

3994
.pdf21
динат, а постоянные времени сглаживающих фильтров выбирая заведомо больши-
ми. В этом случае управляемая функция F изменяется во времени медленнее, чем от изменения рабочих управляемых координат.
В лабораторной работе рассматривается одномерная система экстремального регулирования, работающая по способу запоминания экстремума.
Система действует следующим образом. На вход объекта подается пробное воздействие и оценивается значение управляемой функции F. Определяются те воз-
действия, которые приближают F к экстремуму. Затем прикладываются рабочие воздействия к объекту и т. д. После прохождения точки экстремума F происходит реверс на входе объекта и начинаются колебания системы вокруг этой точки. В не-
прерывных экстремальных системах поисковые и рабочие воздействия производят-
ся одновременно.
Выходная величина объекта F подается на запоминающее устройство ЗУ экс-
тремального регулятора. Пусть имеем экстремуммаксимум и запоминание проис-
ходит только при увеличении F. На уменьшение F запоминающее устройство не реагирует. Сигнал с ЗУ непрерывно подается на элемент сравнения и затем сигнал разности (F-Рэ) поступает на сигнум-реле СР и далее на исполнительный механизм ИМ. При срабатывании реле запомненное значение F сбрасывается, и запоминание
F начинается снова.
Например, если F является электрической величиной, то схема запоминающе-
го устройства может быть такой:
22
Напряжение U1, пропорциональное выходу объекта, подается на запоминаю-
щий конденсатор С через диод D. Диод шунтирован контактом сигнум-реле, кото-
рый замыкается при срабатывании. При увеличении U1 диод пропускает входное напряжение, заряжая конденсатор до напряжения U1.
Когда экстремум-максимум достигнут и напряжение U1 начинает уменьшать-
ся, то диод запирается, появляется напряжение U2 на выходе схемы, которое про-
порционально разности dF = (F- Fэ). Когда dF превысит зону нечувствительности сигнум-реле, происходит его срабатывание и реверс исполнительного механизма.
При этом контакты К реле замыкаются и происходит сброс запомненного значения
F. Конденсатор снова заряжается до текущего значения F, и цикл работы повторяет-
ся.
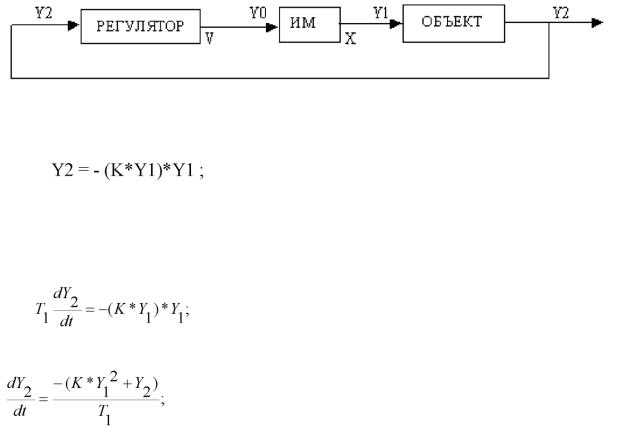
Обобщенная структурная схема исследуемой системы представлена на рисун-
ке:
Статическая характеристика объекта имеет экстремум-максимум и описывает-
ся следующей зависимостью:
где К- коэффициент передачи объекта.
В динамике уравнение объекта можно представить звеном первого порядка:
где Т1постоянная времени объекта, или:
23
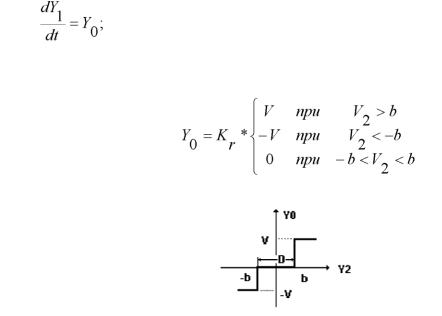
Уравнение исполнительного механизма с постоянной скоростью будет:
Уравнение релейного регулятора возьмем в виде:
Содержание работы.
1.Определить потери на поиск в переходном процессе экстремальной сис-
темы с параметрами:
К=1; Т1=1с; V=1; зона нечувствительности D = 0.5 при изменении коэффици-
ента усиления регулятора Кг.
Найти среднее значение потерь на поиск.
