

Плясов Лабораторный практикум по курсу обсчей физики 2011
.pdfсветового барьера. Если эти условия не выполнены, пригласите инженера или лаборанта для настройки установки.
4. Положение пускового устройства на штативе не менять!
ЗАДАНИЯ
Задание 1. Экспериментальное определение момента инерции маятника Максвелла
1.Приведите маятник Максвелла в исходное (верхнее) положение. Для этого, медленно вращая стержень, плотно намотайте на него обе нити. Наматывайте нити до тех пор, пока ось маятника не будет находиться на одном уровне со штырем пускового устройства. При этом одно из отверстий на колесе маятника должно оказаться точно напротив штыря фиксирующего устройства. В этом положении нажмите на кнопку на конце гибкого тросика фиксирующего устройства. Это приведет к тому, что стержень выдвинется, войдет в отверстие колеса и зафиксирует маятник.
2.Убедитесь, что в верхнем положении маятника штырь фиксирующего устройства в нажатом состоянии фиксирует колесо маятника Максвелла, а в отжатом состоянии (если кнопку тросика отпустить) обеспечивает его беспрепятственное движение. Если это не так, обратитесь к дежурному сотруднику.
3.Отпустите кнопку, маятник освободится и начнет движение вниз. Проследите, как будет двигаться маятник. Убедитесь, что движение маятника плоское.
4.Медленно вращая стержень, плотно намотайте на него обе нити, чтобы привести маятник в исходное положение. Приведите колесо в соприкосновение с нажатым штырем фиксирующего устройства.
Внимание! При каждом измерении наматывайте нити на ось
маятника с одной стороны (в направлении, показанном на рис. 1.16.4).
5. Верхний указатель расположите на измерительной линейке таким образом, чтобы он совпадал с исходным положением центра масс маятника Максвелла (со штырем фиксирующего устройства). Световой барьер и определяющий его положение нижний указа-
231
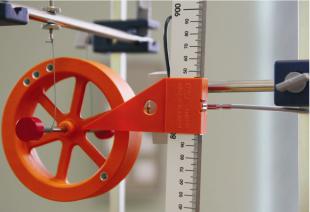
тель установите так, чтобы расстояние между указателями составляло 60 см.
Внимание! Положение пускового устройства на штативе не менять.
Рис. 1.16.4
6.Нажмите кнопку сброса секундомера «Set» и приведите маятник Максвелла в движение, отпустив штырь фиксирующего устройства.
Внимание! Сразу же после этого вновь нажмите на штырь фиксирующего устройства и удерживайте его до тех пор, пока ось маятника не пересечет световой барьер.
После этого световой барьер покажет время движения маятника Максвелла до пересечения его осью луча светового барьера.
7.Запишите результаты измерений в заранее подготовленную табл. 1.16.1.
8.Повторите измерение времени t движения маятника еще два
раза.
9.Повторите пп. 4, 6–8 для других положений светового барьера, задавая их путем его перемещения вдоль штатива в области расстояний от 30 до 60 см ниже исходного положения маятника с интервалом в 5 см.
Внимание! Стартовое положение маятника (положение фиксирующего устройства) не изменяйте.
232
|
|
|
|
|
|
Таблица 1.16.1 |
|
|
|
|
|
|
|
|
|
№ |
h, см |
t, c |
t , c |
t, c |
t2 , c2 |
(t2 ), c2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
… |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
… |
… |
… |
… |
… |
… |
|
|
Задание 2. Проверка закона сохранения полной механической энергии
1. Используя результаты измерений, сделанных в предыдущем задании, для каждого значения h рассчитайте потенциальную и кинетическую энергию маятника по формулам (1.16.18) и (1.16.17) и их погрешности по формулам (1.16.21) и (1.16.20) соответственно. Запишите результаты расчетов в заранее подготовленную табл. 1.16.2.
|
|
|
|
|
|
|
Таблица 1.16.2 |
|
|
h, см |
|
|
|
U , Дж |
|
№ |
|
T , Дж |
|
T , Дж |
U , Дж |
||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
… |
|
|
|
… |
|
… |
|
… |
|
… |
… |
||
|
|
ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ |
|||||
|
|
|
|
Задание 1 |
|
|
|
1. |
Для каждого значения h по результатам трех измерений вре- |
||||||
мени t найти среднее значение < t > и абсолютную погрешность t . При этом в качестве абсолютной погрешности t следует взять
233
приборную погрешность секундомера tпр = 0,001c , если результа-
ты серии измерений различаются последней значащей цифрой. В противном случае t определяется по методу Корнфельда.
2. Для каждого значения h рассчитать квадрат среднего времени t2 и его погрешность
3. Построить график зависимости высоты h от квадрата време-
ни t2 прохождения маятником этого расстояния. Методом парных точек определить угловой коэффициент этого графика k и его погрешность.
