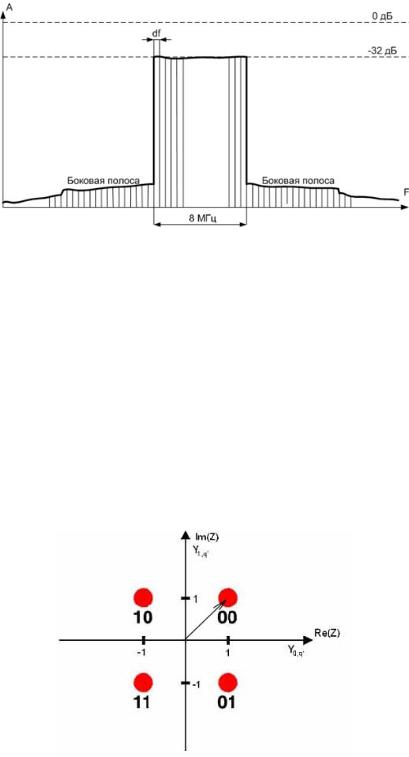
мультиплексирование с разделением на ортогональные частоты). В рабочей полосе частот OFDM сигнал представляет собой набор несущих, каждая из которых модулирована по амплитуде и фазе.
Суммарная мощность несущих соответствует 0 дБ.
Полоса частот анализатора спектра 4 кГц, следовательно, для сигнала 8 МГц уровень линии находится на уровне около 33 дБ (8МГц/4кГц=2000раз=33дБ).
Рис. 31 - Спектр сигнала DVB - T.
Стандартом предусмотрено использование нескольких способов модуляции несущих – QPSK (или 4 - QAM), 16 – QAM, 64 – QAM.
4.2.2 Модуляция QPSK.
Для примера возьмем одну из 6817 несущих (режим 8К). Эта несущая будет иметь одно значение амплитуды, но при этом могут быть четыре варианта фазы этой несущей. Соответственно возможно одной несущей в конкретный момент времени (в течении 896 мкс) передать информацию о состоянии двух битов.
Рис. 32 - Вектор несущей в режиме QPSK.
53

4.2.3Модуляция 16 - QAM.
Вслучае модуляции 16 - QAM каждая несущая может иметь 3 значения амплитуды и 12 значений фазы. В конкретный момент времени каждая несущая несет информацию 4 бита. Соседние по горизонтали и вертикали символы отличаются только в одном бите. Следовательно, если при демодуляции происходит ошибка из-за помех и за демодулированный символ принимается соседний (а такие ошибки наиболее вероятны), то это приводит к ошибке только в одном бите.
Рис. 33 - Возможный вектор несущей в режиме 16 – QAM.
4.2.4Модуляция 64 – QAM.
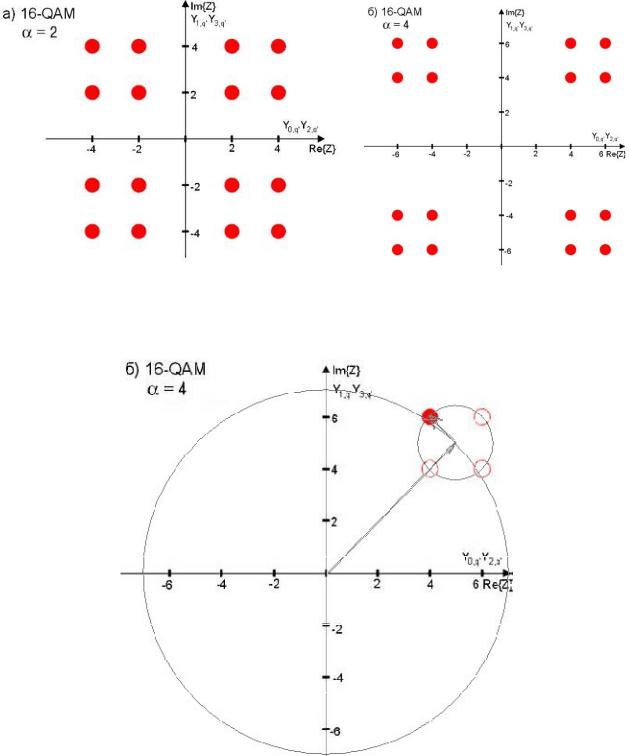
Вслучае модуляции 64 – QAM каждая несущая может иметь 9 значения амплитуды и 48 значения фазы. В конкретный момент времени каждая несущая несет информацию 6 бит.
54
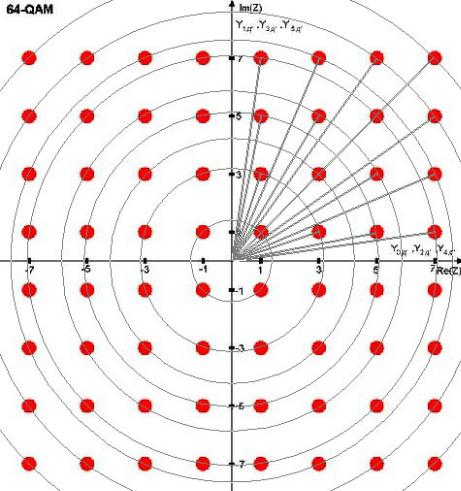
Рис. 34 - Возможный вектор несущей в режиме 64 - QAM.
