

Методическое пособие 401
.pdf
|
|
|
|
|
|
|
|
Таблица 3 |
|
|
Варианты заданий |
|
|
|
|||
|
Параметры |
Параметры |
|
|
|
|
||
|
генератора рав- |
|
Параметры |
|||||
|
гауссовского |
|
||||||
|
номерно распреде- |
|
АРСС-фильтра случайного |
|||||
|
случайного |
|
||||||
|
ленных случайных |
|
|
процесса |
||||
Вариант |
процесса |
|
|
|||||
величин |
|
|
|
|
||||
|
|
|
|
|
|
|
||
|
Разрядно |
Разрядно |
Математи |
Диспер |
|
Тип |
|
|
|
сть слова |
сть |
ческое |
|
фильтра |
|
Коэффициенты |
|
|
|
регистра |
ожидание |
сия |
|
|
|
|
|
|
|
|
|
|
|
||
1 |
5 |
6 |
0,1 |
1,5 |
|
АР |
|
а1= 0,2; а2= -0,7 |
2 |
6 |
9 |
0,5 |
2,2 |
|
АР |
|
а1= 0,6; а2= -0,2 |
3 |
4 |
5 |
0,2 |
1,1 |
|
СС |
|
с1= 0,3; с2= -0,9 |
4 |
5 |
7 |
0,3 |
4,5 |
|
АР |
|
а1= -0,4; а2= 0,7 |
5 |
4 |
9 |
0,0 |
2,7 |
|
СС |
|
с1= -0,2; с2= -0,7 |
6 |
5 |
11 |
0,4 |
1,8 |
|
СС |
|
с1= -0,5; с2= 0,4 |
7 |
4 |
7 |
0,5 |
3,6 |
|
СС |
|
с1= 0,7; с2= -0,8 |
8 |
6 |
6 |
0,3 |
0,6 |
|
АР |
|
а1= -0,9; а2= 0,6 |
9 |
5 |
9 |
0,4 |
2,9 |
|
СС |
|
с1= 0,5; с2= 0,1 |
10 |
4 |
7 |
0,1 |
4,7 |
|
АР |
|
а1= 0,7; а2= -0,1 |
11 |
6 |
11 |
0,0 |
2,5 |
|
АР |
|
а1= 0,4; а2= -0,3 |
12 |
5 |
7 |
0,3 |
1,6 |
|
СС |
|
с1= 0,6; с2= 0,3 |
13 |
6 |
9 |
0,5 |
0,7 |
|
АР |
|
а1= 0,6; а2= 0,2 |
14 |
4 |
7 |
0,8 |
3,0 |
|
СС |
|
с1= -0,5; с2= 0,2 |
15 |
5 |
11 |
0,2 |
2,2 |
|
АР |
|
а1= -0,2; а2= 0,7 |
3. Используя стандартный генератор равномерно распределенных случайных чисел, сформировать генератор белого гауссовского шума. Параметры генератора выбираются из табл. 3 в зависимости от номера варианта. Вывести график полученной реализации случайного сигнала, его СПМ, математическое ожидание и дисперсию, а также гистограмму.
Изменение математического ожидания и дисперсии следует производить по следующей формуле:
ri Ri ,
где ri – i-й отсчет выходного сигнала; – требуемое математическое ожидание; Ri – i-й отсчет исходного
19
случайного сигнала с нулевым математическим ожиданием и единичной дисперсией; 2 – требуемая дисперсия.
4.Получить случайный процесс, используя метод формирующего фильтра. Тип формирующего фильтра и его коэффициенты выбираются из табл. 3 в зависимости от номера варианта. Для всех вариантов порядок используемых фильтров
–2.
5.Вывести график полученного случайного сигнала, математическое ожидание и дисперсию, реальную и теоретическую СПМ, а также гистограмму полученной реализации.
Контрольные вопросы
1.Чем объясняется широкое применение моделей случайных сигналов как моделей информационных процессов при проектировании и отладке информационно-измерительных систем?
