

Нижегородский Государственный Технический Университет
Имени Р.Е.Алексеева
Кафедра “Электрооборудование, электропривод и автоматика”
Отчет по лабораторной работе №3
“ Стандартные настройки САУ”
Выполнил:
Федоров К.Р.
Проверил:
Мельников В.Л.
Нижний Новгород
2022 г.
Цель: теоретическое и экспериментальное определение и исследование стандартных настроек САУ.
Программа работы:
1. Рассчитать параметры регулятора при настройке на МО.
2. Получить переходные процессы при скачке задания и возмущения.
3. Построить логарифмические частотные характеристики в разомкнутой системе.
4. Рассчитать параметры регулятора для перехода от МО к СО.
5. Получить переходные процессы при скачке задания (без фильтра и с фильтром на входе) и возмущения.
6. Построить логарифмические частотные характеристики в разомкнутой системе.
7. Оценить по графикам и таблицам показатели качества (перерегулирование, временные показатели, запасы устойчивости)
Вариант исходных данных:
№ студента по списку гр. |
Ко1 |
Ко2 |
Кос |
Т mc |
Тµ mc |
Кр для МО
|
Парам W”для перех к СО Ти,Tф=4Tµ
|
5 |
10 |
1 |
0.1 |
90 |
5 |
9 |
0,02 |

Структурна схема моделируемого контура

1. Расчет параметров регулятора при настройке на МО
Настройка контура предполагает выбор типа регулятора и определение его параметров.
Передаточная функция объекта:

Передаточная функция регулятора выбирается из условия:


отсюда
 .
.
Таким
образом, для настройки необходим
пропорциональный регулятор с коэффициентом
 .
.
Настроечный коэффициент «а» находится из анализа передаточной функции замкнутого контура, настроенного на МО:
 ,
,
где
 - постоянная времени,
- постоянная времени,
 – коэффициент затухания. Таким образом
при оптимальной настройке замкнутый
контур является колебательным звеном
с коэффициентом затухания
– коэффициент затухания. Таким образом
при оптимальной настройке замкнутый
контур является колебательным звеном
с коэффициентом затухания


Отсюда определим коэффициент регулятора:

2 Исследование характеристик контура, настроенного на модульный оптимум
2.1 Переходные процессы при скачке задания:
Модель, выполненная в программе SamSim:

Переходные процессы:

Расчёты, выполненные в программе MathCad:

Вывод:
перерегулировка составляет:
 то есть менее 5 % от установившегося
значения
то есть менее 5 % от установившегося
значения
2.2 Переходные процессы при скачке возмущения:
Модель, выполненная в программе SamSim:

Переходные процессы:

Расчёты, выполненные в программе MathCad:

2.3 Переходные процессы при скачке задания и возмущения:
Модель, выполненная в программе SamSim:

Переходные процессы:

Расчёты, выполненные в программе MathCad:

Вывод:
перерегулировка составляет:
 то есть менее 5 % от установившегося
значения. А также в системе присутствует
ошибка по возмущению.
то есть менее 5 % от установившегося
значения. А также в системе присутствует
ошибка по возмущению.
3. Логарифмические и частотные характеристики разомкнутой системы:
Модель, выполненная в программе SamSim:

Годограф:

ЛАФЧХ:

4. Расчет параметров регулятора для перехода от МО к СО
Для
обеспечения устойчивости параметры
регулятора и
и
 выбираются таким образом, чтобы
асимптотическая ЛАЧХ разомкнутого
контура имела наклон -20дБ/дек в районе
частоты среза и была бы симметрична
относительно
выбираются таким образом, чтобы
асимптотическая ЛАЧХ разомкнутого
контура имела наклон -20дБ/дек в районе
частоты среза и была бы симметрична
относительно
 (на рис. 4.2 СН – симметричная настройка).
(на рис. 4.2 СН – симметричная настройка).
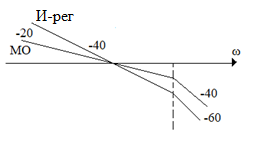

Рис. 4.1 Рис. 4.2
Параметры регулятора для СН определим в два этапа.
Для
настройки на МО
необходим регулятор

