

4413
.pdf2.2. Стабилизация управляемых колес автомобиля
Стабилизация управляемых колес – это их способность сохранять нейтральное положение при прямолинейном движении и самостоятельно возвращаться в нейтральное положение в случае отключения от него. При хорошей стабилизации управляемых колес можно длительно сохранять прямолинейность движения без вмешательства водителя. При плохой стабилизации всякие случайные отклонения управляемых колес должны выправляться водителем путем воздействия на рулевое колесо, что делает управление машиной излишне утомительным. Хорошая стабилизация помогает управляемым колесам самостоятельно возвращаться в нейтральное положение в конце поворота.
При движении автомобиля его управляемые колеса нагружены силами Рк сопротивления качению. Эти силы, действуя на плече а (рис.8), стремятся повернуть колеса вокруг шкворней (поворотных стоек).
При одинаковой величине сил сопротивления, т.е. когда РК1=РК2, колеса не поворачиваются, так как суммарный момент, действующий на рулевую систему, равен нулю. Если одно из колес испытывает сопротивление большее, чем другое, т.е. РК1+РК2 разность моментов, поворачивающих колеса вокруг шкворней, создаст дестабилизирующие силы в звеньях рулевой системы. Для уменьшения этих сил стремятся уменьшить плечо а действия сил сопротивления.
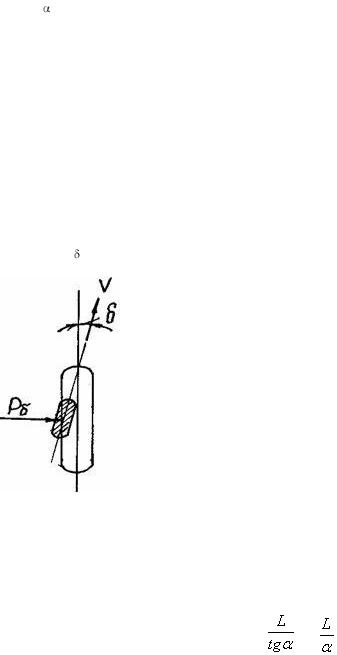
Рис. 8. Углы стабилизации управляемых колес автомобиля
Стабилизация управляемых колес обеспечивается тем, что шкворни расположены не вертикально, а наклонены как в поперечной (угол β на рис. 8), так и в продольной (угол γ) плоскостях, а управляемые колеса установлены не параллельно продольной плоскости автомобиля, а под углом развала ( ) в вертикальной плоскости и под углом схождения в горизонтальной плоскости.
При наличии поперечного наклона шкворня под углом β всякий выход колеса из нейтрального положения сопровождается подъемом передней части машины. Это следует из схемы на рис. 8, где точкой 2 показано положение колеса после его условного поворота на 180о вокруг шкворня. Если бы не было подъема передней части машины, то колесо должно было бы опуститься ниже поверхности дороги.
Поперечный наклон шкворней совместно с развалом колес уменьшает расстояние а между средней плоскостью колеса и точкой пересечения оси шкворня с поверхностью дороги. Это расстояние называется плечом обкатки колеса. Уменьшение плеча обкатки соответственно снижает величину поворачивающих моментов, создаваемых относительно оси шкворня силами сопротивления движению и силами торможения.
В зоне контакта колес с дорогой возникают дополнительные силы и моменты, которые увеличивают сопротивление качению и вызывают повышенный износ шин. Напряженность в зоне контакта шины с дорогой можно уменьшить путем выбора рациональных соотношений между углами развала и схождения колес. Угол схождения колес δ (рис. 8) осуществляется разностью расстояний ℓ и ℓ', замеренных между внутренними боковинами шин в горизонтальной плоскости, проходящей через центры обоих колес, установленных в нейтральное положение.
Установка колес с продольным наклоном шкворня под углом γ (рис. 8) создает момент боковых реакций на управляемые колеса относительно оси шкворня. Если принять, что результирующая боковая реакция приложена в середине площадки контакта, то она создаст относительно оси шкворня стабилизирующий момент с плечом b.
Углы установки управляемых колес современных отечественных автомобилей колеблются в следующих пределах:
Угол развала колес равен от 10' до 50' для легковых и от 45' до 1о30' для грузовых автомобилей; угол β поперечного наклона шкворня составляет от 5о30' до 7о50' для легковых и от 6о до 8о для грузовых автомобилей, а угол γ продольного наклона шкворня – от 0о до 2о для легковых и от 1о до 3о30' для грузовых автомобилей.
2.3. Поворот автомобиля с эластичными колесами и условия сохранения управляемости
При качении эластичного колеса автомобиля, нагруженного боковой силой, отпечаток на дорожном покрытии повернется относительно плоскости колеса, и оно будет двигаться не в плоскости своей симметрии, а под углом δ к ней (рис. 9).
Угол поворота δ называют углом увода колеса.
При движении автомобиля боковая сила может быть центробежной при повороте, может быть ветровой нагрузкой или составляющей силы веса автомобиля при его движении по дороге, имеющей поперечный уклон.
Результаты большого числа экспериментов, проведенных в различных странах различными исследователями, показали, что зависимость между углами увода и боковыми силами в общем случае нелинейна. При малых углах увода изменение отношения Рб/ сравнительно невелико и может считаться постоянным (Рб/ =Ку=const), а зависимость Рб=f(δ), следовательно, линейной. Отношение Рб/
сравнительно невелико и может считаться постоянным (Рб/ =Ку=const), а зависимость Рб=f(δ), следовательно, линейной. Отношение Рб/ получило название коэффициента сопротивления уводу.
получило название коэффициента сопротивления уводу.
Коэффициент сопротивления уводу Ку зависит от большого числа факторов, основными из них являются: размеры и конструкция колеса; давление воздуха в шине; величина сил, действующих на колесо; скорость движения; тип и состояние дорожного покрытия; форма траектории движения центра колеса (прямолинейная, криволинейная, кривизна траектории и скорость ее изменения по времени или пути); характер приложения сил, действующих на колесо, и скорость изменения этих сил.
Для шин легковых автомобилей отечественных марок «Москвич» и ГАЗ «Волга» коэффициент сопротивления уводу Ку имеет значения соответственно 360 и 470 Н/град.
При движении автомобиля с жесткими колесами центр его поворота определяется точкой О (рис. 10) пересечения прямых, являющихся продолжениями осей колес, а расстояние от этой точки до продольной плоскости симметрии автомобиля определяет радиус поворота R.
Этот радиус поворота равен
R = ≈ ,
где α – средний угол поворота управляемых колес.
При повороте автомобиля с эластичными колесами под действием центробежной силы возникает увод каждого колеса, что приводит к смещению центра поворота. Центр поворота О' в этом случае будет лежать на пересечении перпендикуляров, восстановленных из середины переднего и заднего мостов к направлениям их движения. Направление движения задней оси будет отклоняться от средней плоскости автомобиля на угол увода δВ, а направление движения передней оси – на угол увода δА.
Радиус поворота R' автомобиля в этом случае можно определить из схемы на рис. 10:
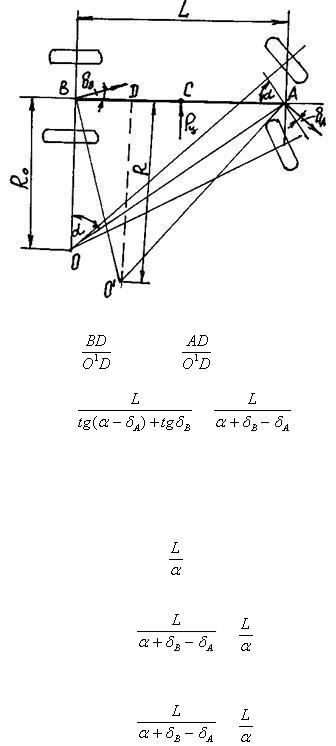
Рис. 10. Схема поворота автомобиля с эластичными колесами
= tgδB; |
|
= tg(α – δA) ; |
|
L = AD + BD = O'D tg(α – δA) + O'D tgδB ; |
|
||
O'D = R = |
≈ |
. |
(16) |
Из уравнения (16) следует, что величина действительного радиуса поворота R зависит не только от среднего угла α поворота управляемых колес, а также и от соотношения между углами увода передней δA и задней δВ осей.
