

3523
.pdf21 |
|
Коэффициент учета вращающихся масс определяется для каждой |
|
передачи по формуле |
|
δ вр =1,04 + 0,05 uк2 , |
(2.18) |
где Uк– передаточное число коробки передач. |
|
Подсчет ускорений удобно вести табличным методом, используя данные динамического паспорта автомобиля.
|
|
|
|
|
|
|
|
|
|
Таблица 2.4 |
||
|
|
|
Данные для расчета ускорений автомобиля |
|||||||||
y |
V1 |
V2 |
V 3 |
V4 |
D1 |
D2 |
D3 |
D3 |
J1 |
J2 |
J3 |
J4 |
ymin |
Vmin |
|
|
|
|
|
|
|
|
|
|
|
y2 |
|
|
|
|
|
|
|
|
|
|
|
|
y3 |
|
|
|
|
|
|
|
|
|
|
|
|
….. |
|
|
|
|
|
|
|
|
|
|
|
|
yV |
|
|
|
Vmax |
|
|
|
|
|
|
|
|
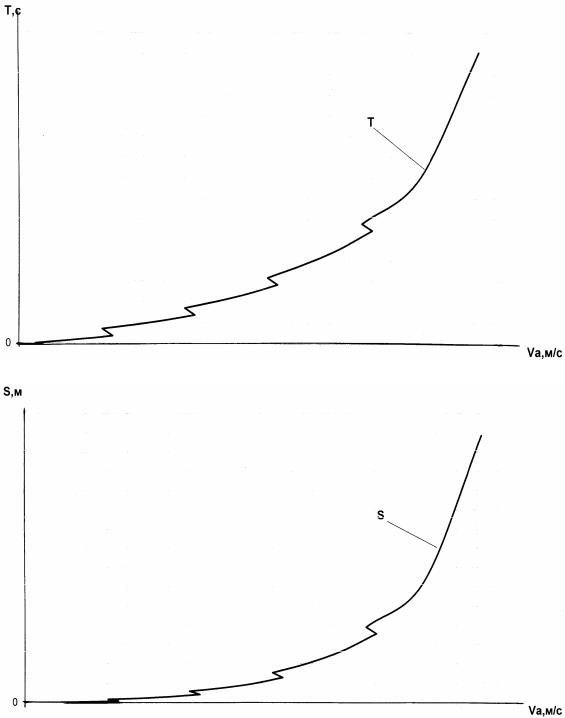
Рис. 2.4 График ускорений грузового автомобиля
2.5 Время и путь разгона автомобиля
Время разгона автомобиля определяется с использованием графика ускорений (рис.2.4). С этой целью кривые ускорений разбиваются на ряд участков ΔV. При этом предполагается, что на каждом участке от V1 до V2, от V2 до V3 и так далее. Автомобиль разгоняется с постоянным средним ускорением
|
|
|
|
22 |
jср |
= |
jн + jк |
, м/с2, |
(2.19) |
|
||||
|
2 |
|
|
|
где jн, jк– соответственно, ускорение в начале и конце участка, м/с2.
При изменении скорости на участке от Vк (скорость в конце участка) среднее ускорение равно приращению скорости ΔV, деленному на время ti движения на участке
jср |
= |
Vk −Vн |
= |
V , м/с2, |
(2.20) |
|
|||||
|
|
ti |
ti |
|
|
где ΔV=Vк–Vн, м/с2.
Для получения допускаемой точности расчетов интервал скоростей должен находиться в пределах от 0,5…0,8 м/с на 1-й передаче до 2,8…4,2 м/с– на высшей передаче; 1,4…2,8 м/с– на промежуточных передачах.
Время движения автомобиля на каждом участке определяется по формуле
tср |
= |
|
Vi |
|
|
j |
|
, с. |
(2.21) |
||
|
|
|
срi |
|
|
Скорость начала разгона автомобиля на каждой последующей передаче определяется так
V1=Vn–ΔVпер, м/с, (2.22) где Vn– конечная скорость, достигнутая автомобилем при его разгоне на предыдущей передаче, м/с;
Vпер– снижение (потеря) скорости в процессе переключения передачи, м/с. Точки А, В и С (рис. 2.4) пересечения или окончания кривых ускорений
на различных передачах определяют скорости, при которых следует производить переключение передач, чтобы интенсивность разгона была максимальной.
Время переключения передач tпер в среднем составляет:
-для передач без синхронизатора– tпер=2…4 с;
-для передач с синхронизаторами– tпер=1…2 с;
-для полуавтоматической трансмиссии– tпер=0,5 с.
