

Зависимости M=f(f2) (а) и U1=f(f1) (б) при регулировании по условию Фт = const
Регулированиепутем изменения числаполюсов.
Позволяетполучить ступенчатоеизменениечастоты вращения.Показана простейшая схема (для одной фазы), позволяющаяизменять число полюсов обмоткистатора в 2 раза. Для этого каждую фазу обмоткистатора разделяют на две части, которые переключают с последовательного соединенияна параллельное.Привключениикатушек1—2 и 3—4 вдве параллельные ветвичислополюсов уменьшаетсяв 2 раза, а следовательно,частота вращениямагнитногополяувеличиваетсяв 2
раза. Асинхронныедвигателис переключением числа полюсов называют многоскоростными.
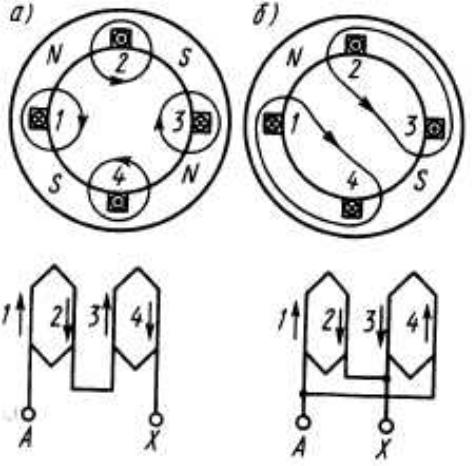
Схема переключенияоднойфазы обмоткистатора дляизменения числа полюсов
при 2p=4 (а) и 2p = 2(б)
Схемы, приведенные на рис a, б, обеспечивают переключение при постоянном моменте, а схемы, приведенные на рис. в, г,— при приблизительно постоянноймощности.
Многоскоростные двигатели имеют следующие недостатки: большие габариты и массу по сравнению с двигателями нормального исполнения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями3000:1500:1000:750

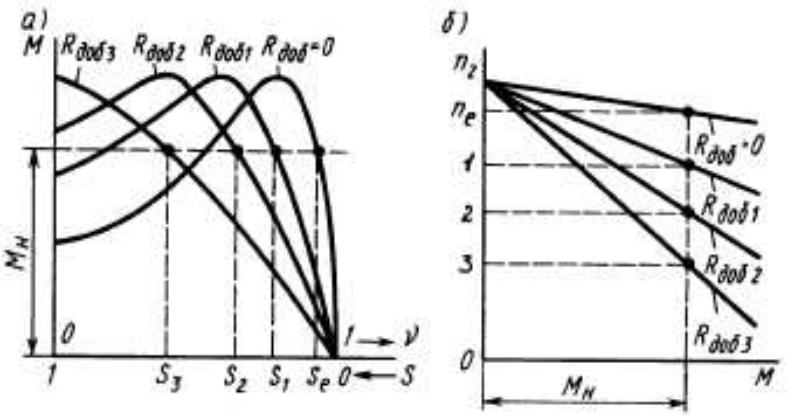
Регулирование путем включения реостата в цепьротора.
Этот метод регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются: а) большие потери энергии в регулировочном реостате; б) чрезмерно «мягкая» механическая характеристика двигателя при большом сопротивлении в цепи ротора

Регулирование путем изменения питающего напряжения. Этот способ можно осуществить посредством тиристорного регулятора напряжения РН в каждой фазе которого включено по два тиристора
При изменении угла регулирования тиристоров изменяется действующее значение напряжения, подаваемого на асинхронный двигатель АД. Если вход блока управления тиристорами связать системой обратной связи с датчиком частоты вращения двигателя, то регулятор будет поддерживать неизменной частоту вращения
При регулировании U1 изменяется форма механической характеристики двигателя , что при постоянном нагрузочном моменте Мн приводит к изменению s и n2. Регулирование проводят уменьшением напряжения, так как его увеличение приводит к недопустимому возрастанию тока холостого хода. Для двигателей нормального исполнения такое регулирование неприменимо, так как при уменьшении питающего напряжения резко уменьшаетсямаксимальныймоментМмах.