4. Используя формулу (1.16.5) и полученное значение углового
коэффициента k |
рассчитать ускорение центра масс маятника: |
wc = 2k и его |
погрешность. Проверьте выполнение условия |
wc g .
5. Рассчитайте момент инерции маятника Максвелла по формуле (1.16.10) и его погрешность по формуле (1.16.11).
Задание 2
1. В задании 2 постройте на одном листе графики зависимости потенциальной и кинетической энергий маятника Максвелла от
пройденного пути, т.е. U (h) и T (h).
2. Сделайте вывод о выполнении закона сохранения энергии при плоском движении маятника Максвелла. Для одной из высот по формуле (1.16.19) оцените работу сил сопротивления, действующих на маятник в ходе его движения.
Представление результатов работы
В заключении к работе по результатам первого задания приве-
дите график зависимости высоты h от квадрата времени t2 прохождения маятником этого расстояния. Сделайте вывод о характере полученной зависимости. Укажите рассчитанный угловой коэффициент графика и ускорение центра масс маятника Максвелла. Сделайте вывод о выполнении условия wc g .
Приведите экспериментальное значение момента инерции маятника. Сравните полученное значение с табличным.
234
В заключении к работе по результатам второго задания приведите графики зависимости потенциальной и кинетической энергий маятника Максвелла от пройденного пути. Сделайте вывод о характере полученных зависимостей. Обсудите выполнение закона сохранения энергии для маятника Максвелла. Приведите оценку для работы сил сопротивления при движении маятника. Оцените, какая доля первоначальной потенциальной энергии идет на преодоление силы сопротивления.
Укажите, какие погрешности играли основную роль в данной работе.
Табличные значения
Масса маятника |
m = 0,512 ± 0,001 кг |
|
|
Радиус оси маятника |
R = 2,5 ± 0,1 мм |
|
|
Момент инерции маятника |
Iтабл =12,0 10−4 кг×м2 |
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Сформулируйте основные уравнения динамики твердого те-
ла.
2.Какое движение тел называется плоским?
3.Сформулируйте основные уравнения плоского движения тел.
4.Дайте определение момента инерции тела относительно произвольной оси.
5.Сформулируйте закон сохранения полной механической энергии для тела, системы тел.
6.Сформулируйте закон сохранения полной механической энергии для маятника Максвелла.
7.Какие физические величины необходимо измерить, чтобы определить момент инерции маятника Максвелла?
8.Как работает схема измерения времени движения маятника в используемой установке?
9.Каково назначение фиксирующего устройства?
10.Измерения каких физических величин в работе являются прямыми, а каких — косвенными?
11.Укажите возможные источники систематических погрешностей в работе.
235
12.Если в результате выполнения задания 2 работы не удается сделать заключение об экспериментальном подтверждении закона сохранения полной механической энергии, какой вывод можно сделать?
13.Как определить работу сил сопротивления, действующих на маятник в ходе его движения?
ЛИТЕРАТУРА
Основная
1.Савельев И.В. Курс общей физики. Т. 1. Механика. М: Аст-
рель АСТ, 2003. С. 156–164, 181–190.
2.Сивухин Д.В. Общий курс физики. Т. 1. Механика. М.: Физ-
матлит, 2006. С. 242–243, 262–266, 269.
Дополнительная
3.Иродов И.Е. Механика. Основные законы. М.: Лаборатория базовых знаний, 2001. С. 152–156.
4.Матвеев А.Н. Механика и теория относительности. М.: Выс-
шая школа, 1986. С. 307–313.
5.Киттель Ч. и др. Механика. М.: Наука, 1983. С. 270–274.
236

Работа 1.17
ИЗУЧЕНИЕ ГИРОСКОПА
Цель: определение момента инерции ротора гироскопа, изучение вынужденной прецессии гироскопа.
Оборудование: гироскоп на карданном подвесе; устройство фиксации оси гироскопа; набор грузов; световой барьер; секундомер; линейка; штангенциркуль.
ВВЕДЕНИЕ
Гироскоп представляет собой массивное симметричное тело (ротор), вращающееся с большой скоростью вокруг оси симметрии. Обычно гироскоп подвешивается таким образом, что одна из точек его оси оказывается закрепленной (так называемая точка опоры гироскопа). Существуют разные способы закрепления гироскопа в одной точке. Один из них – карданов подвес, схема которого представлена на рис. 1.17.1.
Рис. 1.17.1
Подвес состоит из двух рамок: внутренней 1 и внешней 2. Внешняя рамка может вращаться относительно подставки 3 вокруг
237
оси Z. Во внутренней рамке монтируются подшипники ротора 4, а сама внутренняя рамка может вращаться относительно внешней рамки вокруг оси Y. Таким образом, ось ротора Х может занимать любое положение в пространстве. Сам гироскоп в кардановом подвесе имеет три степени свободы и может совершать любые поворо-
ты вокруг центра подвеса О (точки опоры гироскопа) – точки пе-
ресечения осей карданова подвеса.
