

3731
.pdfСиловой анализ группы Ассура 2-3
Произведем силовой анализ группы Ассура, состоящей из звеньев 2 и 3. Отделенная группа Ассура должна находиться в равновесии, поэтому в той точке, где присоединялся кривошип, прикладывается реакция со стороны кривошипа на шатун
|
|
|
|
τ |
|
|
|
n |
(рис. 3.5). Состав- |
|
|
|
|
|
|
||||||
|
R12 = R12 |
+ R12 |
||||||||
ляющая |
|
|
|
|
n |
направлена парал- |
||||
|
|
|
|
|||||||
|
|
R12 |
||||||||
τ
лельно оси шатуна, а R12 - перпендикулярно ему. Со стороны стойки на поршень действует реакция R03 , направленная перпендикулярно оси цилиндра.
Рис. 3.5 План группы Ассура 2-3 Равновесие группы выра- жается векторной суммой
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ R03 + Pми2 + Pми2 = 0. (3.11) |
||||||||||||||||
|
Pc + Pи2 + Pи3 + G2 + G3 + R12 |
+ R12 |
||||||||||||||||||||||
Величина и направление касательной составляющей |
|
τ |
определяются из |
|||||||||||||||||||||
|
||||||||||||||||||||||||
R12 |
||||||||||||||||||||||||
условия равновесия группы Ассура в форме сумм моментов сил относительно точки В:
∑M B (P)= M B (Pи2 )+ M B (G2 )+ MB (Rτ12 )+ M B (Pми2 )= 0,
∑MB (P)= −Pи2 hp + G2 hG − R12τ (lAB / l )+ Pми2 (lAB / l )= 0.
Из уравнения (3.13)
Rτ |
= |
l |
(− P |
h + G |
|
h + P |
(l |
|
/ |
)). |
|
|
|
|
|||||||||
12 |
|
lAB |
и2 |
1 |
2 |
2 |
ми2 |
|
AB |
l |
|
Величины и направления
(3.12)
(3.13)
n
R12 и
|
R |
03 определяются при помощи плана |
|||
сил, |
построенного в |
масштабе |
|||
|
P , |
Н |
по векторному |
уравнению. |
|
|
|
||||
|
мм |
|
|
При построении плана сначала от- |
|
|
кладываются векторы известных по |
|
Рис. 3.6 План сил группы |
модулю и направлению сил, а затем |
|
известных лишь по линии действия |
||
Ассура 2-3 |
||
(рис. 3.6). |
||
|
Начало откладываемого вектора должно совпадать с концом ранее отло-
n
женного вектора. Проведенные последними, линии действия векторов R12 и R03 пересекутся; при этом векторы взаимно ограничатся по длине.
|
|
τ |
|
|
n |
|
|
|
Соединив начало вектора |
|
с концом |
|
, получим вектор R12 . |
||||
R12 |
R12 |
|||||||
Действительные величины реакций, определенных с помощью силового
многоугольника, с учетом масштабного коэффициента P , Н .
мм
Силовой анализ ведущего звена (кривошипа)
Величина и направление уравновешивающего момента MУ определяются из условия равновесия ведущего звена в форме суммы моментов относительно опоры (рис. 3.7):
|
|
|
|
|
|
∑MO (P)= MO ( |
|
21 )+ MУ = 0, |
(3.14) |
|
|
|
|
R |
|||||
где |
|
21 |
- реакция со стороны шатуна 2 на кривошип 1. |
|
|||||
R |
|
||||||||
|
|
|
|
|
|
|
|||
|
R21 |
= −R12 ; |
|
||||||
|
|
|
|
|
|
∑ M O (P)= −M + R21 h21 = 0. |
(3.15) |
||
|
|
|
|
|
|
|
|
У |
|
Величина уравновешивающего момента найдется из уравнения
MУ = R21h1, Н м.
Рис. 3.7 План сил ведущего звена |
Уравновешивающая сила |
|
|
|
|
|
P |
= |
MУ |
, H. |
(3.16) |
|
|
|||||||||
|
|
|
|
У |
|
lOA |
|
|
|
|
|
|
|
|
|
|
|
||
Реакция со стороны стойки на кривошип |
R |
01 определяется из уравнения |
|||||||
(3.7) в масштабе |
|
|
|
|
|
||||
|
|
|
|
|
= 0. |
|
(3.17) |
||
|
R21 + R01 |
|
|||||||

РАЗДЕЛ 4 КОЛЕБАНИЯ В МЕХАНИЗМАХ
Вибрация
Создание высокопроизводительных машин и скоростных транспортных средств, форсированных по мощностям, нагрузкам и другим рабочим характеристикам, приводит к увеличению интенсивности и расширению спектра вибрационных полей. Вредная вибрация нарушает планируемые конструктором законы движения машин, механизмов и систем управления, порождает неустойчивость рабочих процессов и может вызвать отказ и полную разрушение всей системы. Из-за вибрации увеличиваются динамические нагрузки в элементах конструкции (кинематических парах, стыках и др.), в результате снижается несущая способность деталей, развиваются трещины, возникают усталостные разрушения. Действие вибрации может изменить внутреннюю и поверхностную структуру материалов, условия трения и износа на контактных поверхностях деталей машин и привести к нагреву конструкций.
