

Методическое пособие 827
.pdfРис. 8.5. Грунтовой насос:
1 – лопасти; 2 – всасывающий патрубок; 3, 5 – диски рабочего колеса; 4 – корпус; 6 – трубка для подачи воды; 7 – ступица; 8 – вал; 9 – сальниковое
уплотнение; 10 – крышка корпуса; 11 – отливной канал. Стрелками показаны направления движения пульпы
Рабочие перемещения землесосных снарядов должны обеспечивать дви- жение грунтозаборного устройства в горизонтальной плоскости. При этом дви- жение должно осуществляться по заданным траекториям с регулируемой ско- ростью, без холостых ходов, т. е. движения грунтозаборного устройства по вы- работанным участкам забоя.
Впоследние годы применяют три способа рабочих перемещений земле- сосных снарядов: канатный, свайно-канатный и свайный. Каждый способ мо- жет осуществляться по нескольким схемам в зависимости от характера работ, выполняемых земснарядом. В соответствии с этими схемами земснаряд с грун- тозаборным устройством может перемещаться поступательно вдоль своей про- дольной оси или поперек нее; может совершать веерное движение, поворачива- ясь относительно неподвижной точки или, оставаясь на месте, поворачивать в горизонтальной плоскости грунтозаборное устройство и т. д. Большая часть землесосных снарядов с грунтозаборным устройством в процессе работы дви- жется по дугам окружностей. Их центрами служат сваи, опущенные в грунт.
Всостав свайного устройства входят две сваи, расположенные в кормо- вой части снаряда, и лебедки, с помощью которых он совершает повороты. Сваи поднимают и опускают в грунт попеременно, что дает возможность пово- рачивать землесосный снаряд относительно их поочередно.
51
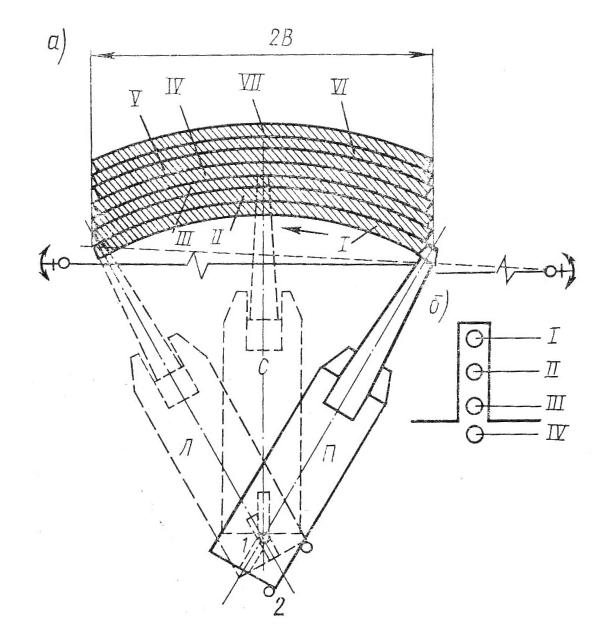
На рис. 8.6 сплошными линиями показано первоначальное положение снаряда П у правой бровки разрабатываемого участка.
Рис. 8.6. Способ папильонирования с рабочим свайным ходом: а – план; б – положение напорной сваи в прорези корпуса;
П, Л – положение земснаряда соответственно у правой и левой бровок; С – среднее положение снаряда; I … VII – папильонажные ленты;
I …IV – положения напорной сваи; 2В – ширина разрабатываемого участка; 1 – напорная свая; 2 – прикольная свая
Снаряд поворачивается вокруг сваи с помощью натягиваемых тросов, со- единенных с якорями. В это время фреза разрабатывает грунт на площади лен- ты, после чего снаряд переходит в положение Л (у левой бровки). Затем при помощи напорного механизма землесосный снаряд отталкивается от сваи, про-
52

двигается вперед на ширину одной ленты и совершает рабочий ход в обратном направлении. Такие веерные перемещения грунтозаборного устройства или землесосного снаряда называют папильонированием (в переводе с французско- го – порхание бабочки).
Основным оборудованием для выполнения гидромониторных работ слу- жат гидромониторы – устройства, предназначенные для формирования ком- пактной водяной струи. Они превращают потенциальную энергию воды, пода- ваемой по напорному трубопроводу, в кинетическую энергию струи и направ- ляют ее в нужную точку забоя. В результате действия струи грунт разрушается
и, смешиваясь с водой, образует пульпу.