2.По какому принципу работают генераторы псевдослучайных последовательностей с равномерным распределением?
3.Какими способами можно преобразовать случайную величину с равномерным распределением в «гауссовскую»?
4.Чем отличаются спектры белого равномерного и белого гауссовского случайного процесса?
5.Перечислите методы моделирования гауссовских случайных процессов.
6.Чем отличаются спектры случайных процессов, построенных с помощью АР-фильтров от спектров случайных процессов, построенных с помощью СС-фильтров?
20

Лабораторная работа № 3 Моделирование инерциальной навигационной системы
Цель работы: научиться моделировать свойства и характеристики навигационной системы
Теоретические сведения
Моделирование проводится на примере бесплатформенной инерциальной навигационной системы (ИНС). В отличие от платформенной ИНС. блок чувствительных элементов (ЧЭ) бесплатформенной ИНС расположен жестко на борту объекта. Следовательно, оси чувствительности элементов изменяют свое положение в пространстве вместе с объектом. В этих условиях возникает задача: как определить угловые параметры, характеризующие положение объекта относительно выбранной системы координат, как определить вектор скорости в этой системе координат, а затем сами координаты объекта. Рассмотрим решение наиболее массовой задачи, когда определяют параметры движения относительно географического сопровождающего трехгранника. Решение зависит от вида используемых измерителей параметров углового движения.
Такие измерители позволяют измерять:
угловые скорости объекта в связанной с объектом системе координат (лазерные гироскопы, волоконнооптические гироскопы, динамически настраиваемые гироскопы, твердотельные волновые гироскопы, обычные и микромеханнческне гнротахометры - все они могут быть названы датчиками угловой скорости (ДУС));
углы поворота объекта (одноосные гиростабилизаторы. интегрированный выходной сигнал ДУС):
направляющие косинусы (гироскопы со сферическим ротором – электростатические, магнитные, с газовым подвесом).
21

Системы координат. Кинематические уравнения и преобразование координат
Алгоритм инерциальной навигационной системы [6] представляет собой замкнутую систему аналитических зависимостей, позволяющую по входным данным (показаниям гироскопов и акселерометров, введенным начальным данным) определять необходимые выходные величины. Схему, изображающую функциональные связи между отдельными аналитическими зависимостями, называют иногда моделирующей схемой алгоритма.
Опишем системы координат и связи между ними, а также модели фигуры Земли и гравитационного ускорения [7].
В качестве модели фигуры Земли будем использовать эллипсоид с параметрами Ф.Н. Красовского:
- большая полуось а= 6 378 245 м; - малая полуось b = 6 356 856 м;
- сжатие a b 0,003352 ; a
- квадрат первого эксцентриситета
|
|
|
a |
2 |
b |
2 |
|
|
2 |
|
|
|
|||
|
|
|
|
|
|||
|
|
|
a |
2 |
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
0,006692
.
При моделировании будем использовать правую декартову систему координат.
1. Инерциальная геоцентрическая экваториальная система координат i(i1, i2, i3) (рис. 11). Начало системы координат (СК) находится в центре Земли. Орт i2 направлен вдоль оси вращения Земли, орты i1, i3 лежат в плоскости экватора, причем в начальный момент времени t0 орт i3 лежит в плоскости Гринвичского меридиана.
СК i сохраняет неизменное угловое положение по отношению к направлениям на удаленные звезды.
22
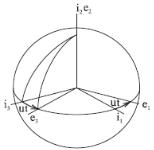
Рис. 11. Инерциальный и земной геоцентрические базисы
2. Земная геоцентрическая экваториальная система координат е (e1, e2, e3) (рис. 11). Начало СК находится в центре Земли. Орт e2 направлен вдоль оси вращения Земли, орты e1, e3 лежат в плоскости экватора, причем орт e3 в любой момент времени находится в плоскости Гринвичского меридиана. Орты e1, e3 вращаются вместе с Землей с угловой скоростью u = 7,29·10–51/с вокруг орта e2. В начальный момент времени t0 орты системы e совпадают с одноименными ортами системы i. Ориентация СК е относительно i в произвольный момент времени t описывается матрицей направляющих косинусов Cei.