4.2.5 Иерархический режим.
Иерархический режим нужен для одновременной передачи двух транспортных потоков. Например, один транспортный поток предназначен для мобильных телевизоров. В этом случае требуется достаточно низкая скорость передачи и используется самый помехоустойчивый режим - QPSK. Второй транспортный поток предназначен для стационарного приема и имеет больше скорость, но значительно меньше помехоустойчивость.
При иерархической передаче применяется неоднородная квадратурная модуляция. Особенности иерархической передачи (16 - QAM) иллюстрируют диаграммы рисунка 27. Каждая точка диаграммы определяется четырьмя битами, из которых y0,q' и y1,q' являются битами высшего приоритета, а y2,q' и y3,q' - низшего. Как видно, четыре явно выраженные группы по четыре точки характеризуются одинаковыми битами высшего приоритета.
Расположение точек векторной диаграммы зависит от параметра модуляции, обозначаемого в системе DVB - T буквой α. Этот параметр равен отношению расстояния между соседними точками в двух разных квадрантах к расстоянию между точками в одном квадранте. Стандарт DVB - T предусматривает три значения параметра. При использовании однородной
55
модуляции параметр устанавливается равным 1, в случае неоднородной: α=2
или α=4 (рис. 35а и 35б).
Рис. 35 Возможный вектор несущей в режиме 16 – QAM с параметром модуляции α=2 и α=4.
Рис. 36.
56
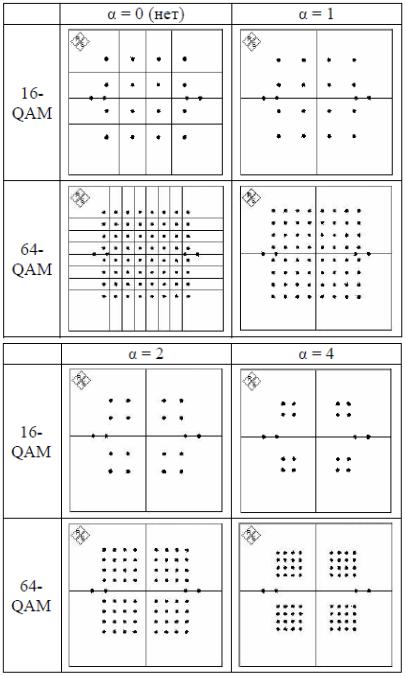
Рис. 37.
4.2.6 Структура данных.
Информация от передатчика DVB - T передается порциями – символами. Символ – это многочастотный сигнал, у которого во время всей его
длительности (TS) амплитуды и фазы несущих остаются неизменными. Интервал TS состоит из двух компонентов: интервала TU, во время
которого передаются входные данные передатчика, то есть полезная информация (интервал TU и называется «полезным»), и защитного интервала TG. Защитный интервал представляет собой копию, или циклическое повторение части полезного интервала, которая вставляется перед полезным. Применение защитного интервала позволяет существенно повысить
57
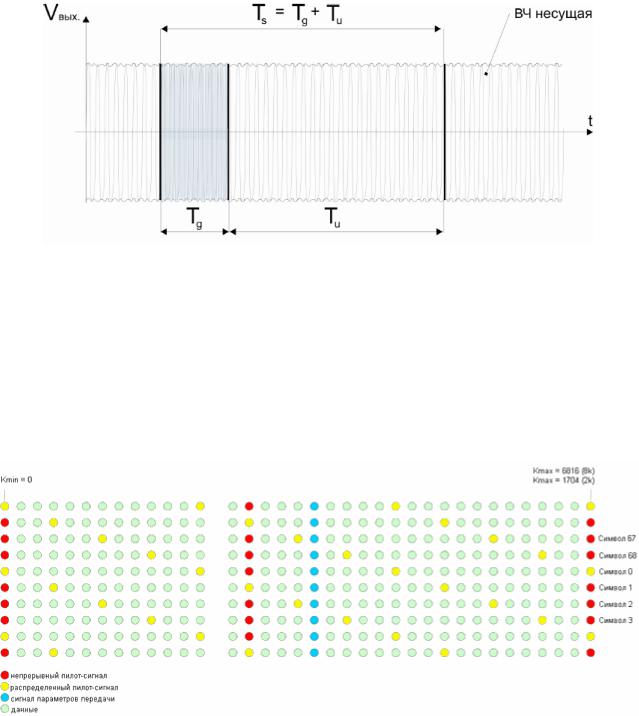
устойчивость приема в условиях многолучевого распространения сигнала. Отраженные сигналы попавшие в защитный интервал не вызывают межсимвольной интерференции. Искажения внутри символа, обусловленные многолучевым распространением радиоволн, эффективно компенсируются встроенным эквалайзером приемника благодаря информации, которая содержится в пилот - тонах, передаваемых в OFDM сигнале.
Tg – защитный интервал. Tu – полезная часть символа.