Гидромонитор (рис. 8.7) состоит из неподвижного нижнего колена и верхнего, которое можно поворачивать вокруг вертикальной оси благодаря вер- тикальному шарнирному устройству. Подвижное колено с помощью шарового шарнира соединено со стволом, несущим на конце насадку. Оси шарниров вза- имно перпендикулярны. Шаровой шарнир дает возможность поворачивать ствол гидромонитора в вертикальной плоскости на угол около 25° вниз и около 50° вверх от горизонтального положения. Воду подводят к нижнему колену, из которого она поступает в верхнее колено, а через ствол и насадку в виде ком- пактной струи выбрасывается наружу.
Рис. 8.7. Гидромонитор:
а– общий вид гидромонитора; б – вертикальный шарнир гидромонитора;
1– нижнее колено; 2 – обойма; 3 – шарикоподшипник; 4 – кольцо; 5 – крышка сальника; 6, 9 – стяжные болты; 7 – фланец верхнего колена; 8 – верхнее колено;
10 – шарнирное устройство; 11 – шаровой шарнир; 12 – ствол; 13 – насадка; 14 – сальник
53
Гидромониторы питают водой с помощью насосных установок. Обычно насосную станцию компонуют из двух или больше центробежных насосов. Проточную часть гидромониторов (нижнее и верхнее колена, ствол, насадка) проектируют так, чтобы компактную струю воды можно было создать с наи- меньшими гидравлическими потерями. С этой целью внутренней полости ство- ла придают конусность в 3…5° в направлении движения потока. Кроме того, внутри ствола устанавливают ребра-успокоители параллельные его оси. Эти ребра служат для гашения вращательного движения воды и уменьшения вихре- вых потоков в струе.
Гидромониторы монтируют обычно на металлических салазках (сварных или штампованных) или на самоходных шасси (гусеничных или шагающих). В зависимости от этого их подразделяют на переставные и самоходные. В строи- тельстве наиболее широко используют переставные гидромониторы, которые перемещают в пределах площадки тракторами или переставляют грузоподъем- ными кранами.
Грунт, размытый гидромонитором, может подаваться к месту укладки по канавам и лоткам. Такое безнапорное самотечное транспортирование можно применять лишь в тех случаях, когда местность имеет уклон в сторону нужного направления движения пульпы. Такой способ транспортировки применяется довольно редко.
При напорном транспорте, применяемом наиболее широко, пульпа само- теком поступает в приямок, называемый зумпфом, который устраивают у места стоянки гидромонитора. Из приямка пульпа засасывается грунтовым насосом (землесосом), подается в напорный пульпопровод, по которому транспортиру- ется к месту укладки.
8.3.ПОРЯДОК ПРОВЕДЕНИЯ РАБОТЫ
8.3.1.Используя лабораторный практикум, плакаты и кинофильм, изу- чить общее устройство и назначение машин и оборудования для гидромехани- ческой разработки грунтов.
8.3.2.Определить основные параметры и производительность гидромони- тора по исходным данным варианта (табл. П.6), используя выражения (8.1) – (8.4).
Техническая производительность гидромонитора (по воде):
ПТ |
= 3600 |
Q |
, м3/ч, |
(8.1) |
|
q |
|||||
|
|
|
|
где Q – расход воды через насадку, м3/с; q – удельный расход воды для размы- тия и транспортировки единицы объёма грунта, q = 3…5 – для мелкозернистого песка, q = 10…15 – для жирной глины.
54

Q = F |
V |
, м3/с, |
(8.2) |
|
НАС |
|
|
|
|
где FНАС – площадь поперечного сечения отверстия насадки, м2; V – скорость |
||||
истечения струи, м/с. |
|
|
|
|
F = π D2 |
/ 4 , м2, |
(8.3) |
||
НАС |
|
|
|
|
где D – диаметр насадки гидромонитора, м. |
|
|
|
|
|
|
|
|
|
V = αϕ |
2gH , м/с, |
(8.4) |
||
где α – коэффициент сжатия струи, α ≈ 1; ϕ – коэффициент скорости, ϕ = 0,94; g – ускорение свободного падения; Н – напор у насадки гидромонитора, м.
8.4. ФОРМА ОТЧЁТА
8.4.1.Цель работы.
8.4.2.Описание назначения, устройства и классификации машин и обору- дования для гидромеханической разработки грунтов.
8.4.3.Определение основных параметров и производительности гидро- монитора по формулам (8.1) – (8.4).