1.Выполнить пункт 1 для этой же системы при изменении зоны нечувст-
вительности регулятора D.
2.Выводы отразить в отчете по работе.
Вопросы для самоподготовки:
1.Что называют потерями на поиск? Как они рассчитываются?
Покажите на графике время переходного процесса в экстремальной системе.
2.Что называют квацистационарным режимом работы экстремальной сис-
темы? Этот режим создается реально в системе при проектировании или это мате-
матический формализм, удобный для анализа системы.
3.Представьте математическую модель системы в форме Коши.
24
Лабораторная работа № 3
Методы организации движения к точки экстремума в
самонастраивающихся системах
Цель работы: количественная оценка быстродействия и точности установле-
ния экстремума в конкретной экстремальной системе при использовании различных способов движения к состоянию экстремума. Наиболее точным принять метод Гаус-
са-Зайделя .
В поисковых самонастраивающих системах, к которым относятся и системы экстремального управления, оптимизация критерия качества осуществляется с по-
мощью специальных поисковых сигналов. Они позволяют определить направление изменение контролируемых параметров системы, соответствующее приближению к положению экстремума показателя качества. Поэтому обязательной составной ча-
стью этих систем является устройство организации движения к положению экстре-
мума. Сложность его определяется принятым алгоритмом поиска экстремума.
Методы поиска экстремума функций многих переменных часто используются в теории управления. Рассмотрим основные сведения по наиболее часто используе-
мым алгоритмам:
методу Гаусса-Зайделя,
методу градиента,
методу наискорейшего пуска.
Фактически все три процедуры относятся к градиентным методам и включают
всебя два этапа:
определение составляющих градиента,
организация движения к состоянию экстремума.
Мы рассмотрим здесь второй этап – движение к экстремуму, считая, что со-
ставляющие градиента уже определены каким-либо способом.
1.Метод Гаусса-Зайделя.
Процедура поиска экстремума здесь наиболее простая: начиная с начального значения управляемой функции F0(X1,X2,...Xn), изменяют одну координату X1, ос-
тавляя другие неизменными, до тех пор, пока градиент функции F по координате X1
25
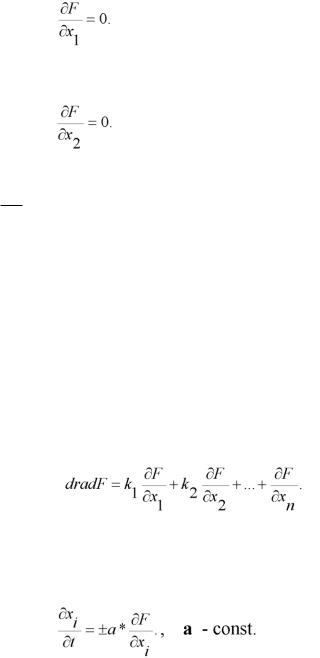
не обратится в ноль:
Затем эту же процедуру повторяют, изменяя координату X2 и т.д.
Дойдя до конца цикла, снова начинают изменять координату X1 и измерять
F , которая к этому времени стала отличной от нуля.
x1
Несколько циклов такой процедуры приведут к положению, когда градиент функции grad F с наперед заданной погрешностью будет близок к нулю.
Недостаток метода по сравнению с другими - малое быстродействие в дости-
жении экстремума, преимущество - высокая точность определения положения экс-
тремума.
2.Метод градиента.
В начальном положении F0 определяют градиент функции F:
Затем устанавливают скорость изменения каждой координаты системы по правилу:
то есть пропорционально своей составляющей градиента.
Здесь значение “+а” соответствует экстремуму-максимуму, а “-а” соответст-
вует экстремуму-минимуму.
Недостатком метода является тот факт, что его сходимость, т.е. точность уста-
новления экстремума существует только для глобального экстремума. Это значит,
что, если функция F имеет много локальных экстремумов наряду с глобальным, то для выхода в область глобального экстремума необходимо применить другие мето-
ды либо многократно использовать метод градиента при разных начальных услови-
ях.
26
3.Метод наискорейшего спуска.
В начальном положении F0 определяется градиент функции F, так же как при методе градиента. А затем все координаты системы изменяются пропорционально своим составляющим градиента в начальной точке. Это движение продолжается,
пока градиент регулируемой функции F по направлению движения системы m, то-
есть по направлению вектора градиента в начальной точке,не обратится в ноль:
В этом положении снова определяется направление вектора градиента и про-
исходит движение системы в новом направлении.