Из уравнения (16) видно, что может быть три случая движения автомобиля:
1. Углы увода передней и задней осей равны (δA=δB). В этом случае радиус поворота определяется
выражением: |
|
|
R ≈ |
, |
|
т.е. он будет приблизительно равен радиусу поворота автомобиля с жесткими колесами; |
||
2. Угол увода передней оси больше угла увода задней оси (δA>δB). В этом случае: |
||
R ≈ |
> |
, |
т.е. радиус поворота автомобиля с эластичными колесами больше радиуса поворота автомобиля с |
||
жесткими колесами; |
|
|
3. Угол увода передней оси меньше угла увода задней оси (δA < δB). В этом случае: |
||
R ≈ |
< |
, |
т.е. радиус поворота автомобиля с эластичными колесами будет меньше радиуса поворота автомобиля с жесткими колесами.
В соответствии с этим автомобиль, имеющий угол увода передней оси больше, чем задней, называют обладающим свойством недостаточной поворачиваемости, а автомобиль, у которого угол увода передней оси меньше чем задней – обладающим свойством излишней поворачиваемости.
Автомобили, обладающие излишней и недостаточной поворачиваемостью, по-разному ведут себя при прямолинейном движении.
Если к автомобилю с излишней поворачиваемостью и движущемуся прямолинейно приложить боковую силу Рб , то из-за бокового увода колес траектория его движения изменится. Автомобиль начнет двигаться по окружности с центром, расположенным в точке О (рис. 10). Центробежная сила инерции Рц, как видно из рис. 10, будет направлена в ту же сторону, что и боковая сила Рб. Это еще увеличит углы увода, уменьшит радиус поворота, а следовательно, увеличит центробежную силу, что снова приведет к увеличению углов увода и т.д. Если при этом водитель не изменит положения управляемых колес для увеличения радиуса поворота, то может начаться занос задней оси автомобиля.
Составляя схему действия боковой и центробежной сил на автомобиль с недостаточной поворачиваемостью и движущийся прямолинейно, можно показать, что центробежная сила Рц будет направлена противоположно действующей силе Рб. Это приведет к уменьшению углов увода и выравниванию направления движения автомобиля.
Из формулы (16) следует, что при движении автомобиля с неповернутыми управляемыми колесами (угол =0) возможен такой случай, когда произойдет поворот автомобиля и начнется его движение по траектории с радиусом
R ≈
Физический смысл явления может быть объяснен тем, что при кратковременном действии боковой силы из-за увода колес, автомобиль начинает двигаться по кривой. Возникающая центробежная сила Рц увеличивает этот увод и в дальнейшем даже при прекращении действия кратковременной силы, вызывает движение по кривой все уменьшающегося радиуса.
Боковая сила может возникнуть из-за порыва ветра, наклона дороги и т.д., а скорость, при которой начнется движение автомобиля по кривой, получила название критической.
Величина центробежной силы, которая действует на повороте при движении автомобиля с критической скоростью, будет равна:
Pц = 
Подставляя в это выражение значение радиуса поворота, получим:
Pц =  (δB – δA)
(δB – δA)
Отсюда критическая скорость движения будет равна:
Vкр = 
Углы увода δB и δA могут быть выражены:
δB =  =
=  ,
,
δA =  =
=  ,
,
где PA и PB – составляющие центробежной силы, приходящейся на переднюю и заднюю оси автомобиля; a и b – продольные координаты центра масс автомобиля.
