

roboty_lab3
.pdfОтчет по лабораторной работе № 3
по дисциплине «Робототехника и гибкие автоматические производства»
на тему: «Упрощенный анализ устойчивости и качества следящей системы с упругой кинематической передачей»
Цель работы
Проведение сравнительного анализа устойчивости и качества следящих систем с абсолютно жесткой и упругой кинематическими передачами с использованием их частотных характеристик в разомкнутом состоянии и результатов имитационного моделирования.
1. Определим параметры колебательного звена, описывающие динамику упругой кинематической передачи:
m = 350 Нм с/рад
k = 107 Нм/рад
Jн = 5,5 кг м3
2. Построим асимптотические ЛАЧХ разомкнутой системы с упругой кинематической передачей в двух вариантах и оценим ее устойчивость
2.1. без корректирующего устройства, если главная обратная связь с вала редуктора:
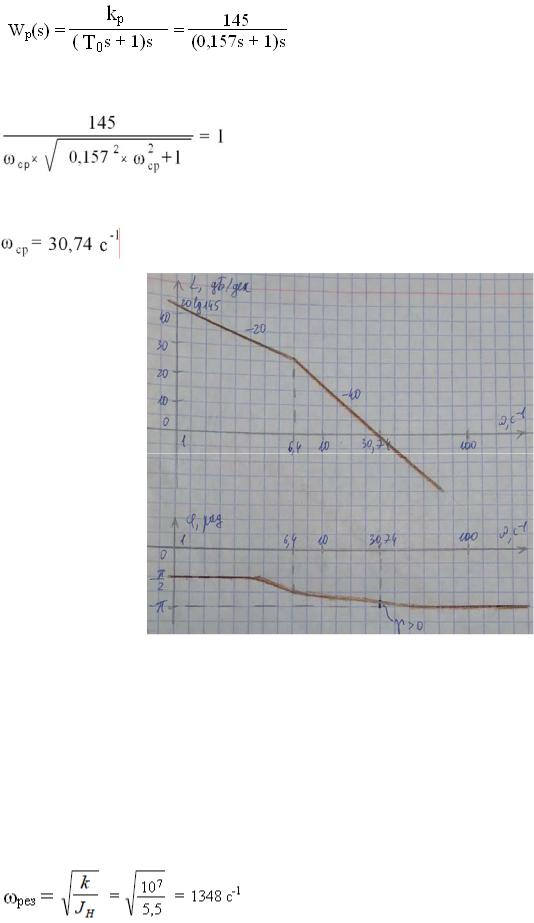
Из уравнения:
получено значение частоты среза:
Рисунок 1 - Асимптотическая ЛАЧХ системы без корректирующего устройства при главной обратной связи с вала редуктора
Запас по фазе γ положительный, следовательно, замкнутая система устойчива.
2.2. без корректирующего устройства, если главная обратная связь с вала нагрузки:
1 / (2d) = 1 / (2 0,0236) = 21
2
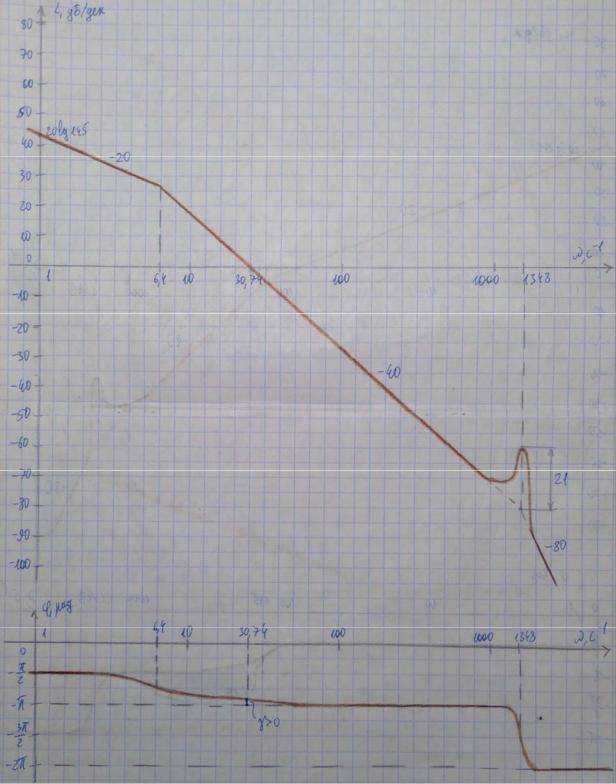
Рисунок 2 - Асимптотическая ЛАЧХ системы без корректирующего устройства при главной обратной связи с вала нагрузки
Запас по фазе γ положительный, следовательно, замкнутая система устойчива.