Ts – длительность символа COFDM.
Рис. 38 - Выходной сигнал передатчика DVB - T во временной области. Передаваемый сигнал организуется в виде кадров рис. 39). Каждый кадр
состоит из 68 символов OFDM, нумеруемых от 0 до 67. Четыре последовательных кадра образуют суперкадр. При выбранной структуре кадра в одном суперкадре всегда содержится целое число пакетов длиной 204 байта (рандомизированных транспортных пакетов MPEG - 2, снабженных для защиты от ошибок проверочными байтами кода Рида - Соломона).
Рис. 39 - Структура кадра DVB - T.
Каждый символ длительностью TS образуется путем модуляции 1705 несущих в режиме 2k и 6817 несущих в режиме 8k. В дополнение к данным в
58
кадре OFDM передаются опорные сигналы, структура которых известна приемнику, а также сведения о параметрах передачи.
Опорные сигналы, называемые пилот - сигналами, получаются в результате модуляции несущих псевдослучайной последовательностью. Пилот - сигналы используются, прежде всего, для синхронизации. Они распределены во времени и в частотном спектре сигнала OFDM, их амплитуды и фазы известны в точке приема, поэтому их можно использовать также для получения сведений о характеристиках канала передачи. В системе используются два типа пилот - сигналов: непрерывные и распределенные. Непрерывные пилот - сигналы передаются на одних и тех же несущих в каждом символе OFDM, распределенные - рассеяны равномерно во времени и в частотном диапазоне. Непрерывные пилот - сигналы могут использоваться для синхронизации и оценки фазовых шумов канала, распределенные - для оценки характеристик канала посредством временной и частотной интерполяции. Использование временной интерполяции в промежутках между распределенными пилот - сигналами при достаточной мощности принимаемого сигнала может помочь для улучшения приема на движущихся объектах, например, на поездах и автомобилях.
Сигналы параметров передачи используются для сообщения приемнику параметров системы, относящихся к канальному кодированию и модуляции: способ передачи – иерархический или неиерархический, параметры модуляции, величина защитного интервала, скорость внутреннего кода, режим передачи - 2k или 8k, номер кадра в суперкадре. Эти сведения могут использоваться приемником для быстрой настройки.
4.3.Основные измеряемые величины.
4.3.1.Анализ входного сигнала.
Оперативный контроль цифрового потока осуществляется в режиме реального времени и должен подтверждать, что транспортный поток удовлетворяет действующим нормативным документам. В частности, должны присутствовать правильно закодированные данные PSI и SI, которые позволяют идентифицировать отдельные составляющие транспортного потока. Во избежание срыва синхронизации дрожание временных меток не должны выходить за определенные пределы.
Кприоритету первого, высшего уровня отнесены параметры, необходимые для декодирования потока – потеря синхронизации, ошибка синхробайта, ошибка PAT и т.п.
Приоритет второго уровня составляют параметры, важные для обеспечения устойчивой работы системы в целом, которые рекомендуется отслеживать непрерывно.
Кприоритету третьего уровня отнесены параметры, представляющие интерес для отдельных приложений.
59
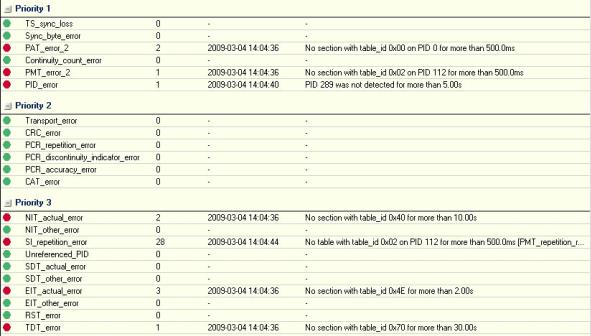
На рис. 40 показано окно программы анализатора транспортного потока в режиме декодирования ошибок.
В данном примере обнаружены ошибки первого уровня:
•PAT_error_2 – секция с таблицей ID 0x00 не появляются, по меньшей мере, каждые 500 мс под PID 0.
•PМT_error_2 – секция с таблицей ID 0x02 не появляются по меньшей мере каждые 500 мс.
•PID_error – PID 289 не обнаружен в течении 5с.
Не обнаружены ошибки второго уровня. Есть ошибки третьего уровня:
•NIT_aktual_error – секция с таблицей ID 0x40 не появляются по меньшей мере каждые 10 с.
•SI_repetition_error – частота повторения SI таблиц с PID 112 более 500 мс.
•EIT_actual_error – секция с таблицей ID 0x4E не появляются по меньшей мере каждые 2 с.
•EDT_error – секция с таблицей ID 0x70 не обнаружена более 30 с.
Рис. 40 - Ошибки первого, второго и третьего уровня.
4.3.2 Анализ выходного сигнала.
Основные характеристики качества передатчика DVB
•MER;
•характеристика боковых полос.
MER (Modulation Error Ratio - коэффициент ошибок модуляции) представляет меру, показывающую насколько фактическое значение комплексной амплитуды несущей спектра сигнала OFDM, отличается от ее
60