Подставляя эти значения δA и δB в выражение для критической скорости, получим:
|
Vкр = |
или окончательно |
|
Vкр = |
(17) |
где GA и GB – составляющие силы веса автомобиля, приходящиеся на переднюю и заднюю оси. |
|
Анализ выражения (17) позволяет |
установить, что увеличение продольной базы автомобиля |
увеличивает его критическую скорость и критическая скорость изменяется в зависимости от распределения силы веса автомобиля по осям и соотношения коэффициентов сопротивления уводу передней и задней осей.
Из выражения (17) следует также, что при анализе критической скорости возможны три случая:
1. |
= |
; Vкр = ∞, т.е. в этом случае критическая скорость весьма велика. |
2. |
> |
– подсчет по формуле (17) приведет к получению мнимых величин, т.е. критическая |
скорость невозможна вообще (автомобиль с недостаточной поворачиваемостью).
3. < – критическая скорость может иметь расчетное значение, при котором достаточно появление сколь угодно малой силы, чтобы автомобиль потерял управляемость (автомобиль с излишней поворачиваемостью).
Таким образом, для получения хорошей управляемости, автомобиль должен иметь параметры, обеспечивающие выполнение первого или второго условия.
Уравнения для определения (δB – δA), Рц и R связывают пять различных переменных величин R, , V, Pц
и(δB – δA). Если две из этих величин заданы, то остальные три будут иметь строго определенные значения. Например, если автомобиль движется по кругу заданного радиуса R с определенной скоростью V, то управляемые колеса должны быть повернуты на определенный угол α, центробежная сила Рц и углы увода δA
иδB будут иметь также вполне определенные значения.
Для количественного анализа параметров, от которых зависит управляемость автомобиля, строят график управляемости, используя при этом уравнение (16). Рассмотрим порядок построения графики управляемости для автомобиля с излишней поворачиваемостью.
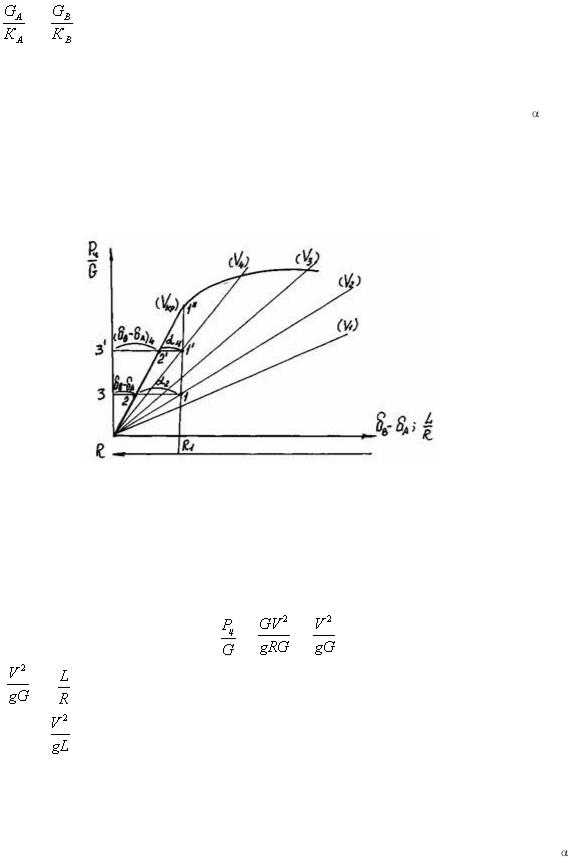
Отложим по оси абсцисс (рис. 11) разность δB–δA.
Рис. 11. График управляемости автомобиля
По оси ординат отложим удельную центробежную силу Рц/G. Зависимость между отношением Рц/G и разностью δB–δA будет аналогична зависимости между боковой силой и углом увода отдельного колеса. Для оценки влияния радиуса поворота отложим по горизонтальной оси также величину L/R. Из уравнения (16): L/R = α + δB – δA , т.е. для того, чтобы отложить величину L/R по оси абсцисс можно воспользоваться той же шкалой, что и для величины δB – δA. Для удобства пользования графиком под шкалой δB – δA и L/R нанесем еще шкалу значений R.