3
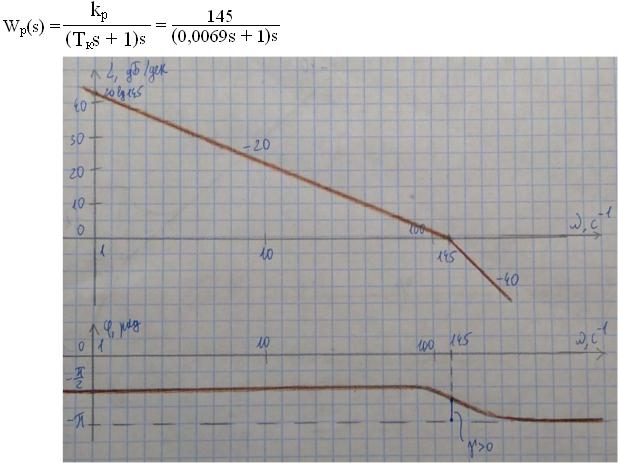
2.3. с последовательно включенным корректирующим устройством, если главная обратная связь с вала редуктора:
Рисунок 3 - Асимптотическая ЛАЧХ системы с корректирующим устройством при главной обратной связи с вала редуктора
Запас по фазе γ положительный, следовательно, замкнутая система устойчива.
2.4. с последовательно включенным корректирующим устройством (параметры корректирующего устройства берутся из лабораторной работы №2), если главная обратная связь с вала нагрузки:
4
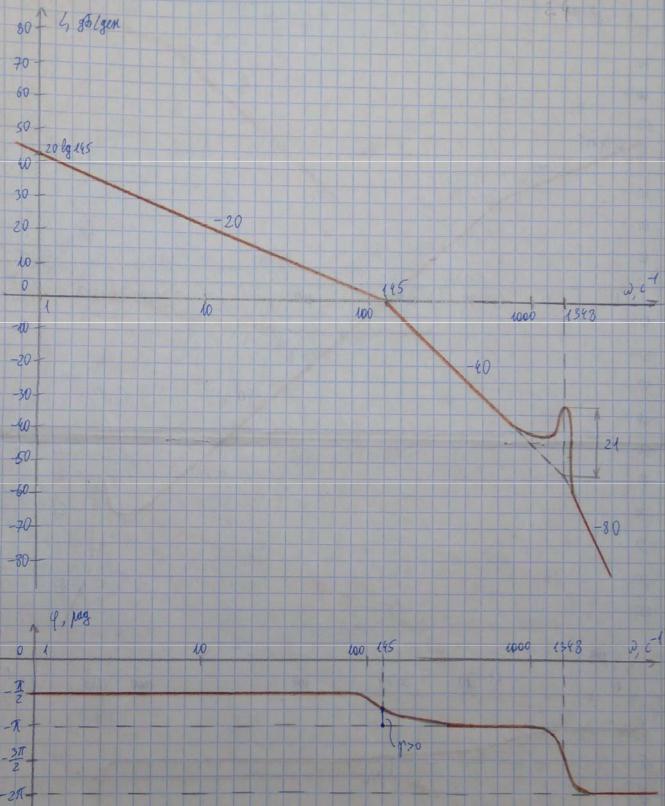
Рисунок 4 - Асимптотическая ЛАЧХ системы с корректирующим устройством при главной обратной связи с вала нагрузки
Запас по фазе γ положительный, следовательно, замкнутая система устойчива.
5
3.Используя параметры отработанной схемы модели системы (в Simulink) в лабораторной работе № 2 без коррекции и с коррекцией, дополним эти модели колебательным звеном, описывающим упругие свойства кинематической передачи,
ипроизведем оценку качества замкнутой системы при разных вариантах замыкания главной обратной связи
3.1.система без коррекции, обратная связь с вала редуктора:
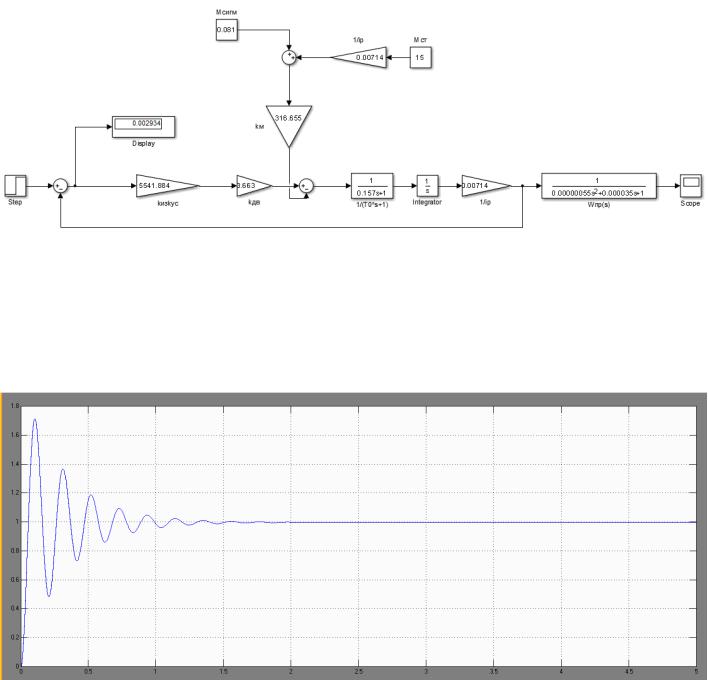
Рисунок 5 – Моделируемая система без корректирующего устройства при главной обратной связи с вала редуктора
Используем метод Рунге-Кутты 4-го порядка с постоянным шагом 0,001 с по времени.
