

4278
.pdf11
Лишние степени свободы – степени свободы, не оказывающие влияния на кинематику механизма.
На рис. 1.8 а представлен кулачковый механизм, число степеней свободы которого равняется двум. Лишнюю степень свободы дает звено 2 - ролик, которое не влияет на кинематику движения механизма. Удалив ролик из механизма, получим W=1 (рис. 1.8 б).
D |
|
C |
|
|
|
3 |
|
2 |
2 С |
|
В |
В |
|
1 |
|
|
|
1 |
|
|
А |
а |
А |
|
б |
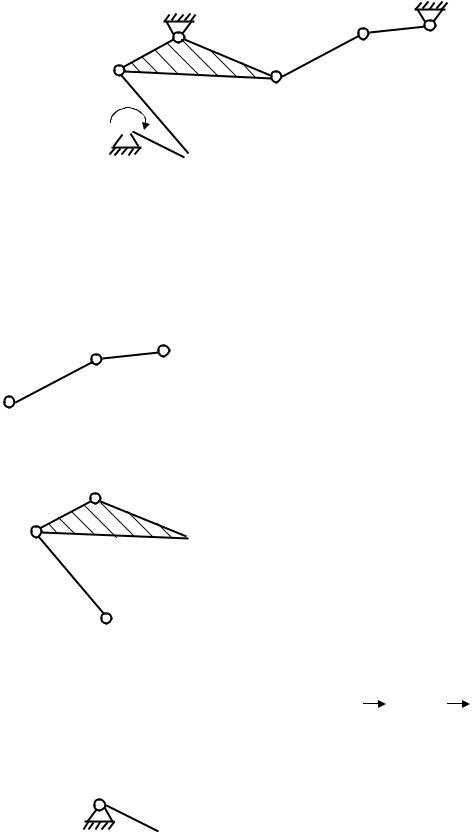
Рис. 1.8 Кинематическая схема кулачкового механизма Для упрощения анализа механизмов часто избавляются от высших ки-
нематических пар, заменяя их низшими. Одну высшую кинематическую пару можно заменить двумя низшими, и звеном, длина которого равна сумме радиусов кривизны соприкасающихся поверхностей, образующих высшую кинематическую пару. Высшая кинематическая пара В образована зацеплением двух зубчатых колес 1 и 2 (рис. 1.9 а), заменим ее двумя низшими кинематическими парами В, С и звеном 2 длина r которого равна сумме радиусов зубчатых колес r1 и r2 (рис 1.9 б). Кулачковый механизм содержит высшую кинематическую пару В (рис. 1.9 в), ее заменяем низшими кинематическими парами В,С и звеном 2 длинной r, причем r=r1(рис.1.9 г)
|
В |
2 |
В |
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
А |
|
|
|
|
|
D |
|
А |
r1 |
С |
r |
|
|
r2 |
|
||
|
|
|
2 |
3 |
|
а |
|
б |
С |
|
|
|
||
|
С |
|
D |
|
|
|
2 |
|
3 |
|
В |
|
С |
|
|
|
1 |
|
r |
|
|
|
2 |
|
|
А |
r1 в |
г А |
|
|
|
|||
|
|
|
|
1 |
|
|
|
|
В |
Рис. 1.9 К замене высших кинематических пар низшими

12
Структурный анализ механизмов
Последовательность выполнения структурного анализа
1 Составляется кинематическая и структурная схема механизма. Кинематическая схема показывает принцип работы механизма, т.е. относительное перемещение звеньев, и строится в определенном масштабе с обозначением всех звеньев и кинематических пар. Структурная схема составляется для структурного анализа механизмов и отличается от кинематической схемы следующим:
а) высшие кинематические пары заменяются условным звеном, входящим в две низшие кинематические пары; б) поступательные пары заменяются вращательными, поскольку они
структурно эквивалентны (относятся к пятому классу); в) избыточные связи и лишние степени свободы убираются;
г) звенья, входящие в три кинематические пары, заменяются треугольником; в четыре кинематические пары четырехугольником и т.д.
2 Определяется число степеней подвижности.
3 Механизм разделяется на группы Ассура и механизмы первого класса. Отделение группы Ассура начинается с последнего звена (ведомого). После отделения группы Ассура число степеней свободы оставшейся части механизма измениться не должно.
Сначала пытаются отделить простейшую группу Ассура (2 звена 3 кинематические пары). Если число степеней механизма изменяется, то отделяют более сложную группу Ассура.
