

Динамика точки и системы / ДИНАМИКА
.pdf
|
mg |
(1−e− |
k |
||
|
|
t ). |
|||
v = |
m |
||||
k |
|||||
|
|
|
|
||
Предельная скорость падения
vпред |
= |
mg |
(6) |
|
k |
||||
|
|
51 |
R = k vпред= k |
mg |
= mg |
|
|
|||||||||||||||
k |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Из (5) находим закон движения: |
|
|
|
|
|
|
|
||||||||||||
|
mg |
|
t |
|
mg |
|
t |
k |
t dt |
|
|||||||||
|
|
|
|
e− |
|
|
|||||||||||||
x = |
dt − |
|
m |
(7) |
|||||||||||||||
|
|
|
|||||||||||||||||
|
|
k |
0 |
|
|
k |
0 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
или |
|
|
|
|
m2 g |
|
|
|
|
k |
|
|
|
||||||
|
|
mg |
|
|
|
|
− |
t |
|
|
|||||||||
x = |
|
t − |
|
|
|
). |
|
||||||||||||
k |
|
k 2 (1− e |
|
|
m |
(8) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
52
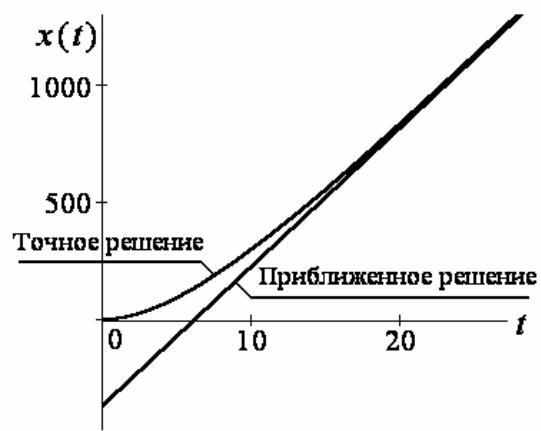
Приближенная формула
x = |
mg |
t − |
m2 g |
. |
(9) |
|
k |
k 2 |
|||||
|
|
|
|
Движение по истечении некоторого промежутка времени становится равномерным. 53
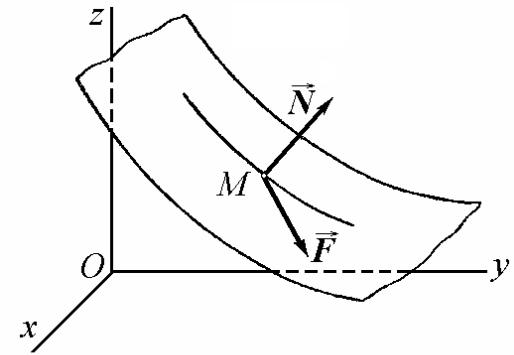
3.8. Движение несвободной материальной точки
Материальная точка называется несвободной, если ее движение ограничено некоторыми условиями
(связями).
Уравнение связи
Гладкая поверхность:
f (x, y, z) = 0. |
(1) |
54
F
Или
m |
d 2 r |
= F + N. |
|
||
|
|
(2) |
|||
dt |
2 |
||||
|
|
|
|||
- заданная сила; N - нормальная сила реакции.
|
d |
2 |
x |
|
|
|
|
|
|
|
|
||||
m |
|
|
= Fx + Nx , |
|
|||
dt |
2 |
|
|
||||
|
|
|
|
|
|
||
|
|
2 |
|
|
|
|
|
|
d |
y |
|
|
|
||
|
|
|
|
||||
m |
|
|
= Fy + N y , |
|
|||
dt |
2 |
|
|
(3) |
|||
|
|
|
|
||||
|
|
|
|
|
|
||
|
d |
2 |
z |
|
|
|
|
|
|
|
|
||||
m |
|
|
= Fz + Nz . |
|
|||
dt |
2 |
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
55

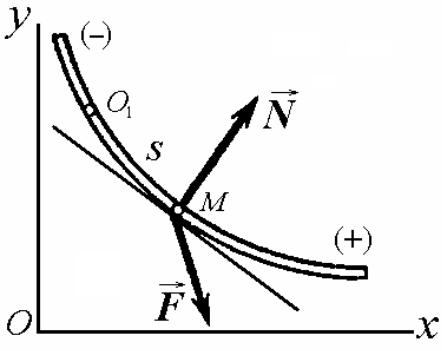
Для плоской линии: |
f (x, y) = 0. |
(4) |
F и |
|
N лежат с линией в одной плоскости. |
||||||||
m |
d2 x |
= Fx |
+ Nx |
, m |
d2 y |
= Fy |
+ Ny . (5) |
|||
dt |
2 |
dt |
2 |
|||||||
|
|
|
|
|
|
|||||
56
Дифференциальные уравнения движения несвободной точки в
естественной форме (в форме Эйлера):
m |
d2s |
= F , m |
v2 |
= Fn + N. |
(6) |
|
dt2 |
|
|
||||
|
|
|
|
57 |
||
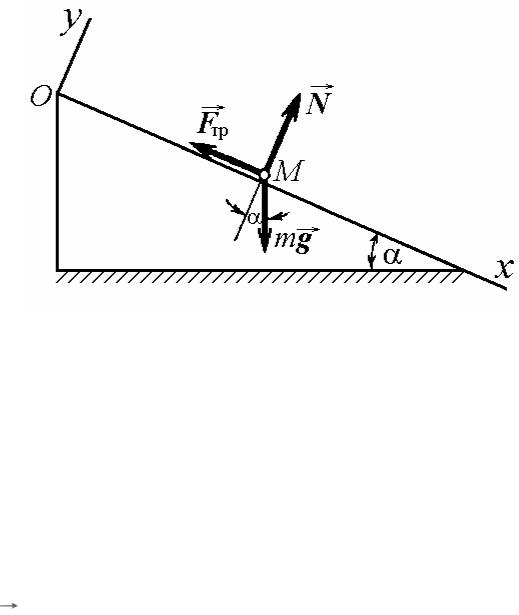
Пример 3.2. Найти закон движения несвободной точки массой m по шероховатой наклонной плоскости под действием силы тяжести, а также реакцию плоскости N. Угол наклона плоскости к горизонту .
Решение. Уравнение связи y = 0. Проекции силы тяжести mg
Fx = mgsin , |
Fy = – mgcos . |
|
58 |
Дифференциальные уравнения движения точки:
m |
d 2 x |
= mg sin − fN, |
(1) |
||
dt |
2 |
|
|||
|
|
|
|
||
|
d 2 y |
= −mg cos + N. |
(2) |
||
m dt |
2 |
|
|||
|
|
|
|
|
|
m |
d 2 y |
= 0, поэтому : |
|
|
dt |
2 |
|
||
|
|
|
|
|
|
|
|
N = mgcos . |
(3) |
59
Подставляя (3) в (1) и сокращая на m, получим:
d 2 x |
= g(sin − f cos ), |
|
||
dt2 |
|
(4) |
||
dv |
|
= g(sin − f cos ). |
|
|
dt |
|
|||
|
|
|
||
Дважды интегрируя (3) и используя условия (при t = 0 x = x0, а v = v0), получаем:
v =v0 + g(sin − f cos )t, |
(5) |
x = x |
+v |
t + g(sin − f cos ) |
t2 |
|
|
|
. |
(6) |
|||
|
|||||
0 |
0 |
|
2 |
|
|
|
|
|
|
60 |
|