Рисунок 6 – Результаты моделирования Из полученных результатов видно, что переходной процесс представляет собой
затухающие колебания, а значение установившейся ошибки составляет
6
δсист = 0,002934.
3.2.система без коррекции, обратная связь с вала нагрузки:
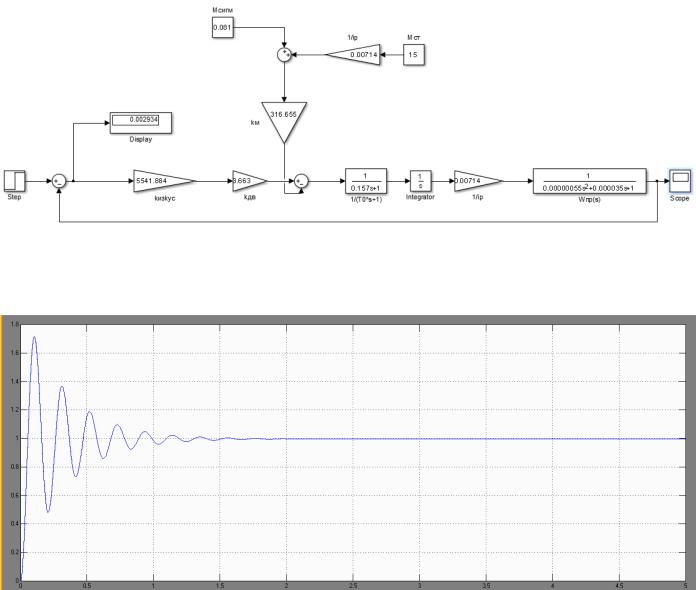
Рисунок 7 – Моделируемая система без корректирующего устройства при главной обратной связи с вала нагрузки
Рисунок 8 – Результаты моделирования Из полученных результатов видно, что переходной процесс представляет собой
затухающие колебания, а значение установившейся ошибки составляет
δсист = 0,002934.
Примечание: если значение ошибки отличается от 3.1.-3.2., то можно попробовать взять несколько большее время время моделирования.
7
3.3.система с коррекцией, обратная связь с вала редуктора:
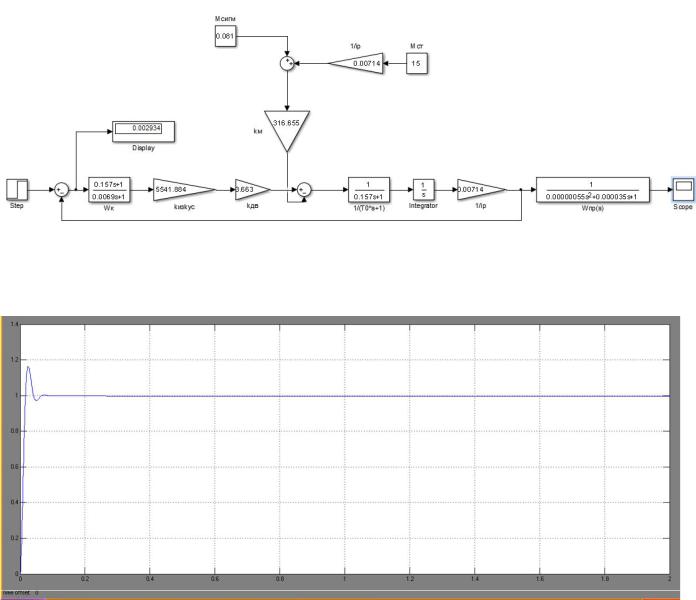
Рисунок 9 – Моделируемая система с корректирующим устройством при главной обратной связи с вала редуктора
Рисунок 10 – Результаты моделирования Из полученных результатов видно, что для системы характерен переходной процесс
с перерегулированием, значение установившейся ошибки составляет
δсист = 0,002934.