4 Определяется класс и порядок групп Ассура и класс всего механизма. 5 Записывается формула строения механизма.
ПРИМЕР: Необходимо произвести структурный анализ механизма. Из кинематической схемы (рис. 1.10) видно, что механизм состоит из пяти подвижных звеньев(1; 2; 3; 4; 5) шести низших (A; C; D; E; F; H) и одной высшей кинематической пары. При составлении структурной схемы (рис. 1.11 ) механизма необходимо заменить высшую кинематическую пару В на низшие, отбросить звено 2(ролик), т.к. оно дает лиш-
нюю степень свободы, звено 3 заменить треугольником, т.к. оно входит в три кинематические пары, поступательную пару Н заменить на вращательную.
|
|
|
|
|
|
F |
5 |
|
|
D |
|
|
|
|
|
|
С |
3 |
|
4 |
|
H |
|
2 |
В |
|
|
E |
|
|
|
|
|
|
|
|
1
А
Рис. 1.10 Кинематическая схема механизма
13
|
D |
F 5 |
H |
|
3 |
E 4 |
|||
|
|
|||
С |
|
|
2
А 
1  В
В
Рис. 1.11 Структурная схема механизма
По формуле Чебышева определяем число степеней свободы механизма
W = 3n − 2p2 − p1 = 3×5-2×7-0=1.
|
F 5 |
H |
Отделяем группу Ассура второ- |
|||||||||||||||
|
го класса, второго порядка |
|||||||||||||||||
|
4 |
|
|
|||||||||||||||
E |
|
|
(рис. 1.12), при этом число сте- |
|||||||||||||||
|
|
|
||||||||||||||||
|
|
|
пеней подвижности оставшейся |
|||||||||||||||
|
|
|
|
|||||||||||||||
Рис. 1.12 Группа Ассура 4-5 |
части механизма остается неиз- |
|||||||||||||||||
менным. Отделяем следующую |
||||||||||||||||||
|
|
|
|
группу Ассура, содержащую |
||||||||||||||
|
D |
3 |
|
звенья 2; 3, она также имеет вто- |
||||||||||||||
|
С |
|
рой класс и второй порядок |
|||||||||||||||
|
|
|
||||||||||||||||
|
|
|
(рис. 1.13). |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
После отделения групп Ассура |
||||||||||||||
|
2 |
|
|
остается механизм первого клас- |
||||||||||||||
|
|
|
са, состоящий из стойки-0 и ве- |
|||||||||||||||
|
|
В |
|
|||||||||||||||
|
|
|
дущего звена-1(рис. 1.14). Запи- |
|||||||||||||||
|
|
|
|
сываем формулу строения меха- |
||||||||||||||
Рис.1.13 Группа Ассура 2-3 |
низма |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
(0;1) |
|
|
|
|
2(2;3) |
|
|
|
|
|
2(4;5). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Формула читается следующим образом: механизм первого класса, содержа-
|
щий звенья один и два, присоеди- |
|
А |
няет к себе группу Ассура второ- |
|
1 |
го класса второго порядка, со- |
|
держащую звенья два, три и при- |
||
0 |
||
соединяет группу Ассура второго |
||
|
||
Рис.1.14 Механизм первого класса |
класса второго порядка, содер- |
|
|
жащую звенья четыре, пять. |
14
РАЗДЕЛ 2 КИНЕМАТИЧЕСКИЙ АНАЛИЗ И СИНТЕЗ МЕХАНИЗМОВ
Кинематический анализ механизма – изучение движения звеньев механизма без учета масс звеньев и сил, действующих на механизм.
Задача кинематического анализа состоит в определении перемещений звеньев, траекторий точек звеньев, а также в нахождении скоростей и ускорений точек в функции времени или в функции перемещения начальных звеньев.
Кинематический анализ может производиться следующими способами:
1Графическим (с помощью построения диаграмм перемещения, скоростей, ускорений).
2Графоаналитическим (построение планов скоростей, ускорений со
вспомогательными расчетами по формулам).
3Аналитическим (с помощью формул).
Определить положения звеньев механизма, их перемещения и траектории точек в зависимости от положения ведущего звена можно графическим способом (методом построения планов механизма).