В уравновешенном (астатическом) гироскопе центр масс гиро-
скопа совпадает с центром подвеса О.
Если трение в подшипниках и трение ротора о воздух настолько малы, что их можно считать практически отсутствующими, то момент приложенных к гироскопу внешних сил N относительно точки О равен нулю и момент импульса гироскопа M остается постоянным. Такой гироскоп называется свободным. Способность сохранять неизменным направление своей оси в пространстве является одним из основных свойств свободного гироскопа.
Все явления, наблюдаемые при движении гироскопа под действием приложенных к нему внешних сил, – следствие основного закона динамики вращательного движения тел:
dM0 |
= N0 , |
(1.17.1) |
|
dt |
|||
|
|
где M0 – момент импульса ротора гироскопа относительно точки O; N0 – момент внешних сил, действующих на ротор гироскопа,
относительно точки O. Уравнение (1.17.1) часто называют уравнением моментов. В дальнейшем (и в тексте, и на рисунках), для простоты, будем опускать значок O у величин M и N .
Пусть к некоторой точке A оси гироскопа приложена постоянная сила, например на ось подвешен небольшой груз массы m. Если точка A расположена на оси гироскопа так, как показано на рис. 1.17.2, то момент этой силы N относительно точки O направлен вдоль оси OY, т.е. отлична от нуля одна компонента момента внешних сил Ny.
Тогда согласно уравнению моментов (1.17.1) за время dt момент импульса гироскопа M , первоначально направленный вдоль оси OX получит приращение dM = Ny dt , совпадающее по направле-
238

нию с направлением вектора Ny , и будет равен M′ = M + dM , причем момент M′ также будет лежать в плоскости XY.
Рис. 1.17.2
Направление вектора M′ задает новое направление оси вращения гироскопа. Таким образом, за время dt ось гироскопа повернется на угол dφ в плоскости XY (см. рис. 1.17.2).
Одновременно на такой же угол повернется в плоскости XY и вектор момента силы тяжести груза Ny . В результате, спустя время
dt, взаимное расположение векторов M и Ny не изменится, т.е.
они по прежнему будут перпендикулярны друг другу и перпендикулярны оси OZ.
За последующий промежуток времени dt вектор M′ вновь получит приращение dM′, перпендикулярное к M′ и т.д. В итоге ось гироскопа будет поворачиваться вокруг оси OZ. Такое движение гироскопа называется прецессией. Угловая скорость прецессии определяется соотношением
Ω = |
dϕ |
. |
(1.17.2) |
|
|||
|
dt |
|
|
В случае, представленном на рис. 1.17.2, вектор угловой скорости прецессии Ω направлен вдоль оси OZ.
239

В общем случае гироскоп при своем движении в каждый момент времени вращается вокруг некоторой мгновенной оси вращения, не совпадающей с осью ротора (осью OX на рис. 1.17.2). Так как ротор обладает осевой симметрией и его ось совпадает с координатной осью OX (см. рис. 1.17.2), то в выбранной системе координат только диагональные компоненты тензора инерции ротора отличны от нуля. Поэтому момент импульса гироскопа может быть записан в виде
M = I&ω& + I ω , |
(1.17.3) |
где ω& – компонента вектора мгновенной угловой скорости ротора
гироскопа, параллельная оси OX (эта компонента равна циклической частоте вращения ротора гироскопа вокруг своей оси ω, т.е. ω& = ω); ω – компонента мгновенной угловой скорости – перпен-
дикулярная оси OX; I& и I – соответствующие компоненты тензора инерции. Величина I& имеет смысл момента инерции ротора
гироскопа относительно собственной оси симметрии (оси OX). Обычно гироскопы конструктивно выполнены так, что моменты
инерции маховика I& и I – величины одного порядка, а угловая
скорость вращения ротора вокруг собственной оси симметрии значительно превосходит компоненту мгновенной угловой скорости, перпендикулярную собственной оси симметрии (в том числе и угловую скорость прецессии, т.е. ω Ω). Поэтому для момента импульса гироскопа можно с достаточной степенью точности исполь-
зовать приближенное выражение |
|
M = Iω, |
(1.17.4) |
где I = I& – момент инерции ротора гироскопа относительно собст-
венной оси OX; ω – угловая скорость вращения ротора гироскопа вокруг собственной оси симметрии.
Если угловая скорость собственного вращения ротора гироскопа не меняется ω= const , то согласно (1.17.4) в ходе его движения
модуль момента импульса также остается постоянным M′ = M .
Тогда приращение момента импульса ротора гироскопа при его повороте на угол dφ за время dt имеет вид
dM =[dφ, M], |
(1.17.5) |
240