8
3.4.система с коррекцией, обратная связь с вала нагрузки:
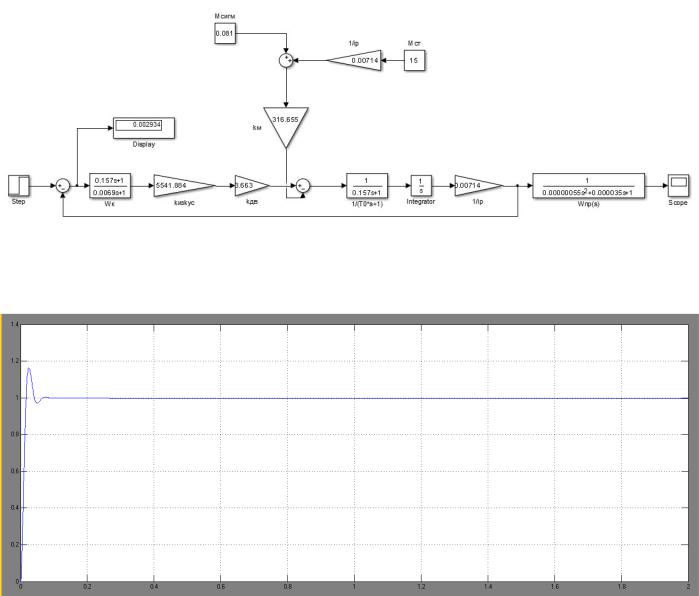
Рисунок 11 – Моделируемая система с корректирующим устройством при главной обратной связи с вала нагрузки
Рисунок 12 – Результаты моделирования Из полученных результатов видно, что для системы характерен переходной процесс
с перерегулированием, значение установившейся ошибки составляет
δсист = 0,002934.
4. Для каждого из четырех вариантов, рассмотренных в п. 3, построим диаграммы Боде для систем в разомкнутом состоянии
4.1 система без коррекции, размыкание обратной связи с вала редуктора:
9
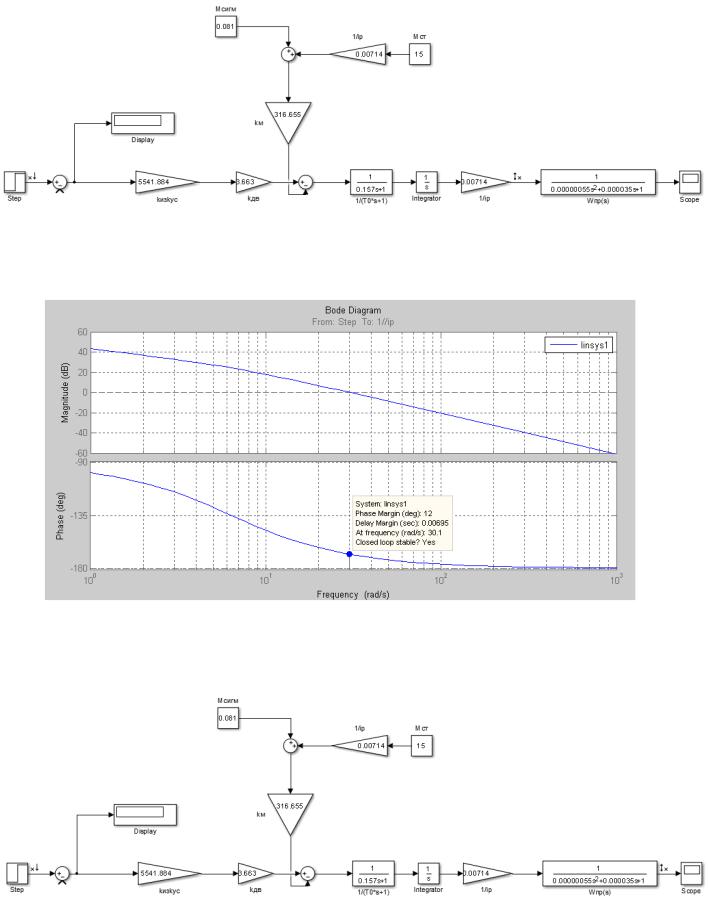
Рисунок 13 – Система без корректирующего устройства при разомкнутой главной обратной связи с вала редуктора
Рисунок 14 – Диаграмма Боде
4.2 система без коррекции, размыкание обратной связи с вала нагрузки:
Рисунок 15 – Система без корректирующего устройства при разомкнутой главной обратной связи с вала нагрузки
10