Для постоянной скорости движения автомобиля график функции Рц/G = f(L/R) выразится прямой, проходящей через начало координат, так как:
==
или |
= К |
, |
откуда К = |
, |
|
где К – угловой коэффициент.
Построив для нескольких постоянных скоростей, в том числе для расчетной критической скорости, эти зависимости, получим пучок прямых, проходящих через начало координат. Теперь каждый случай движения автомобиля можно характеризовать одной точкой на графике. Пусть, например, автомобиль движется по кривой с радиусом R1 и скоростью V2. Такой случай движения будет характеризоваться на графике точкой 1. Проведя горизонтальную прямую через эту точку, получим точку 2 ее пересечения с графиком для критической скорости и точку 3 пересечения с осью ординат. Отрезок 1-2 определит величину угла 2 поворота управляемых колес, отрезок 2-3 – величину разности (δB–δA)2.
Из рис. 11 следует, что если при движении по дуге того же радиуса увеличить скорость автомобиля до V4, то данный случай будет характеризоваться уже точкой 1', разность углов увода (δB – δA)4 колес тоже увеличится и будет равной отрезку 2'–3', а угол поворота α4 управляемых колес уменьшиться и определится длиной отрезка 1'–2'. При дальнейшем увеличении скорости угол поворота управляемых колес будет уменьшаться и при критической скорости (точка 1'') будет равен нулю. Автомобиль будет двигаться по кругу с

неповернутыми колесами и кривизна траектории его движения будет определяться только величиной разности углов увода δB–δA.
Кроме рассмотренных выше конструктивных и кинематических параметров при анализе управляемости автомобиля необходимо учитывать влияние на управляемость конструкции подвески и форму кузова автомобиля.
Влияние конструкции подвески на управляемость автомобиля объясняется зависимостью угла увода колес от их наклона к плоскости дороги. При повороте автомобиля колеса с независимыми (рычажными) подвесками наклоняются в сторону, противоположную от центра поворота и возникающие при этом дополнительные уводы колес увеличивают уводы от действия центробежных сил инерции. Чтобы не создавать для автомобиля условий избыточной поворачиваемости и тем самым повысить его управляемость, задние колеса автомобилей, как правило, устанавливают на зависимых подвесках.
Форма кузова легкового автомобиля оказывает существенное влияние на управляемость потому, что она определяет точку (метацентр) приложения равнодействующей сил, вызванных боковым ветром. Рассмотрим схему сил, действующих на прямолинейно движущийся автомобиль при наличии бокового ветра (рис. 12). Боковая сила Pб, вызванная ветром, приложена в метацентре кузова. У одних автомобилей эта точка расположена перед центром масс, у других – за ним.
Рис. 12. Схема сил, действующих на автомобиль при боковом ветре.
Действие бокового ветра вызывает увод передней и задней осей автомобиля. Если метацентр расположен впереди центра масс, то автомобиль начнет поворачиваться в направлении действия ветра. Это вызовет появление центробежной силы Pц, которая образуя с силой ветра Рб момент, увеличит стремление автомобиля к повороту. Если метацентр расположен за центром масс автомобиля, то при действии бокового ветра (боковая сила Рб'), автомобиль будет стремиться повернуться против ветра. Возникшая при этом центробежная сила Рц' будет стремиться уменьшить поворот автомобиля. Поэтому для обеспечения автомобилю наилучшей управляемости при боковом ветре, необходимо кузову придавать такую форму, чтобы метацентр был расположен за центром масс. Для смещения метацентра назад понижают капот двигателя, а в задней части применяют высокое оперение задних крыльев.
ПРИМЕРЫ РАСЧЕТОВ
Пример 1.