8.4.4.Формулирование кратких выводов по лабораторной работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.Поясните особенность гидромеханической разработки грунтов.
2.Из чего состоит землесосный снаряд?
3.Какие функции выполняют грунтовый насос и фрезерный рыхлитель?
4.Поясните устройство и принцип действия гидромонитора.
5.Как определяется техническая производительность гидромонитора?
ЛАБОРАТОРНАЯ РАБОТА №9
ИЗУЧЕНИЕ КЛАССИФИКАЦИОННЫХ ПРИЗНАКОВ, РАБОЧЕГО ПРОЦЕССА И ОБЩЕГО УСТРОЙСТВА ОДНОКОВШОВЫХ СТРОИТЕЛЬНЫХ ЭКСКАВАТОРОВ
9.1. ЦЕЛЬ РАБОТЫ
Цель работы заключается в изучении классификационных признаков, рабо- чего процесса и общего устройства одноковшовых строительных экскаваторов, что позволяет сформировать обстоятельное представление о них.
55
9.2. ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Экскаватор – это землеройная машина ковшового типа. Строительные экс- каваторы предназначены для разработки грунтов до IV категории включительно.
9.2.1. Классификационные признаки одноковшовых экскаваторов
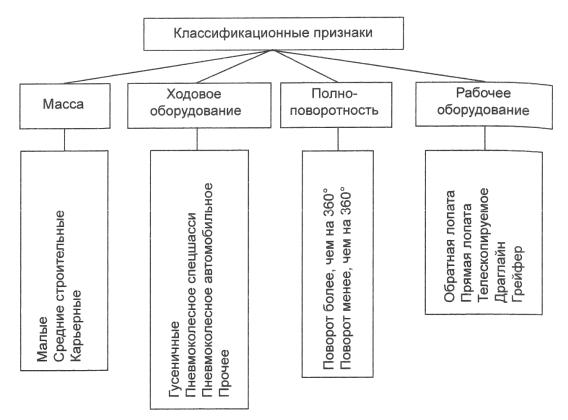
Существуют различные подходы к классификации этого типа машин, раз- личающиеся как выбором классификационных признаков (рис. 9.1) так и диапа- зонами их численных значений.
Рис. 9.1. Возможные классификационные признаки одноковшовых экскаваторов
В соответствии со стандартом РФ одноковшовые экскаваторы следует подразделять (табл. 9.1) на группы, различающиеся массой, вместимостью ковша и мощностью двигателя. Термин «гидравлический» означает, что сило- вой привод рабочего оборудования и управление им осуществляется гидравли- ческими исполнительными механизмами.
Термин «навесной» означает, что экскаваторное оборудование с ме- ханизмами управления им навешивается в качестве сменного на другую маши- ну (пневмоколесный бульдозер, пневмоколесный фронтальный погрузчик, ав- тогрейдер и т. д.).
56
|
|
|
|
Таблица 9.1 |
|
Классификация гидравлических одноковшовых экскаваторов. |
|||||
№ |
|
|
Ёмкость |
Мощность |
|
Масса, т |
Описание |
двигателя, |
|
||
группы |
ковша, м3 |
|
|||
|
|
|
|
кВт |
|
1 |
3,5 |
Навесной |
0,15…0,40 |
15…25 |
|
|
6,5 |
Полноповоротный |
|
||
|
|
|
|
||
|
|
|
|
|
|
2 |
6,5 |
Неполноповоротный |
0,25…0,65 |
25…40 |
|
|
|
|
|
||
|
9,5 |
Полноповоротный |
|||
|
|
|
|
||
3 |
16,0 |
Полноповоротный |
0,40…1,00 |
40…60 |
|
4 |
25,0 |
Полноповоротный |
0,65…1,66 |
60…90 |
|
5 |
40,0 |
Полноповоротный |
1,00…2,50 |
90…120 |
|
6 |
70,0 |
Полноповоротный |
1,60…4,00 |
100…210 |
|
Термин «неполноповоротный» означает, что экскаваторное оборудование вращается относительно вертикальной оси менее чем на 360° (обычно на 180°).
Термин «полноповоротный» означает, что экскаваторное оборудование смонтировано на поворотной платформе и вращается вместе с ней относитель- но вертикальной оси в любом направлении более, чем на 360°.
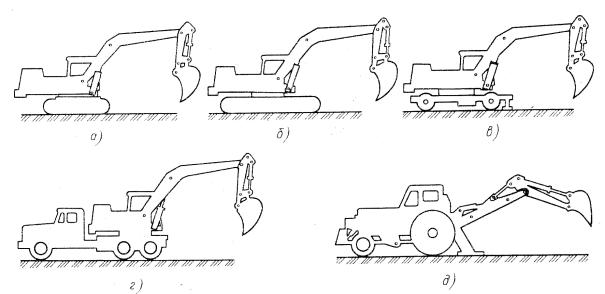
Классификация экскаваторов по типу ходового оборудования представ- лена на рис. 9.2.
Рис. 9.2. Классификация экскаваторов по типу ходового оборудования:
а– гусеничный; б – гусеничный с увеличенной поверхностью гусениц;
в– пневмоколёсный; г – на специальном шасси; д – на базе трактора
Классификация экскаваторов по типу подвески рабочего оборудования представлена на рис. 9.3.
57
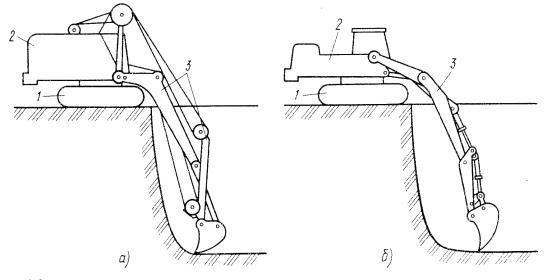
Рис. 9.3. Классификация экскаваторов по типу подвески рабочего оборудования:
а – с гибкой подвеской; б – с жёсткой подвеской; 1 – ходовое оборудование; 2 – поворотная платформа; 3 – рабочее оборудование
Маркировка отечественных строительных экскаваторов строится в соот- ветствии со схемой: ЭО-А Б В Г. В ней ЭО расшифровывается как «экскаватор одноковшовый строительный», а возможные значения литер приведены в табл. 9.2.
|
|
|
Таблица 9.2 |
|
|
Условные обозначения, используемые при маркировке |
|||
Литера |
Кодируемое свойство |
Шифр |
Расшифровка |
|
всхеме |
|
|
|
|
|
|
1 |
до 0,40 |
|
|
|
2 |
до 0,65 |
|
А |
Вместимость ковша, м3 |
3 |
до 1,00 |
|
4 |
до 1,25 |
|
||
|
|
|
||
|
|
5 |
до 1,60 |
|
|
|
6 |
до 2,50 |
|
|
|
1 |
гусеничное |
|
Б |
Ходовое оборудование |
2 |
гусеничное уширенное |
|
3 |
пневмоколёсное |
|
||
|
|
|
||
|
|
4 |
автомобильного типа |
|
|
|
1 |
гибкая подвеска |
|
В |
Подвеска рабочего |
2 |
жёсткая подвеска |
|
оборудования |
3 |
телескопическое |
|
|
|
|
|||
|
|
4 |
резервная группа |
|
Г |
Модель по заводской нормали |
произвольная маркировка |
|
|
Более подробная индексация строительных экскаваторов приведена на рис. 9.4.
58

Рис. 9.4. Структура индексов одноковшовых строительных экскаваторов
59

9.2.2. Рабочий процесс одноковшового экскаватора
Спецификой рабочего процесса одноковшового экскаватора является его цикличность. Рабочий цикл состоит из следующих последовательно выполняе- мых основных операций:
1)рыхление грунта и захват его ковшом (копание);
2)перемещение грунта в ковше к месту укладки путем поворотного дви- жения рабочего оборудования;
3)выгрузка грунта из ковша в транспортное средство или в отвал путем его раскрывания, поворота или опрокидывания;
4)возвратное движение рабочего оборудования в зону копания.
У экскаватора с рабочим оборудованием нижнего копания (обратная ло- пата и драглайн) помимо основных операций рабочий цикл включает дополни- тельные, связанные с подъемом рабочего оборудования выше уровня стояния машины перед поворотом его на выгрузку и с опусканием его на дно траншеи или выемки перед началом копания.
Гидравлический стенд для воспроизведения операций рабочего цикла од- ноковшового экскаватора с оборудованием обратная лопата представлен на рис. 9.5.
Рис. 9.5. Гидравлический стенд одноковшового экскаватора с рабочим обору- дованием обратная лопата:
1 – опорно-поворотное устройство (ОПУ); 2 – поворотная платформа; 3 – рабочее оборудование; 4 – пульт управления; 5 – место оператора
60