Снижение скорости за время переключения передач определяется по
формуле |
|
ΔVпер=9,3*tпер*ψ, м/с. |
(2.23) |
Общее время разгона получается путем суммирования промежутков |
|
времени разгона на отдельных участках |
|
T=t1+t2+t3+…+ti, с |
(2.24) |
Путь разгона на участке Si определяется при помощи графика (рис.2.5) |
|
времени разгона по формуле |
|
ΔSi=ΔVср*Δtср, м, |
(2.25) |
где ΔVср– средняя скорость на участке в м/с. |
|
23
Средняя скорость на участке принимается равномерной и определяется по формуле
Vср |
= |
Vн −Vk |
, м/с. |
(2.26) |
|
||||
|
2 |
|
|
|
Расчет пути разгона производится по тем же участкам по скорости, что и при расчете времени разгона.
а) время разгона автомобиля
б) путь разгона автомобиля
Рис. 2.5 Графики времени и пути разгона автомобиля
24 |
|
Общий вид пути разгона определяется суммированием промежутков пути |
|
разгона на участках |
|
S=S1+S2+S3+…+Si, м. |
(2.27) |
Путь пройденный автомобилем за время переключения передач, |
|
определяется по выражению |
|
Sпер=Vн*tпер, м |
(2.28) |
где Vн– скорость в начальный момент переключения передач, м/с. |
|
3 Тормозная динамика автомобиля
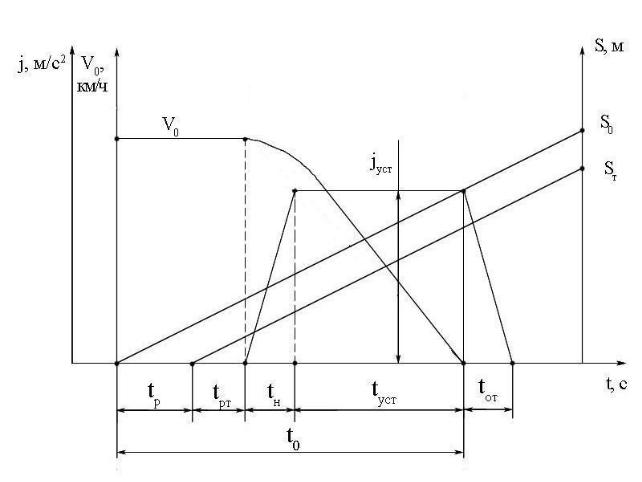
Для построения диаграммы торможения необходимо определить остановочный и тормозной путь, полное время и безопасное расстояние до препятствия.
Полное время, необходимое для остановки автомобиля определяем по формуле
t0 = t p + t pт + tн + tуст = tp + t pт + 0,5tн + КЭV0 /(35ϕ X ),
где tр– время реакции водителя, равное 0,5…1,3 с; tрт – время сбрасывания тормозного привода :
-для гидравлического привода –0,1…0,2 с;
-для пневматического привода– 0,4…0,8 с;
tн – время нарастания замедления –0,5…0,6 с;
tуст – время движения с установившимся замедлением; Vо– скорость автомобиля в начале торможения, км/ч;
КЭ – коэффициент эффективности действия тормозов:
-для грузовых автомобилей с максимальной массой до 10т КЭ – 1,5…1,6;
-для грузовых автомобилей с максимальной массой свыше 10т КЭ – 1,6…1,8;
-для легковых автомобилей КЭ – 1,1…1,2.
Установившееся замедление определяется по формуле
jУСТ = qϕ X / KЭ .
Время движения автомобиля с установившимся замедлением
t |
|
= |
КэV0 |
|
|
уст |
|
||||
|
|
35ϕ |
. |
||
|
|
|
|
x |
|
Для оценки эффективности рабочей тормозной системы, определяется тормозной путь
S |
Т |
= (t |
РТ |
+ 0.5t |
Н |
) V |
0 |
/ 3.6 +V 2 K |
Э |
/(254ϕ |
X |
). |
|
|
|
|
0 |
|
|
25
Минимально допустимые значения тормозного пути при начальной скорости 40 км/ч на горизонтальной дороге с сухим и чистым покрытием нормированы Правилами дорожного движения.
Рис.3.1 Диаграмма торможения автомобиля
Остановочный путь - расстояние S0 , на котором можно остановить автомобиль, движущийся со скоростью V0 определяется по формуле
SO = SP + SРТ + SН + SУСТ = (tР + tРТ + 0.5tН ) V0 / 3.6 +V02 KЭ /(254ϕ X ).