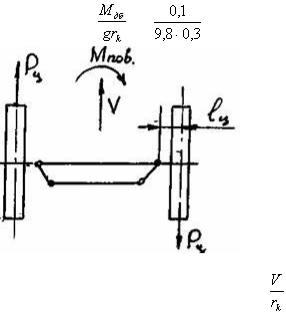
Автомобиль движется со скоростью V=25 м/с. Определить амплитудное значение момента, стремящегося повернуть колеса относительно поворотных стоек. Момент дисбаланса правого и левого колеса одинаковый и равен Мдб=0,1 Нм, радиус колес rк=0,3 м, длина поворотной цапфы ℓц=0,1 м. Неуравновешенные массы правого и левого управляемых колес смещены по фазе на 180о.
Определим величину неуравновешенной массы колес из условия, что
Мдб=mg·rk,
где m – масса на колесе, создающая дисбаланс.
Тогда m = |
= |
= 0,034 кг |
Амплитуда (наибольшее) значение момента от центробежных сил инерции, стремящегося повернуть колеса относительно поворотных стоек и нарушающего управляемость автомобиля, определяется при положении сил в горизонтальной плоскости (рис. 13).
Момент от центробежных сил определим по формуле:
Мпов = 2mω2rk·ℓц,
где ω – угловая частота вращения колеса автомобиля.
Рис. 13. Схема к примеру 1 п. 2
ω = =  = 83,3 с-3
= 83,3 с-3
где V – скорость движения автомобиля.
Амплитудное значение момента от центробежных сил равно:
Мпов = 2·0,034·83,32·0,3·0,1 = 14,15 Нм.
Пример 2.
Автомобиль, имеющий массу m=1400 кг, движется со скоростью V=20 м/с по дуге окружности, радиус которой равен R=110м. Продольная база автомобиля L=2,4м, расстояние от задней оси до центра масс равно b=1,1м. Найти суммарный стабилизирующий момент на управляемых колесах, возникающий в результате продольного наклона поворотных стоек на угол γ=2о. Радиус колес равен rk=0,28 м.
Стабилизирующий момент на управляемых колесах возникает в результате действия реактивной силы Rб относительно точки 1 – точки пересечения наклоненной оси поворотной стойки и линии окружности колеса
(рис. 14).
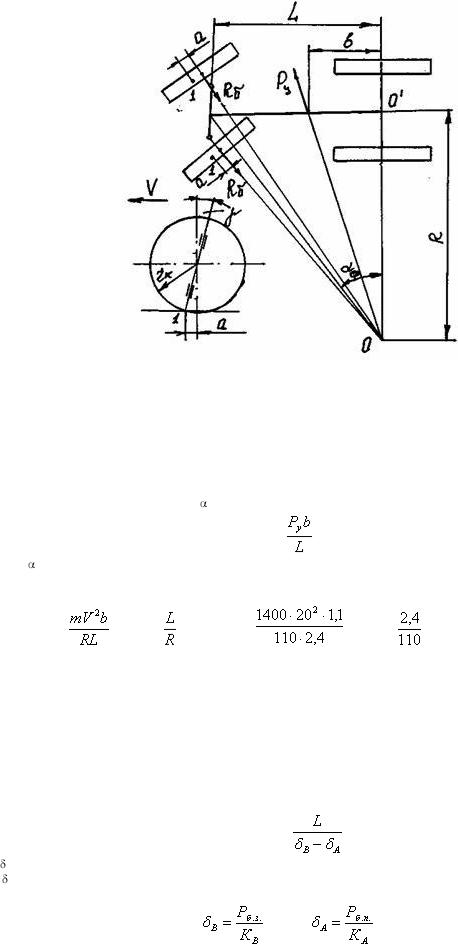
Рис. 14. Схема к расчету стабилизирующего момента на управляемых колесах Суммарный стабилизирующий момент равен:
Мст = 2·Rб·a,
где а – плечо действия силы Rб относительно точки 1.