Построение планов положений механизма
Рассмотрим графический метод построения планов положений механизма на примере кривошипно-ползунного механизма. Заданы длины звеньев
ℓОА,; ℓАВ, положение направляющей оси Х-Х (рис. 2.1). Примем, что ведущее звено ОА вращается с постоянной угловой скоростью. Строим кинематическую схему механизма в определенном масштабе:
l |
= |
lОА |
= |
l АВ |
, м/мм, |
(2.1) |
|
|
|||||
|
|
ОА АВ |
|
|
||
где ℓОА; ℓАВ – действительные длины звеньев; ОА, АВ – длины звеньев, отложенных на кинематической схеме в масштабе.
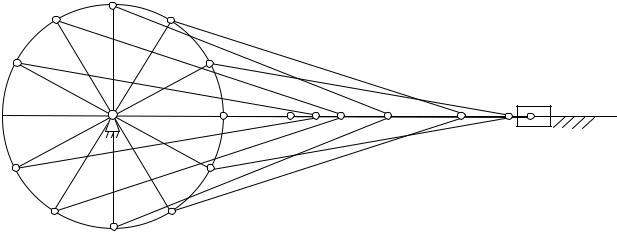
Из точки О проводим окружность радиуса ОА и отмечаем на ней положения точки А ведущего звена – АО, А1…А11. Положения звена АВ определяют методом засечек. Точка В движется по прямой Х-Х. Ее положения ВО, В1…В11, получим на пересечении оси Х-Х с дугой окружности В-В радиуса АВ, описанной из точек АО, А1…А11 соответственно. Соединив точки АО, А1, А2…А11 с центром О, а также с точками ВО, В1, В2… В11, получим планы механизма в 12 положениях (рис. 2.1).
А8
А7
А6 
А5
А4 |
15
А9 А10
|
А11 |
|
|
|
О |
B6 B7 B8 |
B9 |
B10 |
B11 B0 |
А0 |
|
|
|
|
|
В5 В4 |
В3 |
В2 |
В1 |
А1
А3 А2
Рис. 2.1 Планы положений механизма
Графический способ определения кинематических характеристик механизма методом кинематических диаграмм
Данный способ заключается в определении графиков (кинематических диаграмм) изменения перемещения, скорости, ускорения в функции времени t. Пусть необходимо построить кинематические диаграммы S = f (t);
V= f (t); а = f (t) точки В, кривошипно-ползунного механизма. Для этого:
1 Строим отрезок ℓ=ОО мм, изображающий время одного полного оборота кривошипа ОА в масштабе t.
|
|
= |
t |
|
, с/мм, |
(2.2) |
|
t |
l |
||||||
|
|
|
|
||||
|
|
|
|
|
|||
где t – время одного полного оборота кривошипа |
|
||||||
t = 60 |
, с, |
(2.3) |
|||||
|
|
n |
|||||
n – частота вращения кривошипа [об/мин].
Отрезок ℓ=ОО делим на 12 равных частей. На плане положений механизма определяем расстояния В0В1; В0В2; В0В3 и т.д., откладываем их в одноименных точках 1; 2; 3 и т.д. Масштабный коэффициент S для оси перемещения диаграммы S = f (t) принимаем равный двум масштабным коэффициентам плана положений механизма S = 2 l .
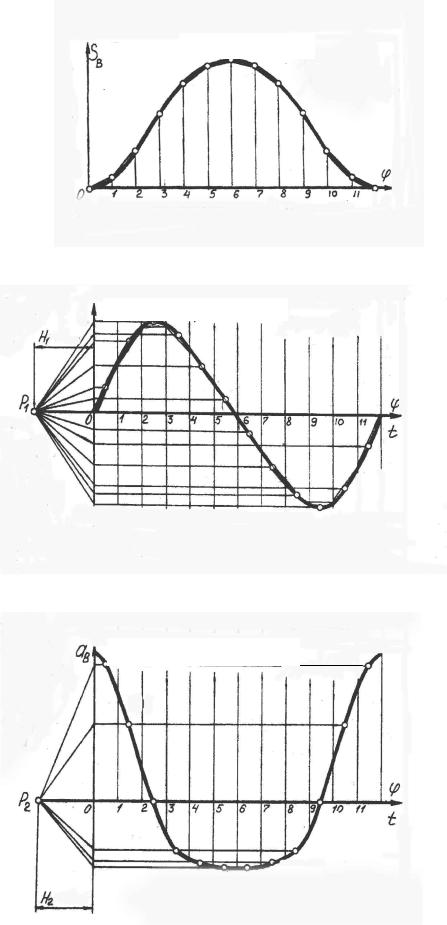
2Соединив последовательно плавной кривой полученные точки 0; 1/; 2/; 3/ и т.д., получим диаграмму перемещения точки В (рис. 2.2). Диаграмма скорости точки В (V = f (t)) получается графическим дифференцированием диаграммы S = f (t). Графическое дифференцирование выполняется методом хорд в следующей последовательности:
16
|
|
6' |
|
5' |
7' |
4' |
|
8' |
3' |
|
9' |
2' |
|
10' |
1' |
|
11' |
О
Рис. 2.2 Диаграмма перемещения точки В
Рис. 2.3 Диаграмма скорости точки В
Рис 2.4 Диаграмма ускорения точки В

17
а) под диаграммой S = f (t) строим параллельную систему координат V = f (t) и влево от точки О1 откладываем отрезок О1Р=Н1 [мм]. Из точки Р проводим лучи параллельно хордам 01/; 1/2/; 2/3/ до пересечения с осью 0S. От полученных точек проводим горизонтали до середины диапазонов, в которых проведены хорды. Соединив точки в серединах диапазонов плавной кривой, получим диаграмму V = f (t) (рис. 2.3).