Таким образом, в отличие от предыдущего метода, здесь направление гради-
ента определяется только в начале каждого цикла движения. Погрешность достиже-
ния экстремума в этом методе наибольшая из трех, но этот недостаток сглаживается большим быстродействием.
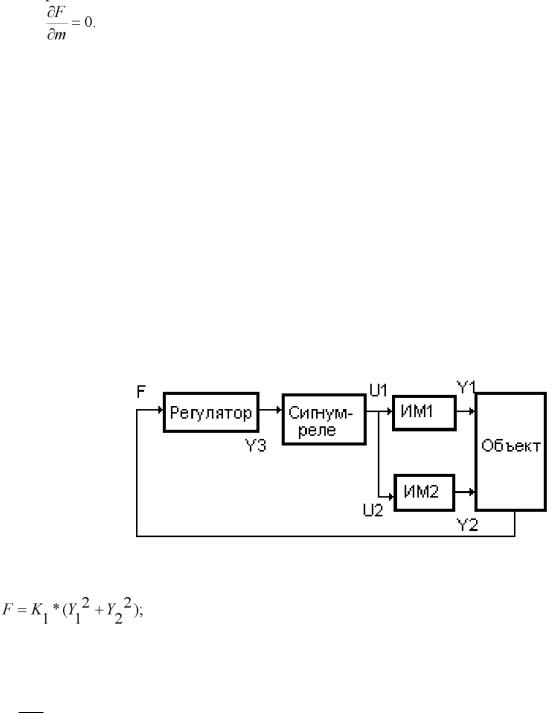
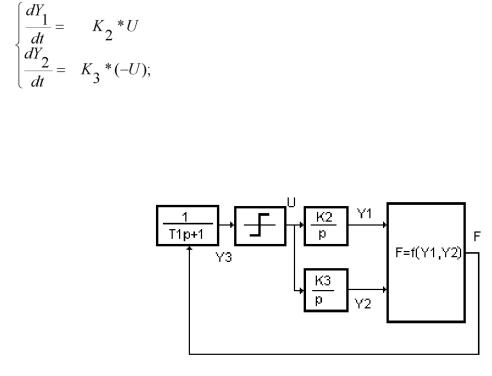
Исследуемая система экстремального регулирования обслуживает объект управления с нелинейной квадратичной статической характеристикой. Регулируе-
мая функция зависит от двух регулирующих воздействий Y1 иУ2: Уравнения сис-
темы запишем в виде:
объект:
К1 – коэффициент передачи объекта,
регулятор:
T1 dY3 Y3 F ; dt
Т1 – постоянная времени регулятора,
27
исполнительный механизм:
K2 и K3 – коэффициенты передачи.
Таким |
образом |
структурная |
схема |
системы |
имеет |
вид: |
Содержание работы.
1.Определить параметры переходного процесса в экстремальной системе при использовании всех трех способов движения к положению экстремума. Параметры системы для определенности рекомендуется выбрать такими:
K1 = 1; T1 = 1.0c; K2 = 1; K3 = 1. Зона нечувствительности =0.5. 2.Определить время достижения экстремума и точность достижения экстре-
мума во всех трех случаях, считая наиболее точным значением экстремума значе-
ние, определенное методом Гаусса-Зайделя.
28
Вопросы для самоподготовки:
1.Почему метод Гаусса-Зайделя называют слепым методом поиска?
2.Какой из методов поиска обеспечивает устойчивость нахождения экс-
тремума?
3.Как, по вашему, должно работать устройство поиска, обеспечивающее метод Гаусса-Зайделя?
4.А теперь постройте алгоритм работы устройства, обеспечивающего ме-
тод наискорейшего спуска. Что надо добавить, по сравнению с методом Гаусса-
Зайделя?
Лабораторная работа № 4
Самонастраивающаяся система регулирования с эталонной моделью
Цель работы: исследование качества адаптации самонастраивающейся сис-
темы (СНС) с эталонной моделью.
Необходимость применения адаптивных принципов управления возникает в тех случаях, когда диапазон изменения свойств объекта и внешних возмущений так велик, что показатели качества выходят за пределы заданных ограничений. А между тем любая неадаптивная система, работающая по принципу обратной связи, в силу этого принципа способна нейтрализовать изменения параметров объекта и среды в довольно больших пределах. И эти способности можно расширить, не прибегая к принципу адаптации.
Расширение функциональных возможностей неадаптивных систем управления с обратной связью, приближающее их по свойствам к адаптивным системам, воз-
можно:
с помощью увеличения коэффициентов усиления систем до бесконечности без нарушения устойчивости,
с помощью введения автоколебательных скользящих режимов в релейных системах,
с помощью систем с переменной структурой регулятора.
Такие системы управления называют иногда системами с пассивной адапта-
29
цией.
Самонастраивающиеся системы с эталонной моделью также являются систе-
мами с подобного рода адаптацией, использующей скользящий режим работы ре-
лейного регулятора.
Самонастраивающиеся системы с эталонной моделью фактически представ-
ляют собой безпоисковые СНС с замкнутым контуром самонастройки, но, в отличие от СНС с настраиваемой моделью, здесь сигнал самонастройки не изменяет пара-
метры настройки регулятора, как требует принцип адаптации, а формируется опре-
деленным образом и подается на вход объекта.
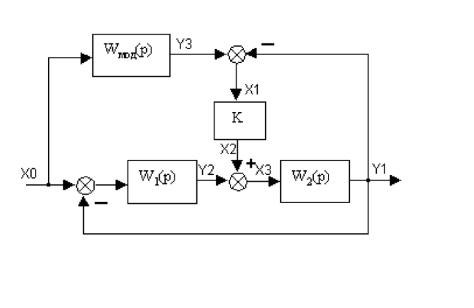
Структурная схема такой системы может быть представлена в следующем ви-
де:
Модель Wмод(p) является физическим устройством, реализованным в анало-
говом или цифровом виде, и на вход ее подаются те же воздействия, что и на объект управления. Выходы объекта и модели вычитаются и разность их (ошибка контура настройки) подается на вход объекта через усилитель с большим коэффициентом усиления K.
Хотя сигнал разбаланса контура самонастройки в этой системе не воздейству-
ет непосредственно на параметры настройки регулятора W1(p), а подается на вход объекта, можно показать, что оба эти варианта являются равносильными.
В теории СНС различают два вида моделей – настраиваемые и эталонные. При
30
настраиваемых моделях их параметры меняются в процессе идентификации до тех пор, пока сигналы с выходов объекта и модели не сравняются. Если же задается эта-
лонная модель процесса, то разность сигналов с выходов объекта и модели служит для изменения параметров регулятора, при которых качество процесса наконец ста-
нет соответствовать желаемому, заданному эталонной моделью.
Найдем передаточную функцию замкнутой системы. Уравнения звеньев, со-
гласно схемы системы, имеют вид:
Y2 = W1(p) * (X0-Y1);
Y3 = Wмод(p)* X0;
X1 = Y3-Y1;
X2 = K * X1;
X3 = Y2 + X2;
Y1 = W2(p) * X3;
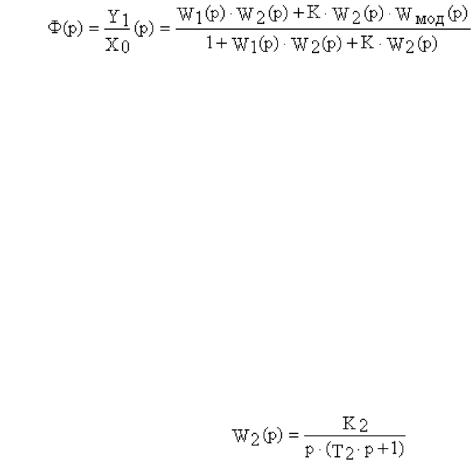
Исключая промежуточные переменные, находим передаточную функцию сис-
темы:
Eсли считать, что K=K3 достаточно велико, а лучше всего K3 стремится к бес-
конечности, тогда:
Y1 ~= Wмод(p) * X0, (2)
то есть качество переходного процесса не зависит от медленноменяющихся параметров объекта, а определяется заданной эталонной моделью Wмод(p).
Качество настройки в такой системе будет зависеть от того, насколько боль-
шим можно взять коэффициент усиления K3, чтобы не вызвать неустойчивости сис-
темы. Поэтому желательно выбрать Wмод(p) так, чтобы условия устойчивости при бесконечно большом коэффициенте K3 выполнялись.
В лабораторной работе исследуется система с эталонной моделью следующего вида: передаточная функция объекта задана: