

ЛР_РО_ИбрагимваРахимоваСтепановаШакиров_МО417
.docxУФИМСКИЙ ГОСУДАРСТВЕННЫЙ АВИАЦИОННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФАКУЛЬТЕТ ИНФОРМАТИКИ И РОБОТОТЕХНИКИ
КАФЕДРА ВЫЧИСЛИТЕЛЬНОЙ МАТЕМАТИКИ И КИБЕРНЕТИКИ
Отчёт по лабораторным работам
«Система распознавания свободных парковочных мест»
по предмету:
«Распознавание образов»
Выполнили:
студенты группы МО-417
Ибрагимова К.Б.
Рахимова А.М.
Степанова Д.Д.
Шакиров А.Р.
Проверил:
Шахмаметова Г.Р.
Уфа 2021
Постановка задачи
Построение системы распознавания свободных парковочных мест.
Входные данные – статичное изображение формата png.
Выходные данные – изображение с выделенными цветом свободными парковочными местами и их количество.
Анализ возможных методов решения
Сравнение с эталоном – процесс распознавания заключается в простом сопоставлении образов, поступающих на вход распознающего устройства или алгоритма, с эталонами классов, на основе выбранной меры сходства.
Методов сравнения довольно много – попиксельное, наложение, наложение со смещением и прочие.
Примерами использования являются распознавание печатных шрифтов, тематическая обработка изображений при распознавании текстур и выделении объектов определенной формы и т. п.
Синтаксический метод – применяется к задачам распознавания образов, в которых важна информация о структуре конкретного объекта. От процедуры распознавания требуется не только, чтобы она могла определить объекту его класс, но и обнаружить такую информацию об объекте, которая не позволяет отнести его к другому классу.
Например, синтаксический метод распознавания можно использовать для классификации символов алфавита, когда каждая буква может иметь различные варианты начертания, но в общем виде она будет выглядеть одинаково.
В рамках этого подхода считается, что образы состоят из различных подобразов, так же как фразы и предложения строятся путем соединения слов (отсюда другое название – синтаксический метод).
Признаковый метод – базируется на том, что изображению ставится в соответствие N-мерный вектор признаков. Распознавание заключается в сравнении его с набором эталонных векторов той же размерности.
Принятие решения о принадлежности образа тому или иному классу, на основании анализа вычисленных признаков, имеет целый ряд строгих математических решений в рамках вероятностного подхода. Тип и количество признаков в немалой степени определяют качество распознавания. Формирование вектора происходит во время анализа изображения. Данную процедуру называют извлечением признаков.
Эталон для каждого класса получают путем аналогичной обработки символов обучающей выборки.
К достоинствам метода можно отнести: простота реализации, высокая обобщающая способность, устойчивость к изменению формы образа, высокое быстродействие.
К недостаткам метода относятся: неустойчивость к различным дефектам изображения, потеря информации о символе на этапе извлечения признаков.
В каждой конкретной задаче важен правильный выбор «наиболее информативных признаков» распознаваемого изображения, так как он определяет лучшую конструкцию устройства и более широкие перспективы его использования. К признаковым методам распознавания образов относятся методы, применяющие нейросети.
Для решения поставленной задачи нами был выбран признаковый метод. Так как данный метод прост в реализации, обладает высокой обобщающей способностью, имеет устойчивость к изменению формы образа и для реализации решения существуют готовые удобные инструменты.
В качестве инструмента для решения поставленной задачи была выбрана модель Sequential.
Sequential – модель представляет собой линейный стек слоев.
TensorFlow – это комплексная платформа с открытым исходным кодом для машинного обучения. Он имеет всеобъемлющую гибкую экосистему инструментов, библиотек и ресурсов сообщества, которая позволяет исследователям продвигать новейшие достижения в области машинного обучения, а разработчикам легко создавать и развертывать приложения на основе машинного обучения.
Keras – это API глубокого обучения, написанный на Python, работающий поверх платформы машинного обучения TensorFlow.
Достоинства:
Эффективное выполнение низкоуровневых тензорных операций на CPU, GPU или TPU.
Простота в использовании.
Экспорт программ («графиков») во внешние среды выполнения, такие как серверы, браузеры, мобильные и встроенные устройства.
Анализ существующих решений в данной области
Модуль «Парковочные места» в программе Xeoma – это способ детектирования нужного типа объектов в заданной зоне. Модуль позволяет автоматически определять статус парковочных мест (свободно/занято).
https://felenasoft.com/xeoma/ru/articles/parking-spots/#intro
Достоинства:
При появлении в выбранной зоне другого типа объектов модуль не будет срабатывать, что гарантирует высокий уровень точности работы детектора.
Возможность функций оповещения по email и сбора статистики.
Модуль может быть применен и на детекцию других типов объектов.
Недостатки:
Проблемы в ручной настройке камер.
При построении больших и разветвленных схем камер они становятся не читаемыми.
Низкая отзывчивость интерфейса для десктопной версии программы.
Parkeon – уникальный инструмент для управления парковками предлагает инновационные интеллектуальные транспортные решения и парковочные решения.
https://www.parking-net.com/parking-industry/parkeon
Достоинства:
Терминалы Parkeon работают на солнечной энергии и полностью способны поддерживать удаленные беспроводные подключения к веб-системе управления Parkfolio, а также самые современные технологии оплаты и продажи билетов.
Использование нейросетей для распознания и регистрации автомобильных номеров.
Недостатки:
Система предназначена только для коммерческого использования.
Микком AS101 ProPark – система определяет расположение свободных и занятых мест и/или подсчитывает количество въехавших и выехавших машин.
http://miccom.ru
Достоинства:
Система обладает высокой надежностью, удобством и простотой эксплуатации.
Система обеспечивает оперативный и постоянный контроль загруженности с предоставлением персоналу всей необходимой информации, управление светофорами, табло и шлагбаумами.
Недостатки:
Система предназначена только для коммерческого использования.
Разработка IDEF модели
Разработаем IDEF модели ПО первого, второго и третьего уровня декомпозиции.