Имея диаграмму скорости, аналогично строим диаграмму ускорения, а=f(t) (рис.2.4).
Масштаб µt для всех графиков остается неизменным. Масштабы по осям ординат определяются по следующим формулам:
для диаграммы скоростей
v |
= |
|
|
|
s |
|
, |
м / с |
; |
|
(2.4) |
|||
|
t |
Н1 |
|
|
|
|||||||||
мм |
||||||||||||||
|
|
|
|
|
|
|
|
|||||||
для диаграммы ускорения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
= |
|
|
|
v |
|
|
, |
|
м / с |
. |
(2.5) |
||
|
|
|
|
|
|
|
||||||||
|
|
|
Н |
|
|
|||||||||
|
|
|
t |
2 |
|
|
|
мм |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Из формул видно, что величины масштабов зависят от полосных расстояний Н1 и Н2.
Графоаналитический метод определения кинематических характеристик
Кинематическое исследование этим методом осуществляется в следующей последовательности:
1)производится структурный анализ заданного механизма;
2)вычерчивается механизм в положениях, для которых требуется построить планы скоростей и ускорений;
3)строятся планы скоростей и ускорений сначала для ведущих звень-
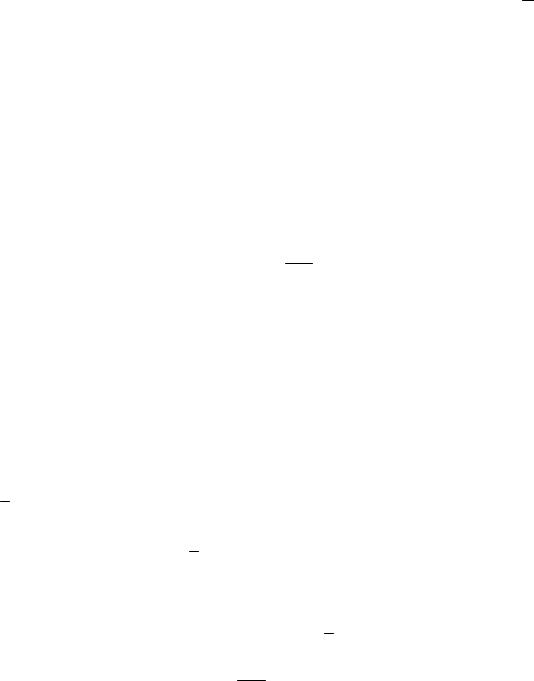
ев, а затем для всех групп Ассура; Произведем кинематический анализ кривошипно-ползунного механиз-
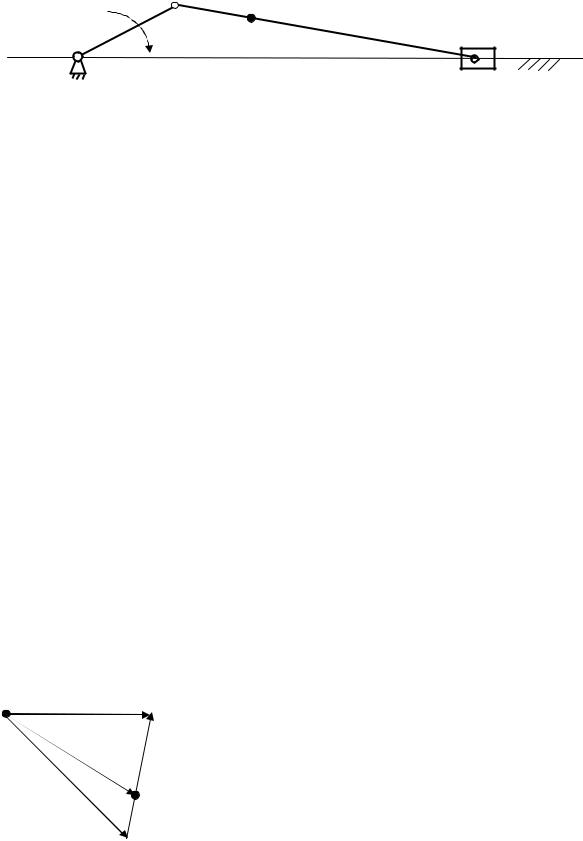
ма в заданном положении (рис. 2.5). Известно, что кривошип ОА вращается с постоянной угловой скоростью ω (рад/с), а также даны основные размеры
lОА; lАВ; l АS2 = 13 l АВ . Точка S2 является центром масс шатуна.
Произведя структурный анализ, установим, что механизм состоит из механизма первого класса, содержащего звенья 0; 1 и группы Асура II класса 2-го порядка, включающей звенья 2; 3. Число степеней подвижности механизма – единица (W=1).
|
|
|
18 |
|
|
А |
S2 |
|
ω |
|
|
|
|
2 |
|
О 1 |
|
|
|
|
|
В |
|
х |
|
|
х |
|
|
|
3 |
Рис. 2.5 Кинематическая схема кривошипно-ползунного механизма
Построение плана скоростей
Значение скорости точки А определяется по формуле:
VA = ω l OA м / c , |
(2.6) |
для построения плана скоростей необходимо выбрать масштабный коэффициент
µ |
|
= |
vA |
м/с |
, |
(2.7) |
|
v |
P |
мм |
|||||
|
|
|
|
||||
|
|
|
a |
|
|
|
где Ра – длина отрезка, изображающего скорость ϑА.
Для определения скорости точки В составим векторное уравнение. Точка В совершает сложное движение: она повторяет движение точки А и одновременно вокруг нее вращается.
ϑB = ϑA +ϑBA , |
(2.8) |
где ϑB - вектор скорости точки В; ϑA - вектор скорости точки А;
ϑBA - вектор скорости точки В в ее относительном движении вокруг
точки А.
Это векторное уравнение решается графически (рис. 2.6).
Р |
ϑr B |
b |
|
|
ϑr S 2 |
ϑ |
BA |
|
|
|
|
|
ϑ A |
S2 |
|
|
|
|
Отрезок РА, изображающий скорость ϑA , откладывается из полюса Р плана скоростей в направлении вращения кривошипа перпендикулярно ОА, из точки а проводится прямая, перпендикулярная шатуну АВ, а из точки Р проводится прямая, параллельная оси х-х. Обе прямые пересекаются в т. b. Отрезок Рb обо-
aзначает ϑB – вектор скорости точки В, а отре-
Рис. 2.6 План скоростей |
зок ва - ϑBA – вектор скорости точки В в ее от- |
|
носительном движении вокруг точки А. |
19
Скорость точки S2 центра масс шатуна АВ находится из подобия
|
|
аS |
2 |
= |
|
lAS |
2 |
|
, отсюда |
|
|
ав |
|
lAB |
|||||
|
|
|
|
|
|||||
|
|
|
|
= |
l AS |
|
|
ав , |
|
|
аS |
|
2 |
|
|||||
|
2 |
|
l AB |
||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||
где l AS |
, l AB - реальные размеры механизма. |
||||||||
2 |
|
|
|
|
|
|
|
|
|
Отрезок aS2 плана скоростей определяет положения точки S2 вектора ϑS2 на
отрезке ав. Соединив точку S2 с полюсом плана Р, получим отрезок РS2, изображающий в масштабе v скорость ϑS2 точки S.
Для определения величин скоростей необходимо длины отрезков плана скоростей умножить на масштабный коэффициент µv
VB = Pв v ; VBA = вa v ; |
VS2 = PS2 v |
Построение плана ускорений
Величина ускорения точки А определяется по формуле
2
аА = аnAO = VA , м/с2. (2.9)
l OA
Задаваясь длиной отрезка Па [мм], изображающего на плане ускорений век-
r
тор аА определяем коэффициент плана ускорений µа
а = |
а |
А |
, |
м/с |
2 |
. |
(2.10) |
|
|
|
|||||
Па |
мм |
|
|||||
|
|
|
|
|
|||
Ускорение точки В найдется из векторного уравнения
r |
r |
r |
τBA , |
|
а |
В = аА + аBAn |
+ а |
(2.11) |
r
где аВ - вектор ускорения точки В;
r
аА - вектор ускорения точки А;
аBAn ,аrBAr - векторы нормального и тангенциального ускорения точки В в ее относительном движении вокруг точки А.