В обозначении матрицы направляющих косинусов Cei (табл. 4) верхние индексы показывает название исходного базиса (правый индекс) и конечного базиса (левый индекс). В нашем примере Cei обозначает преобразование от базиса i к
базису е. В обозначении матрицы угловой скорости
ei k
верхние индексы используют аналогично, а нижний индекс показывает, на какую систему координат проектируется угловая скорость.
23
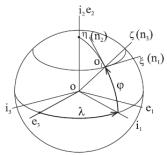
Таблица 4
Матрица направляющих косинусов
Cei |
i1 |
i2 |
i3 |
e1 |
cos ut |
0 |
– sin ut |
|
|
|
|
e2 |
0 |
1 |
0 |
|
|
|
|
e3 |
sin ut |
0 |
cos ut |
|
|
|
|
3. Географический сопровождающий трехгранник g (O1, n1, n2, n3) (рис. 12). Начало трехгранника O1 находится в центре масс объекта. Орт n3 направлен вдоль вертикали в точке нахождения объекта, орты n1, n2 лежат в плоскости местного горизонта, причем орт n2 лежит также в плоскости меридиана и направлен на Север, а орт n1 направлен на Восток. Часто используют обозначения осей или E N H.
Рис. 12. Географический сопровождающий трехгранник
Угловое положение базиса g относительно базиса е определяется углами долготы и географической широты φ точки местоположения объекта.
Взаимная ориентация систем координат описывается матрицей Cge (табл. 5).
24

Таблица 5
Матрица направляющих косинусов
Cge |
e1 |
e2 |
e3 |
n1 |
cos |
0 |
– sin |
|
|
|
|
n2 |
– sin φ sin |
cos φ |
– sin φ cos |
|
|
|
|
n3 |
cos φ sin |
sin φ |
cos φ cos |
|
|
|
|
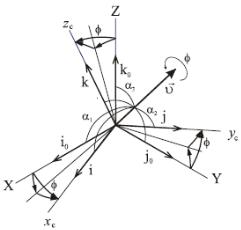
4. Приборная система координат b (p1, p2, p3). Начало СК находится в месте установки основания приборного блока. Орты p1, p2, p3 направлены параллельно строительным осям объекта, орт p1 – вдоль поперечной, орт p2 – вдоль продольной, орт p3 – вдоль вертикальной осей. Эти оси обозначают также буквами xyz или xcyczc.
Угловое положение приборной СК относительно географического трехгранника b описывается тремя углами: угол курса k, угол тангажа , угол крена (рис. 13).
Рис. 13. Углы поворота объекта с курсом
Взаимная ориентация СК b относительно g описывается таблицей направляющих косинусов Cbg табл. 6.
25

|
|
|
|
Таблица 6 |
|
|
Матрица направляющих косинусов |
|
|
||
Cbg |
n1 |
n2 |
|
n3 |
|
p1 |
cos cos k + |
–cos sin k + |
|
– sin cos |
|
+ sin sin sin k |
+ sin sin cos k |
|
|
||
|
|
|
|
||
p2 |
cos sin k |
cos cos k |
|
sin |
|
p3 |
sin cos k – |
–sin sin k – |
|
cos cos |
|
– cos sin sin k |
– cos sin cos k |
|
|
||
|
|
|
|
||
Если положение объекта в азимутальной (горизонтальной) плоскости задают не углом курса k, а углом рыскания , как показано на рис. 14, матрица Cbg имеет вид
(табл. 7).