Вибрация порождает шум, являющийся важным экологическим показателем среды обитания человека. Вибрация оказывает и непосредственное влияние на человека, снижая его функциональные возможности и работоспособность. Однако вибрация не всегда является вредной. В настоящее время имеется много машин, в которых для выполнения того или иного технологического процесса намеренно возбуждаются колебания. Машины, в которых технологический процесс выполняется на основе возбужденных колебаний, называют вибрационными машинами. Такие машины получили большое распространение в различных отраслях промышленности и в сельском хозяйстве. С помощью вибрации дробят, измельчают, транспортируют кусковой и сыпучий материал, разделяют смеси, уплотняют бетон.
Наиболее распространенным возбудителем колебаний является дебалансный возбудитель (рис. 4.1). Неуравновешенная масса m вращается около оси О с угловой скоростью ω и развивает центробежную силу инерции Fи, равную
Fи=mω2ρ, (4.1) где ρ - расстояние центра масс m от оси О. Сила инерции дебаланса через
опору О передается массе М, с которой связан рабочий орган вибромашины.
Fи
m
ω
О |
ρ |
|
М |
Рис. 4.1 Схема дебалансного вибратора
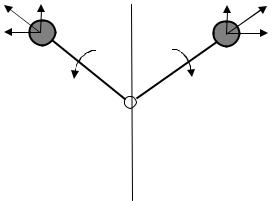
Существует дебалансный вибратор направленного действия (рис.4.2), в котором два дебаланса m вращаются с одинаковой скоростью в противоположных направлениях. Горизонтальные составляющие Fиx двух центробежных сил инерции Fи взаимно уравновешиваются, а вертикальные Fиу - складываются, образуя суммарную силу инерции
Fи=2Fиу=2 mω2ρcosα, |
(4.2) |
где α – угол, образуемый силой Fи с вертикальной осью.
Fи |
Fиу |
|
Fиу |
Fи |
|
|
m |
|
m |
|
|
Fиx |
ω |
|
ω |
Fиx |
|
|
ρ |
О |
|
ρ |
|
|
|
|
М |
|
|
Рис. 4.2 Схема дебалансового вибратора направленного действия
Общее для всех вибромашин следующее:
1 Вибрационная машина является колебательной системой, состоящей из возбудителя колебаний – вибратора и колеблющейся массы, т.е. рабочего органа и частей, жестко с ним скрепленных;
2 Рабочий процесс в вибромашинах получается в результате суммарного эффекта большого количества отдельных циклов, идущих один за другим.
При динамическом исследовании вибромашин необходимо составить и решить уравнения движения. В эти уравнения входят такие параметры:
-возбуждающая сила вибратора;
-восстанавливающие силы;
-силы взаимодействия вибрирующего органа со средой;
-инерционные силы.
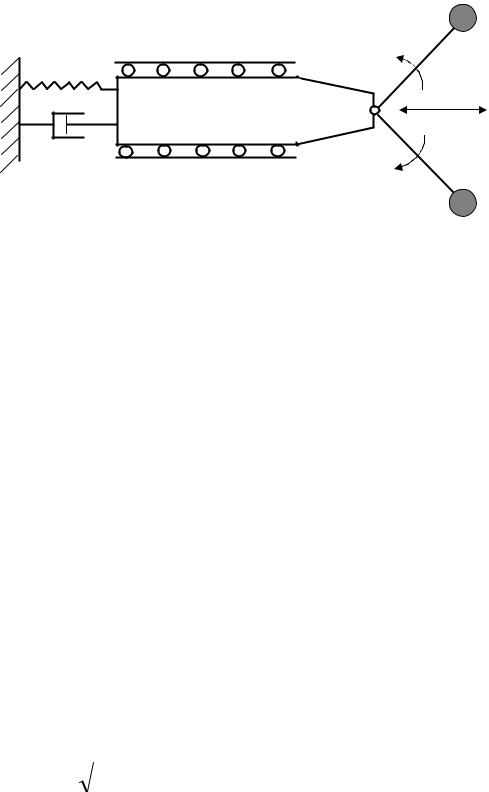
Рассмотрим динамическую модель вибрационной машины (рис.4.3). Дебалансный возбудитель направленного действия создает возбуждающую колебания силу Fи периодического действия, которая передается массе М, с массой М жестко связан рабочий орган – например дека, для вибротранспортирования материалов.
Пружина с жесткостью с и демпфер с коэффициентом затухания b моделируют систему упругой подвески к неподвижному корпусу машины.
|
|
m |
|
ω |
|
с |
|
|
М |
|
Fи |
|
|
|
b |
|
|
|
ω |
m |
|
|
Рис. 4.3 Динамическая модель вибрационной машины с дисбалансным вибратором направленного действия
В линейной колебательной системе возбуждающая сила меняется по гармоническому закону
Fи=2mω2ρcоsωt, |
(4.3) |
где А=2mω2ρ амплитудное значение возбуждающей силы. |
|
Обозначим через х линейную координату перемещения массы М, тогда уп- |
|
ругая сила пружины будет |
|
Fупр= -сx, |
(4.4) |
где с - жесткость пружины.
Демпфирующие свойства системы представим тоже в виде линейной функции скорости –bx. Проектируя все силы, приложенные к массе М, на ось х, получим уравнение колебаний массы М
Мx"+bx'+cx= Аcоsωt. |
(4.5) |
Разделим обе части уравнения на М, получим |
|
x"+2nx'+k2 x= αcоsωt, |
(4.6) |
где b/М=2n, c/ М= k2, А/ М=α.
Полное решение этого дифференциального уравнения представляет собой закон движения массы М, в которую входят свободные и вынужденные колебания. Свободные колебания в системе затухают быстро, тогда решение вынужденных колебаний массы М имеет вид
x = |
|
α |
|
|
cos( ωt − δ ) = H cos( ωt − δ ), (4.7) |
||||
|
|
|
|
|
|||||
(k 2 −ω 2 )2 + 4n2ω 2 |
|
||||||||
|
|
|
|
|
|
|
|
||
|
|
где δ = аrctg |
|
2nω |
|
; |
(4.8) |
||
|
|
k |
2 |
2 |
|||||
|
|
|
|
|
− ω |
|
|
|
|

Н = α ; (4.9)

 (k2 −ω2)2 +4n2ω2
(k2 −ω2)2 +4n2ω2
Н- амплитуда колебаний массы.
Основные методы виброзащиты Уменьшение интенсивности колебаний объекта может быть достигнуто не-
сколькими способами.
1 Изменение конструкции объекта.
Устранение резонансных явлений за счет изменения собственных частот объекта.
2 Виброизоляция.
Препятствует связи между источником колебаний и объектом, вибрацию которого необходимо снизить.
3 Динамическое гашение колебаний.
Осуществляется за счет ввода в конструкцию дополнительных устройств
– виброгасителей.
4 Снижение виброактивности источника.
Причина возникновения колебаний может быть связана с трением в кинематических парах. Снижения виброактивнасти в этом случае можно добиться путем применения смазки. Если причиной возникновения колебаний являются движущиеся тела (ротор, перемещающиеся звенья механизма), то снизить интенсивность колебаний можно с помощью уравновешивания движущихся масс.
Уравновешивание вращающихся тел
Задача об уравновешивании вращающихся тел заключается в таком подборе их масс, который обеспечил бы полное или частичное погашение добавочных инерционных давлений на опоры. Вращающееся тело состоит из бесконечно большого числа элементарных масс mi, удаленных на расстояние ri j от оси вращения и на расстояние ai от плоскости, проходящей через центр S масс тела; тогда результирующая сила инерции Ри и результирующий момент Ми всех сил инерции тела относительно плоскости, проходящей через центр S масс:
|
|
|
и = ω 2 ∑mi |
|
|
|
= ω2mrs ; |
(4.10) |
||||
Р |
||||||||||||
|
ri |
|||||||||||
|
|
и= ω 2 ∑mi |
|
ai = ω 2 |
|
ra , |
(4.11) |
|||||
М |
J |
|||||||||||
|
|
ri |
||||||||||
где m- масса всего тела, rs- расстояние центра S масс тела от оси вращения; Jra
- центробежный момент инерции относительно оси вращения и плоскости, перпендикулярной к оси вращения и проходящей через центр масс S тела. При вращении тела угол между векторами Р и и М и сохраняет все время
одно и то же значение α. Тело считается полностью уравновешенным, если ре-
зультирующая сила инерции равна нулю и, следовательно, вращающееся тело не оказывает никаких динамических давлений на опоры.
В этом случае имеем
|
|
|
|
|
= ω 2 ∑mi |
|
|
= 0; |
(4.12) |
||
mrs |
ri |
||||||||||
|
|
|
= ω 2 ∑mi |
|
ai = 0. |
(4.13) |
|||||
Jra |
|||||||||||
ri |
|||||||||||
Условия (4.12) и (4.13) будут удовлетворены только тогда, когда центр масс тела будет лежать на оси вращения, являющейся одной из главных осей инерции. Тело считается уравновешенным статически, если выполняется только условие (4.12), и уравновешенным динамически, если выполняется только условие
(4.13). |
|
Динамическая неуравновешенность, или динамический дисбаланс |
Д |
вращающегося тела измеряется величиной |
|
Д = ∑Gi ri ai [Hм2]. |
(4.14) |
Статическая неуравновешенность, или статический дисбаланс С , харак-
теризующий оставшуюся неуравновешенность, измеряется статическим моментом
С = GrS [Hм], |
(4.15) |
где G- вес вращающегося тела, Н.
Неуравновешенное тело на практике чаще всего уравновешивают при помощи добавочных масс (противовесами). Вращающиеся тела, у которых общая длина значительно меньше их диаметра (шкивы, маховики, зубчатые колеса), имеют незначительные центробежные моменты инерции Jra, поэтому такие тела достаточно уравновесить только статически.
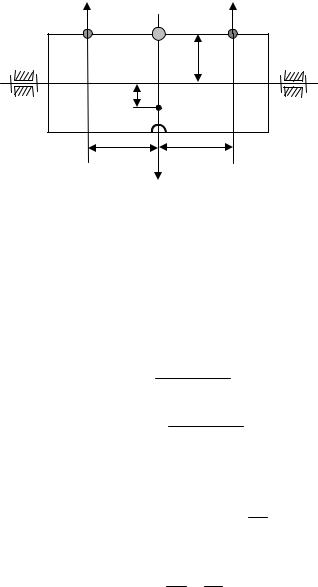
Пусть тело вращения массой m статически не уравновешено (рис. 4.4). Центр масс S данного тела расположен на расстоянии от оси вращения rs. При уравновешивании противовес массой mпр помещают на линии N-N, проходящей через центр тяжести S перпендикулярно оси вращения, и закрепляют грузик с противоположной стороны.
Массу противовеса находим из уравнения |
|
|||
mпр |
= m |
rs |
. |
(4.16) |
|
||||
|
|
r |
|
|
|
|
пр |
|
|
Вместо установки противовеса можно удалить часть массы с противоположной стороны. Величина удаляемой массы должна быть равна массе противовеса.
Если конструктивно установить противовес на линии N-N не удается, можно заменить его на два противовеса массами m1 и m2, расположенных на расстояниях a1 и а2 от линии N-N.
Р1 |
N |
Р2 |
|
||
m1 |
|
mпр m2 |
|
|
rпр |
|
rs |
|
а1 N а2 Ри
Рис. 4.4 Схема уравновешивания вращающегося тела
Массы m1 и m2 определяются из уравнений
mrs=m1rпр+m2 rпр;
m1rпрa1- m2 rпрa2=0,
откуда
m1 = m (rs a2 ) ; rпр a1 + a2
m2 = m rпр (a1 + a2 ) .
Сложив массы этих противовесов, получим
m1 + m2 = m rs = mпр ,
rпр
а из отношения найдем
m1 = a2 . m2 a1
(4.17)
(4.18)
(4.19)
(4.20)
(4.21)
(4.22)
Из приведенных формул следует, что один противовес массой mпр может быть заменен двумя противовесами с массами m1 и m2, расположенными на линии, параллельной оси вращения тела, и подобранными так, чтобы их суммарная масса равнялась массе mпр, а их общий центр масс S совпадал с положением противовеса mпр.
|
ОГЛАВЛЕНИЕ |
|
Раздел 1 Основные понятия ТММ. Структурный анализ и синтез |
|
|
механизмов |
|
3 |
Раздел 2 |
Кинематический анализ и синтез механизмов |
19 |
Раздел 3 |
Кинетостатический анализ механизмов |
26 |
Раздел 4 |
Колебания в механизмах |
32 |
Библиографический список
1.Артоболевский, И.И. Теория механизмов и машин [Текст]: учеб. для втузов // И.И. Артоболевский.- 4-е изд., перераб. и доп. – М.:Наука. 1988. - 640 с.
2.Гончаров, П.Э. Теория механизмов и машин [Текст]: учеб. пособие / П.Э. Гончаров, П.И. Попиков, С.А. Колосов.-Воронеж, 2000. - 139 с.
3.Курсовое проектирование по теории механизмов и машин [Текст] / А.С. Кореняко, Л.И. Кременштейн, С.Д. Петровский, Г.М. Овсиенко, В.Е. Баханов, П.М. Емец.-Киев: Вища школа,1970. - 332 с.
4.Теория механизмов и механика машин [Текст]: учеб. для втузов / К.В. Фролов, С.А. Попов, А.К. Мусатов, Д.М. Лукичев, В.А. Никоноров, Г.А. Тимофеев, А.В. Пуш. -3-е изд., стер.- М.: Высш. шк., 2001. - 496 с.