Рисунок 1 – Контекстная диаграмма «Система распознавания свободных парковочных мест»

Рисунок 2 – Декомпозиция контекстной диаграммы «Система распознавания свободных парковочных мест»

Рисунок 3 – Декомпозиция функционального блока «Предобработка изображения»

Рисунок 4 – Декомпозиция функционального блока «Распознавание автомобилей на парковочных местах»

Рисунок 5 – Декомпозиция функционального блока «Подсчёт количества свободных мест»
Алгоритм в виде блок-схемы
Опишем алгоритм ПО в виде блок-схемы.
Список
закончился
Содержит


Рисунок 6 – Блок-схема алгоритма
Диаграмма активности
Была разработана диаграмма активности по работе ПО.

Рисунок 7 – Диаграмма активности
Обученная модель нейросети
После обучения модель распознавания выглядит следующим образом:

Рисунок 8 – Модель нейросети
Скриншоты работы ПО
Разработанное ПО представлено в виде интерактивной платформы (ноутбук).

Рисунок 9 – Вывод на экран информации об обученной модели
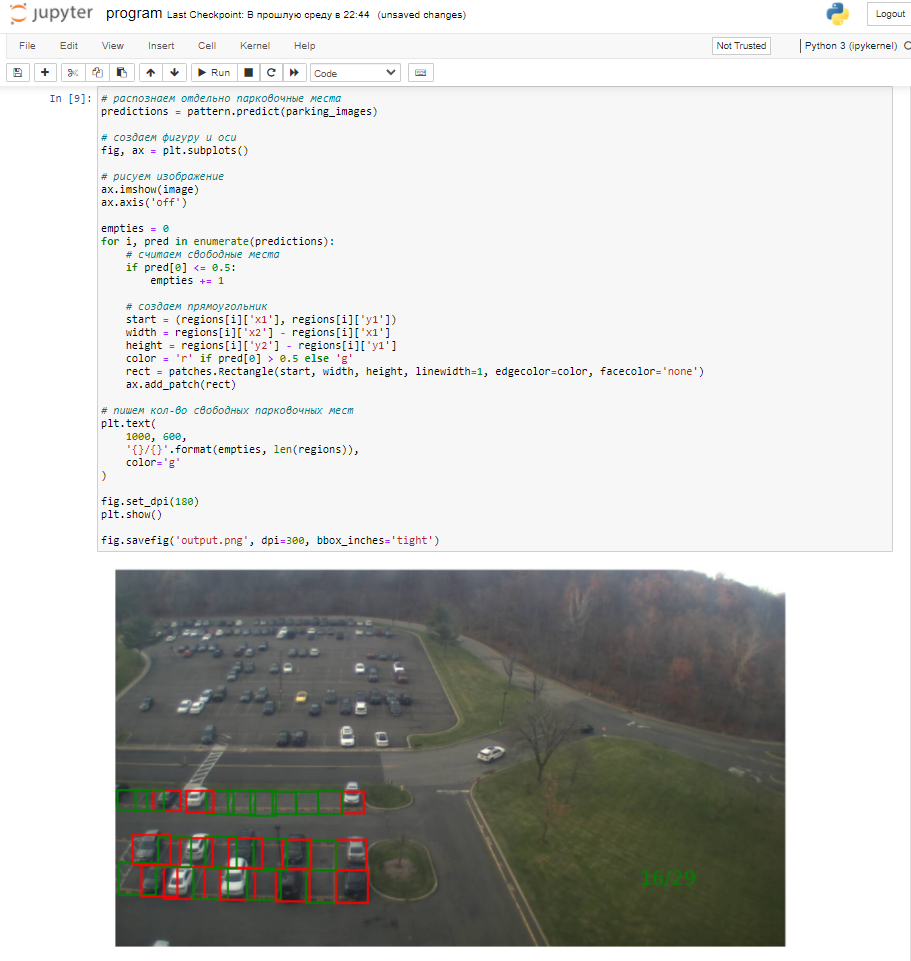
Рисунок 10 – Вывод на экран конечного результата работы
Проведем описание проделанной работы в ходе выполнения поставленной задачи, проведя классификацию сделанного нами и сделанного библиотеками.
Сделано нами |
Сделано библиотеками |
Формирование карты парковки |
Аугментация тренировочного набора данных (Keras) |
Настройка модели РО (слои НС, загрузка весов) |
Распознавание набора данных обученной моделью (Keras) |
Формирование тренировочного набора данных для обучения с указанием классов |
|
Формирование проверочного набора данных для обучения с указанием классов |
|
Обучение модели РО на сформированных тренировочного и проверочного наборов данных |
|
Загрузка изображения в программу |
|
Нормализация изображения |
|
Формирование тестового набора для распознавания согласно карте парковки |
|
Вывод на экран исходного изображения с выделенными парковочными местами цветом и количеством свободных парковочных мест |
|
Экспорт выведенного на экран итогового изображения в файл |
|
Вывод
В ходе выполнения лабораторной работы была построена система распознавания свободных парковочных мест.