Рис. 14. Углы поворота объекта с рысканьем
|
|
|
|
Таблица 7 |
|
|
Матрица направляющих косинусов |
|
|
||
Cbg |
n1 |
n2 |
|
n3 |
|
p1 |
cos cos k – |
cos sin + |
|
– sin cos |
|
– sin sin sin |
+ sin sin cos |
|
|
||
|
|
|
|
||
p2 |
–cos sin |
cos cos |
|
sin |
|
p3 |
sin cos + |
sin sin – |
|
cos cos |
|
+ cos sin sin |
– cos sin cos |
|
|
||
|
|
|
|
||
Приведенное преобразование можно выразить с помощью параметров Родрига-Гамильтона, которые являются
26
компонентами четырехмерного комплексного числа – кватерниона. Кватернион поворота системы координат из одного положения в другое имеет вид:
1 где i – параметры
Родрига-Гамильтона); 1 –
|
|
|
|
|
|
i |
2 j |
3 |
k |
4 |
, |
кватерниона (или параметры скалярная часть кватерниона;
|
|
|
|
|
i |
2 j |
3 |
k |
4 – векторная; |
i, j , k
– орты связанной
системы координат.
Кватернион описывает поворот тела (связанной с ним системы координат) относительно мгновенной оси на угол
(рис. 15).
Рис. 15. Поворот системы координат
|
1 |
cos |
, |
2 |
l sin |
, |
3 |
msin |
, |
4 |
n sin |
, |
|
2 |
|
2 |
|
2 |
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
где l, т. п – направляющие косинусы углов ai (i = 1,2,3 соответственно), определяющих положение оси поворота. Иногда кватернион записывают в виде:
|
|
|
|
|
0 i |
1 j |
2 |
k |
3 |
или в виде
27

i 1 j 2 k 3 4
Впрограмме лабораторной работы используется последняя форма. Для нее матрица направляющих косинусов может быть представлена через параметры РодригаГамильтона следующим образом:
C |
|
21 22 23 24 |
2 1 2 |
3 4 |
|
2 1 3 2 4 |
|
|
|||||||||||||||
|
2 1 2 3 |
4 |
1 2 |
3 |
4 |
2 1 4 |
2 3 |
|
|
||||||||||||||
|
bg |
|
|
|
|
|
|
|
|
|
2 |
2 |
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
2 |
|
4 |
|
|
3 |
|
2 |
|
4 |
|
2 |
|
3 |
|
2 |
2 |
2 2 |
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
1 |
2 |
3 |
4 |
|
||||||
Для параметров кватерниона справедливо соотношение:
1 |
2 |
3 |
4 |
1. |
2 |
2 |
2 |
2 |
|
Отсюда, диагональные элементы можно представить в
виде: |
|
|
|
|
|
|
|
|
1 2 2 |
|
|
|
|
2 |
2 |
|
2 |
|
2 |
2 |
|||||||
1 |
|
2 |
|
|
3 |
|
|
4 |
|
2 |
|
3 |
|
|
|
|
|
|
|
1 2 |
|
||||||
|
2 |
|
2 |
|
2 |
|
2 |
2 |
2 |
|
|||
|
1 |
|
|
2 |
|
|
3 |
|
4 |
1 |
|
3 |
|
2 |
2 |
2 |
2 |
1 2 2 |
2 |
||||||||
|
1 |
|
|
2 |
|
3 |
|
4 |
1 |
2 |
|
||
Текущие значения параметров находят из кинематических уравнений. Если рассматривают движение в инерциальной системе координат, уравнения имеют вид:
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
2 |
3 |
|
||||||||||||||||||||
|
|
1 |
|
2 |
|
z |
|
|
|
|
y |
|
|
|
|
x |
|
4 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2 |
|
|
1 |
x |
3 |
|
y |
|
||||||||||||||||
|
|
2 |
|
|
|
|
z |
|
|
|
|
|
|
|
4 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||
3 |
|
|
|
|
|
2 |
|
|||||||||||||||||
|
|
|
2 |
y |
|
|
1 |
|
x |
|
|
|
|
z |
|
4 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
4 |
|
|
1 |
2 |
z |
|
||||||||||||||||||
|
|
2 |
|
|
|
|
x |
|
|
|
y |
|
|
|
3 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Ввекторно-матричном виде уравнения можно
представить следующим образом:
28