Для
перехода от модульной к симметричной
настройке
необходим регулятор, имеющий ЛАЧХ
 (рис. 4.1) -
(рис. 4.1) -
 .
.
Таким
образом для симметричной настройки
необходим регулятор с передаточной
функцией

В качестве
фильтра используют инерционное звено
с

5. Исследование характеристик контура, настроенного на симметричный оптимум
5.1 Переходные процессы при скачке задания без фильтра.
Модель, выполненная в программе SamSim:

Переходные процессы:

Расчёты, выполненные в программе MathCad:

Вывод:
перерегулировка составляет:
 то есть более 40 % от установившегося
значения.
то есть более 40 % от установившегося
значения.
5.2 Переходные процессы при скачке задания с фильтром.
Модель, выполненная в программе SamSim:

Переходные процессы:

Расчёты, выполненные в программе MathCad:

Вывод:
перерегулировка составляет:
 то есть менее 10 % от установившегося
значения.
то есть менее 10 % от установившегося
значения.
5.3 Переходные процессы при скачке возмущения.
Модель, выполненная в программе SamSim:

Переходные процессы:

Расчёты, выполненные в программе MathCad:

5.4 Переходные процессы при скачке задания с фильтром и при скачке возмущения. (возмущение имеет задержку tзадержки=0,15 с)
Модель, выполненная в программе SamSim:

Переходные процессы:

Расчёты, выполненные в программе MathCad:

Вывод: перерегулировка составляет: то есть менее 10 % от установившегося значения.
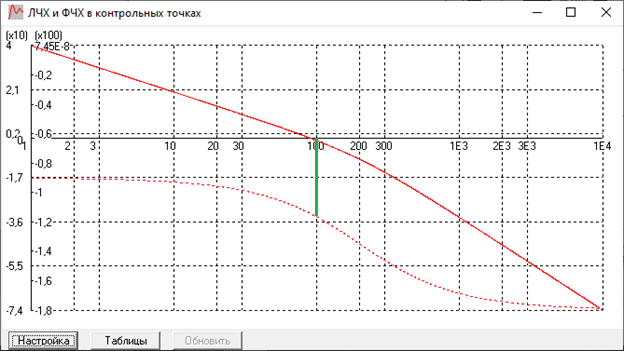
6. Логарифмические и частотные характеристики разомкнутой системы:
Модель, выполненная в программе SamSim:

Годограф:

ЛАФЧХ:

7. Оценка показателей качества (перерегулирование, временные показатели, запасы устойчивости).
В замкнутой системе, настроенной на модульный оптимум:
Перерегулировка – менее 5 % от установившегося значения. Что соответствует теоретическим данным σ=4,3%.
Временные показатели – система приходит к установившемуся значению за t=0.044с = 8.8 Тμ . Что соответствует теоретическим данным tр=8,4 Тμ

Частота
среза
 c=100.
Что
соответствует теоретическим данным
c=100.
Что
соответствует теоретическим данным

Запас устойчивости по фазе равен примерно 60о. Что соответствует теоретическим данным Δφ=63о.
В системах с сигналом по возмущению, появляется ошибка, которая влияет на установившееся значение выходного сигнала.
В системе, настроенной на симметричный оптимум:
Перерегулировка – более 40 % от установившегося значения. Что соответствует теоретическим данным σ =43,4%
Проблему
перерегулировки решают установкой
фильтра (инерционное звено на входе по
заданию, с параметром
 )
)
В системе с фильтром, настроенной на симметричный оптимум:
Перерегулировка – менее 10% от установившегося значения. Что соответствует теоретическим данным σ = 8,1%,
Временные показатели – система приходит к установившемуся значению за t=0.065с = 13 Тμ. Что соответствует теоретическим данным tр =13,3Тμ

Частота среза wc=100. Что соответствует теоретическим данным
Запас устойчивости по фазе равен примерно 37о. Что соответствует теоретическим данным Δφ=36,8°.
В системах с сигналом по возмущению, появляется ошибка, которая не влияет на установившееся значение выходного сигнала. Что является важным преимуществом систем, настроенных на СО, перед системами, настроенными на МО.