Из условия равновесия автомобиля относительно точки О' (рис. 14) получим соотношение между силой Rб и центробежной силой Рц:
Rб = 
С учетом поворота колес на угол ср реакция колес Rб будет: |
|
||
|
Rб = |
·cosαср , |
|
где угол ср= arctg L/R (см. схему на рис. 14). |
|
|
|
Учитывая, что центробежная сила инерции Рц = mV2/R, а плечо а действия силы Rб = rk·sinγ, расчетная |
|||
формула для суммарного стабилизирующего момента принимает вид: |
|
||
Мст = 2· |
cos(arctg )·rk· sinγ = 2· |
cos(arctg |
)х х0,28·sin2o = 45,6 Нм |
Пример 3. |
|
|
|
На автомобиль, имеющий массу m=7400 кг и движущийся со скоростью V=16 м/с, действует поперечная боковая сила Рб, равная 10000 H и приложенная в центре масс автомобиля. Продольная база автомобиля L=3,7 м, расстояние от центра масс до задних колес b=0,9 м. Определить радиус R дуги окружности, описываемый автомобилем, если его управляемые колеса находятся в нейтральном положении, а коэффициенты сопротивления уводу передних и задних колес равны соответственно КА=1800 Н/град и КB=4800 Н/град.
Из формулы (16) следует, что при неповернутых управляемых колесах и при наличии уводов колес радиус поворота автомобиля равен:
R = |
, |
где Б - угол увода задних колес; А - угол увода передних колес.
Углы увода задних и передних колес равны:
;

где Рб.з. и Рб.п. - составляющие боковой силы Рб., действующие в точках В и А на заднюю и переднюю оси автомобиля (см. схему на рис.15).
Из условия равновесия автомобиля в горизонтальной плоскости определены силы в точках В и А:
Углы увода задних и передних колес
|
соответственно равны: |
|
|
; |
|
Рис.15. Схема к примеру 3п.2 |
; |
|
|
|
|
|
или в радианах соответственно: |
|
|
; |
. |
Радиус дуги окружности, описываемой автомобилем, равен: |
|
|
3. УСТОЙЧИВОСТЬ АВТОМОБИЛЯ
При изучении устойчивости автомобиля рассматривают его движение со всеми степенями свободы, кроме движения в направлении, перпендикулярном к опорной поверхности, и в направлении продольной оси автомобиля.
Исключение движения в направлении, перпендикулярном к опорной поверхности, естественно, поскольку отклонение от параметров возмущенного движения от параметров невозмущенного в этом направлении не может возрастать непрерывно. Характер изменения движения автомобиля в направлении его продольной оси (собственного движения), в том числе и устойчивость движения в этом направлении, определяется тяговыми и тормозными свойствами автомобиля.
В качестве угловых параметров при изучении устойчивости автомобиля обычно принимаются следующие:
1.Угол и угловая скорость продольного опрокидывания автомобиля.
2.Угол и угловая скорость крена автомобиля (угол и угловая скорость поперечного опрокидывания).
3.Угол и угловая скорость поворота автомобиля.
Таким образом, следует различать устойчивость по опрокидыванию (продольную и поперечную), по направлению движения (курсовая устойчивость) и по боковому смещению (боковая устойчивость).
Часть из тех параметров движения, которые характеризуют устойчивость автомобиля, являются управляемыми (угол и угловая скорость поворота, траектория направляющей точки), а часть – неуправляемыми (углы и угловые скорости поперечного и продольного опрокидывания).
Устойчивость автомобиля следующим образом связана с его управляемостью. Во многих случаях является желательным сохранение постоянными на некотором отрезке пути управляемых параметров движения автомобиля. У автомобиля, обладающего хорошей устойчивостью, приближение указанных параметров движения к желательным возможно без вмешательства водителя (т.е. без затраты им энергии на управление автомобилем) в сравнительно широком диапазоне возмущений. Поэтому вероятность приближения фактических параметров движения к желательным при прочих равных условиях тем выше, чем лучше устойчивость автомобиля.
Предельные значения кривизны траекторий различных точек автомобиля, а также скорости изменения кривизны часто ограничиваются из-за потери им устойчивости. Чем лучше устойчивость автомобиля, тем более широким может быть диапазон изменения параметров его движения, т.е. тем в большей степени фактические параметры движения могут приближаться к желательным.