Нормальное ускорение аBAn определяется:
аBAn = |
VBA2 |
, м/с2. |
(2.12) |
|
l AB |
||||
|
|
|
Величина отрезка an2, изображающего вектор аBAn ,
аn
аn2 = BA , мм. (2.13)
µа
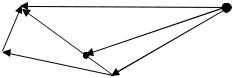
Векторное уравнение 2.11 решается графически (рис. 2.7).
Из полюса плана ускорений П откладываем вектор ускорения точки А (отрезок Па) параллельно звену ОА, направляя его от точки А к центру вращения О. Из точки а отрезка Па откладываем отрезок an2, параллельный шатуну АВ,
|
|
|
|
|
|
20 |
|
|
в направлении от В к А. Из точки n2 |
проводится |
прямая, перпендикуляр- |
||||||
|
b |
r |
|
ная отрезку an2, а из полюса плана |
||||
|
а В |
П |
ускорений |
П |
проводится прямая, |
|||
r |
|
|
|
|
||||
τBA |
|
|
параллельная оси х-х. |
|||||
а |
r |
|||||||
|
|
|
|
Прямые пересекутся в точке в. От- |
||||
n2 |
а |
А |
резок Пв обозначает аВ - вектор ус- |
|||||
|
|
|
n |
|
|
|||
|
|
а |
BA |
а |
|
корения точки В, а отрезок n2в, пер- |
||
|
|
|
|
|
|
|||
|
Рис. 2.7 План ускорений |
пендикулярный |
отрезку аn2, изо- |
|||||
|
r |
τBA - вектор тангенциаль- |
||||||
|
|
|
|
|
|
бражает а |
||
|
|
|
|
|
|
ного ускорения точки В в ее относи- |
||
тельном движении вокруг точки А. Соединив точки а и в, получим вектор аAВ .
Положение точки S2, центра масс шатуна АВ на отрезке ав находится из подобия
аS |
2 |
= |
l AS |
, отсюда аS |
|
= |
l AS |
ав . |
|
|
2 |
|
2 |
||||||
ав |
l AB |
2 |
l AB |
||||||
|
|
|
|
||||||
|
|
|
|
|
|||||
Соединив точку S2 с полюсом плана П, получим отрезок ПS2, изображающий вектор ускорения аS2.
Для определения величин ускорений точек механизма необходимо длины отрезков плана ускорений умножить на масштабный коэффициент а:
аВ = Пв а ; |
аS |
= ПS |
2 |
а ; и т.д. |
|
|
2 |
|
|
Аналитический способ определения кинематических характеристик методом векторных контуров
Аналоги скоростей и ускорений
При кинематическом анализе механизмов скорости и ускорения звеньев часто удобно выражать не в функции времени, а в зависимости от перемещения (S1) или угла поворота(φ1) ведущего звена механизма.
Пусть угол поворота (φk) звена k задан в виде функции угла поворота входного звена φk=f(φ1), тогда угловая скорость звена равняется
ωk= |
dϕ |
|
dϕ |
|
dϕ |
|
|
dϕ |
|
dϕ |
|
|
, |
|
(2.14) |
|
k |
= |
k |
|
1 |
ωk |
= |
k |
|
1 |
= ωϕω1 = ω1ϕk′ |
|
|||||
dt |
dt |
dϕ |
dϕ |
dt |
|
|||||||||||
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
где ω1- угловая скорость начального звена [c |
-1 |
], ωφ = ϕk′ = |
|
dϕ |
есть без- |
|||||||||||
|
|
k |
||||||||||||||
|
|
dϕ |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
размерная угловая скорость звена k. Безразмерная угловая скорость называется аналогом угловой скорости звена k.
Таким образом, действительная угловая скорость ωk равна произведению угловой скорости ω1 начального звена на аналог угловой скорости ϕk′ звена k.
Дифференцируя уравнение (2.14) по времени t, получим величину углового ускорения εk звена k.
εk=ω12φ"k+ε1φ'k, |
(2.15) |
где φ2”k- аналог углового ускорения звена k.