Безопасность можно обеспечить только в том случае, если остановочный путь автомобиля меньше расстояния Sa до препятствия и расстояние а = 0,5...1,0 м.
Sa = S0 + a.
Диаграмма торможения строится для двух режимов движения. Первый режим - для скорости 40 км/ч при φx= 0,7…0,8;
Второй режим - задается индивидуально для скоростей 60 км/ч, 90 км/ч и 110 км/ч при φx= 0,7…0,8 и φx= 0,2…0,3;.
Коэффициенты φx выбираются в зависимости от дорожных условий.

26
Основными расчетными вариантами для работ по данному разделу являются:
•сухая горизонтальная асфальтобетонная дорога φx=0,7…0,8;
•укатанная снежная дорога φx= 0,3, (при φx менее 0,4, КЭ = 1 независимо от типа автомобиля).
обледенелая дорога φx= 0,1.
4. Поперечная устойчивость автомобиля на горизонтальной дороге
Если на автомобиль действуют поперечные силы, то возможны два вида потери устойчивости боковое скольжение части или всех его осей и опрокидывание в поперечной плоскости.
4.1 Критические скорости по боковому скольжению
Если считать, что продольной силой, действующей на каждое из колес автомобиля, можно пренебречь, то предельную скорость Vaφ, движении по дуге окружности с заданным радиусом R без бокового скольжения определим из следующего выражения:
|
|
|
|
Vaφ≈3,13 Rϕ У , |
(4.1) |
||
где φу - коэффициент сцепления в поперечном направлении.
Если пренебречь динамическим перераспределением нормальных реакций между осями автомобиля (Rz1=G1; Rz2=G2 ) и считать, что cos θ=1 и φУ1=φУ2 , то можно показать, что
|
|
|
|
Va1φ= Va2φ=Vaφ≈3,13 Rϕy , |
(4.2) |
||
где Va1φ, Va2φ - критические скорости по боковому скольжению соответственно для передних и задних колес автомобиля.
θ – угол поворота управляемых колес.
Однако из практики известно, что в одних случаях может иметь место боковое скольжение передней оси без бокового скольжения задней, а в других случаях – наоборот.
Одной из основных причин неравенства Va1φ и Va2φ являются различия в величинах продольных сил, действующих на эти колеса. Для ведомых колес этими силами являются силы сопротивления качению, для ведущих колес – тяговые силы, а при торможении – тормозные силы.
Критические скорости по боковому скольжению Va1φ и Va2φ с учетом продольных сил, действующих на колесо, определим из следующих выражений
27 |
|
Va1φ = 3,13 R ϕ21 − K2п1 ; Va2φ= 3,13 R ϕ2 2 − K2п2 |
(4.3) |
где Кп – коэффициент продольной силы;
Кп = Rx , если Rx < Rz · φx
Rz
Для ведомого колеса можно принять Кп ≈ 0. Для ведущего колеса Rп находиться в пределах
Rxmin ≤ Кп ≤ Rxmax .
Rz Rz
Граничные значения продольной реакции Rx следует принимать по тяговой характеристике, т.е.
Rx min = RT6 min ; Rx max = RTI max,
где RT6 min – минимальное значение тяговой силы на высшей передаче; RTI max - максимальное значение тяговой силы на первой передаче.
Вариант расчета выбирается по последней цифре номера зачетной книжки согласно табл. 4.1. расчет ведется для 2-х значений коэффициента сцепления φ.
Таблица 4.1
№№ |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
пар. |
|
|
|
|
|
|
|
|
|
|
R,м |
50 |
60 |
70 |
80 |
90 |
100 |
110 |
120 |
130 |
140 |
φ1 |
0,8 |
0,7 |
0,6 |
0,5 |
0,6 |
0,7 |
0,8 |
0,7 |
0,6 |
0,5 |
φ2 |
0,1 |
0,08 |
0,1 |
0,08 |
0,1 |
0,12 |
0,14 |
0,08 |
0,15 |
0,1 |
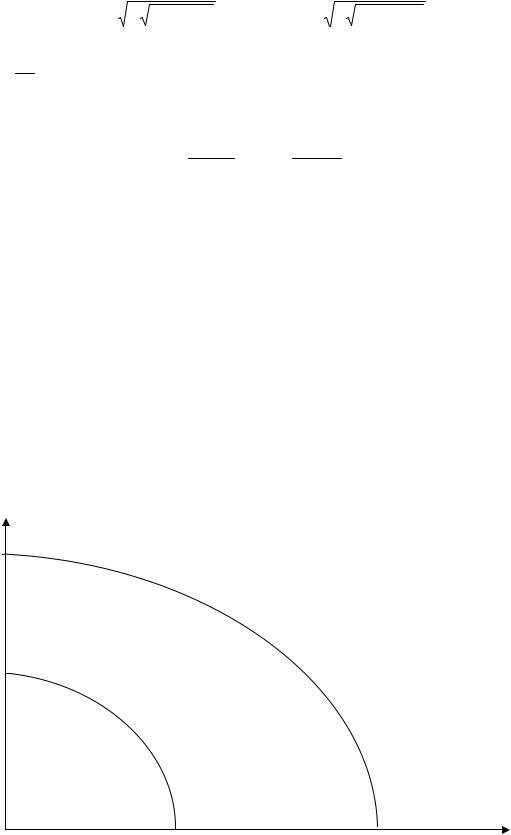
Vaφ , м/с
φх2
φх1
Кп Рис. 4.1 Влияние тяговой силы на критическую скорость движения
автомобиля по условию бокового скольжения

28
Полученные величины критических скоростей сравниваются. При этом аннулируется влияние тяговой силы на критическую скорость. Результаты расчета отражаются на графике.
4.2 Критическая скорость по опрокидыванию
Устойчивость автомобиля по поперечному прокладыванию при его круговом движении принять характеризовать критической скоростью.
Vкр. оп. = 3,13 |
|
B • R |
|
, |
(4.4) |
|
|||||
|
|
2Hg |
|
||
где В – колея передних или задних колес автомобиля, м. Обычно при определении условий опрокидывания автомобиля считают
В1 = В2 = В Hg – высота центра масс, м.
Из рассмотренных выше двух видов потери устойчивости: опрокидывания и бокового скольжения – первый является наиболее опасным. Поэтому автомобиль стремятся спроектировать таким образом, чтобы
Vaφ < Vкр. оп. |
(4.5) |
||
Условие (4.5) выполняется, если |
B |
> φу (см. уравнения (4.1) и (4.4)). |
|
2Hg |
|||
|
|
||
4.3 Критические углы по устойчивости автомобиля на дороге с поперечным уклоном
1.Критический угол βφ по боковому скольжению автомобиля определяется по формуле
βφ = arctg φy. |
(4.6) |
2.Критический угол βкр. оп. По поперечному опрокидыванию
βкр. оп. = arctg |
B |
(4.7) |
|
2Hg |
|||
|
|
29
Библиографический список
Основная литература
1.Литвинов, А.С. Автомобиль. Теория эксплуатационных свойств [Текст] / А.С. Литвинов, Я.С. Фаробин. – М. : Машиностроение, 1989. – 240 с.
2.Автомобильный справочник [Текст] / Б.С. Васильев [и др.] ; под общ. ред. В.М. Приходько. – М. : Машиностроение, 2004. – 704 с.
Дополнительная литература
3.Основы теории автомобиля и трактора [Текст] / В.В. Иванов [и др.]. – М. : Высш. шк., 1977. – 245 с.
4.Илларионов, В.А. Эксплуатационные свойства автомобиля [Текст] / В.А. Илларионов. – М.: Машиностроение, 1966. – 280 с.
30
Оглавление
Общие положение……………………………………………………………... .. 3 1 Расчет оценочных показателей тягово–скоростных свойств…………. ... ... 5 1.1 Определение весовых параметров автомобиля……………………….. ... ...5 1.2 Подбор шин……………………………………………………………… ... ...6
1.3Определение максимальной стендовой мощности двигателя……….. ... ... 7
1.4Внешняя скоростная характеристика двигателя………………………. ... .10
1.5Определение передаточного числа главной передачи…………………... ..12
1.6Определение передаточных чисел коробки передач………………….. ... ..12 2 Расчет показателей тяговой динамики автомобиля……………………. ... ... 14
2.1Тяговый баланс……………………………………………………………... ..14
2.2Мощностной баланс………………………………………………………... ..16
2.3Динамический паспорт автомобиля…………………………………….. ... . 18
2.4Ускорение автомобиля…………………………………………………….. ... 20
2.5Время и путь разгона автомобиля………………………………………... ... 21 3 Тормозная динамика автомобиля…………………………………………. ... .. 24 4 Поперечная устойчивость автомобиля на горизонтальной дороге………... .. 26
4.1 Критические скорости по боковому скольжению... ... ... ... ... ... ... ... ... ... .. 26 4.2 Критическая скорость по опрокидыванию... ... ... ... ... ... ... ... ... ... ... ... ... .. 28 4.3 Критические углы по устойчивости автомобиля на дороге с поперечным
уклоном... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... 28 Библиографический список……………………………………………………... . 29