3.1. Продольная устойчивость автомобиля
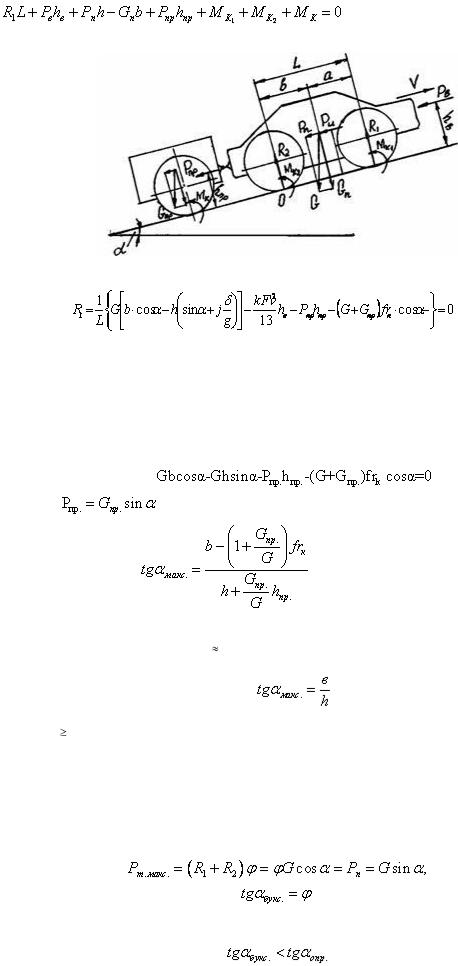
Продольная устойчивость автомобиля характеризуется возможностью его опрокидывания вокруг передней или задней оси. Рассмотрим общий случай движения автомобиля – ускоренное движение на подъеме с прицепом (рис. 16).
Уравнение моментов сил относительно точки О – возможной точки опрокидывания, имеет вид:
Приравняв нулю нормальную реакцию R1 на передние колеса, получим выражение, определяющее предельное по устойчивости состояние автомобиля:
Рис. 16. Схема сил при движении автомобиля на подъем
(18)
где формулы для сил Рв, Рn, Ри, Gn и моментов МК1, МК2, МК взяты из уравнения 11 для определения нормальной реакции R2. Принято, что радиусы rк колес автомобиля и прицепа равны.
Опрокидывание автомобиля через заднюю ось может произойти при преодолении максимального подъема из-за действия составляющей силы веса Рn, силы инерции Ри и при движении с максимальной скоростью из-за силы сопротивления воздуха Рв.
При движении автомобиля на максимальный подъем его скорость бывает мала и поэтому можно пренебречь силой сопротивления воздуха Рв. Можно принять также, что преодоление подъема происходит с установившейся скоростью (j=0), так как разгон на максимально допустимом подъеме невозможен.
При этих условиях получим:
Принимая |
, получим: |
(19)
Выражение (19) позволяет определить максимальную величину подъема, которую автомобиль с прицепом может преодолеть при установившейся скорости движения без опрокидывания.
При движении по хорошей дороге (f 0), без прицепа (Рпр.=0) величина подъема увеличится и станет равной:
Опрокидывание автомобилей обычных конструкций вокруг передней оси практически невозможно, так как расстояние в а, а для легковых автомобилей – величина h мала.
Автомобили по своим тяговым качествам или по сцеплению колес с дорогой не всегда могут въехать на предельный по опрокидыванию подъем. Поэтому при проектировании автомобиля необходимо установить, чем ограничивается максимальный угол подъема – опрокидыванием, буксованием или недостатком тяговой силы.
Весьма актуальным является анализ этого свойства для автомобилей повышенной проходимости, которые способны преодолевать большие подъемы и имеют высокое расположение центра масс. Для этих автомобилей ведущими являются все колеса и поэтому максимально допустимая по условиям сцепления с дорогой тяговая сила будет равна:
.
Для того, чтобы буксование автомобиля со всеми ведущими колесами началось до его опрокидывания, необходимо соблюдение следующего неравенства: