

2421
.pdf11
На основании полученных данных необходимо построить график изменения параметров обгона в зависимости от скорости обгоняемого ТС (рис. 5).
Рис. 5. График изменения параметров обгона
5. Незавершенный обгон
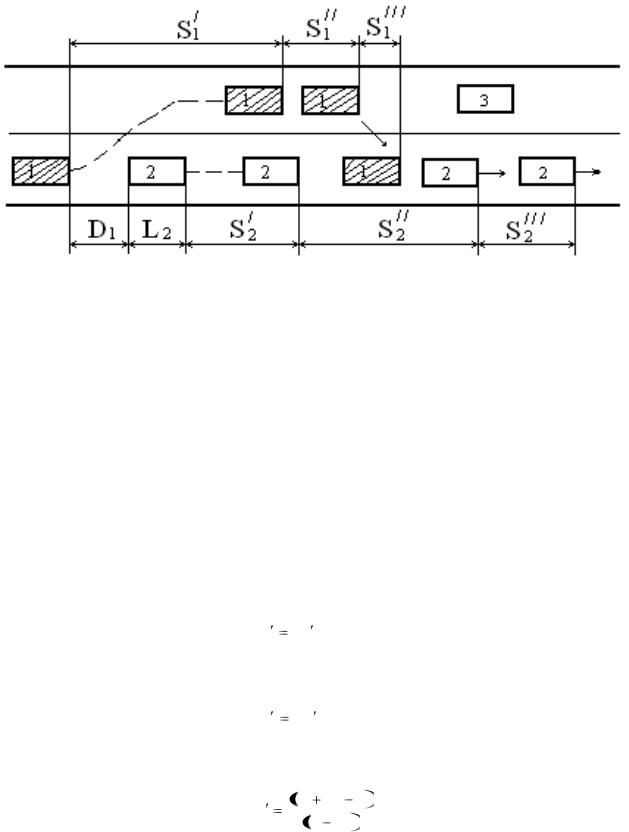
Выше был рассмотрен обгон, в процессе которого обгоняющий автомобиль возвращается на свою полосу движения впереди обгоняемого автомобиля. В практике часто встречаются случаи, когда водителю, начавшему обгон, не удается его закончить. Причина может заключаться либо во внезапном появлении препятствия, либо в неверном первоначальном расчете. Убедившись в невозможности закончить обгон, водитель вынужден уменьшить скорость и возвратиться в прежнее положение. Такой обгон называют незавершенным
(рис. 6).
12
Рис. 6. Незавершенный обгон
В начале незавершенного обгона (время t /) обгоняющий автомобиль, двигаясь со скоростью V1, выезжает на соседнюю полосу движения. Решив отказаться от обгона, водитель снижает скорость автомобиля до минимально устойчивой скорости V1/. Учитывая наличие опасности для движения, водитель тормозит обычно с максимальной интенсивностью (время t //). Затем, ведя автомобиль с минимально устойчивой скоростью, водитель пропускает вперед обгоняемый автомобиль и возвращается на прежнюю полосу (время t ///). Возможность выполнения такого маневра зависит как от тяговой, так и от тормозной
динамичности автомобиля. |
|
Определим время и путь незавершенного обгона. |
|
Перемещение обгоняющего автомобиля на первом этапе обгона |
|
S1 V1t , |
(9) |
где t – время первого этапа, с.
– время первого этапа, с.
Перемещение обгоняемого автомобиля за время первого этапа
S2 V2t . |
|
|
|
|
Время первого этапа |
|
|
|
|
t |
D1 |
L2 |
e |
, |
V1 |
V2 |
|
||
|
|
|
||
(10)
(11)
где D1 – дистанция безопасности, м;
e – расстояние между передними частями обгоняющего и обгоняемого автомобилей в момент окончания первого этапа, м.

|
13 |
|
|
Время второго этапа |
|
|
|
t |
V1 V1 |
, |
(12) |
|
|||
|
jз |
|
|
где V1 – минимально устойчивая скорость 3 – 5 м/с; jз – замедление, м/с2.
– минимально устойчивая скорость 3 – 5 м/с; jз – замедление, м/с2.
Перемещение обгоняющего автомобиля в течение второго этапа обгона
S |
1 |
V t |
0.5 j |
з |
t |
2 . |
|
|
|
(13) |
||
|
1 |
|
|
|
|
|
|
|
|
|||
Время третьего этапа обгона |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
S1 |
L2 |
D2 |
S2 |
e |
. |
(14) |
||||
|
|
|
V2 |
|
|
V1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
Путь обгоняющего автомобиля за время третьего этапа |
|
|||||||||||
S1 |
|
S1 |
L2 |
D2 |
S2 |
e |
V1 . |
(15) |
||||
|
|
V2 |
|
|
V1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
Зная продолжительность каждого этапа и перемещения обгоняющего ав- |
||||||||||||
томобиля, можно найти и полный путь незавершенного обгона |
|
|||||||||||
SН .О |
|
S1 |
S1 |
|
|
S1 . |
|
|
|
(16) |
||
Соответственно, время незавершенного обгона |
|
|
|
|
||||||||
tН .О |
|
t |
t |
t . |
|
|
|
|
(17) |
|||
Полученные значения показателей незавершенного обгона сводят в таблицы. По данным таблицы строится график изменения параметров незавершенного обгона в зависимости от скорости обгоняемого транспортного средства.
6. Тормозная динамичность автомобиля
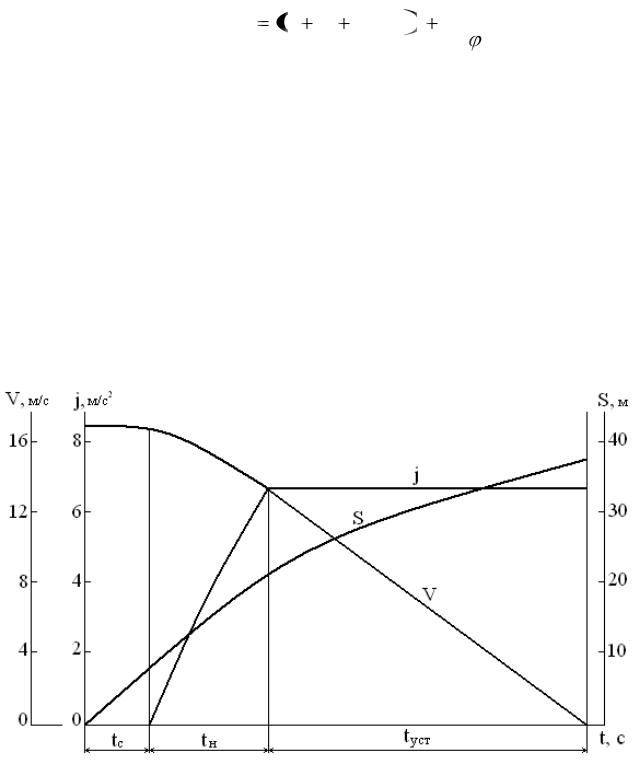
Оценочными показателями тормозной динамичности автомобиля служат среднее замедление за период полного торможения и путь автомобиля от начала воздействия водителя на орган управления до остановки.
Водитель, заметив препятствие, оценивает дорожную обстановку, принимает решение о торможении, переносит ногу с педали подачи топлива на тормозную педаль.
Время tр, необходимое для этих действий – время реакции водителя – обычно находится в пределах 0,3 … 2,5 с. Оно зависит от квалификации водителя, его возраста, степени утомления и других факторов.

14
Время tс (время запаздывания тормозной системы) необходимо для устранения зазоров в соединениях тормозного привода и перемещения всех его деталей. Это время, зависящее от конструкции и технического состояния тормозного привода, колеблется в среднем от 0,2 … 0,3 с (гидравлический привод) до 0,6 … 0,8 с (пневматический привод).
Время tн (время нарастания замедления) обычно находится в пределах 0,4 … 0,6 с. Интервал времени tуст (время, при котором замедление постоянно) можно рассчитать по следующей формуле:
t уст |
VKэ |
, |
(18) |
|
3.6g |
||||
|
|
|
где Кэ – коэффициент эффективности торможения.
У многих автомобилей достичь одновременной блокировки всех колес не удается как по причинам конструктивного характера, так и вследствие ухудшения эффективности тормозной системы и шин в процессе эксплуатации. Поэтому для приближения результатов расчета к фактическим данным в формулы вводят поправочный коэффициент Кэ. Примерные значения его для сухого асфальтобетонного или цементобетонного покрытия (φ = 0,7) даны в табл. 4.
При малом коэффициенте сцепления величина тормозных сил у любого автомобиля достаточна для доведения всех колес до скольжения. Поэтому при φ ≤ 0,7 следует принимать Кэ=1 для автомобилей всех типов.
|
|
Таблица 4 |
|
Коэффициент эффективности торможения |
|||
|
|
|
|
Автомобили |
Без нагрузки |
С полной нагрузкой |
|
|
|
|
|
Легковые |
1,1 … 1,15 |
1,15 … 1,2 |
|
|
|
|
|
Грузовые с максимальной массой |
1,1 … 1,3 |
1,5 … 1,6 |
|
до 10 т и автобусы длиной до 7,5 м |
|||
|
|
||
|
|
|
|
Грузовые с максимальной массой |
1,4 … 1,6 |
1,6 … 1,8 |
|
свыше 10 т и автобусы более 7,5 м |
|||
|
|
||
|
|
|
|
Учитывая коэффициент эффективности торможения, формулы для замедления и остановочного пути приобретают следующий вид:
g
j |
уст |
|
(19) |
|
K |
; |
|||
|
|
|
||
э
15
|
|
|
|
|
|
|
|
K V 2 |
|
|
|
|
|
|
|
SО |
tР tC |
0.5tН V |
|
э |
. |
(20) |
|||
|
|
|
|
g |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||
Полученные значения сводят в табл. 5. |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Таблица 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V, |
Jуст, |
tр, |
tср, |
tн, |
tуст, |
|
Sост, |
|
Sт, |
|
Sю, |
|
км/ч |
м/с2 |
c |
c |
c |
c |
|
|
м |
|
м |
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
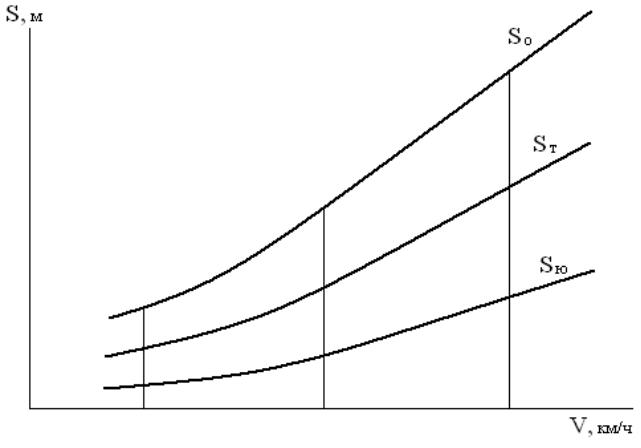
После заполнения табл. 5 необходимо построить тормозную диаграмму автомобиля (рис. 7) и график тормозного, остановочного путей и пути «юза»
(рис. 8).
Рис. 7. Тормозная диаграмма автомобиля
16
Рис. 8. График тормозного, остановочного путей и пути «юза»
7. Устойчивость автотранспортных средств
Устойчивость – совокупность свойств, определяющих положение автотранспортного средства или его звеньев при движении. Нарушение устойчивости АТС выражается в произвольном изменении направления движения, его опрокидывании или скольжении шин по дороге. Оценочными показателями устойчивости являются критические параметры движения и положения. Различают продольную и поперечную устойчивость автомобиля. Признаками потери поперечной устойчивости являются: изменение направления движения (курсовая устойчивость); поперечное скольжение (занос) и опрокидывание, а продольной устойчивости – буксование ведущих колес и опрокидывание.
Потеря автомобилем продольной устойчивости выражается, как правило, в буксовании ведущих колес, часто наблюдаемом при преодолевании автопоездом затяжных подъемов при скользкой дороге. Опрокидывание АТС в продольной плоскости возможно лишь при дорожно-транспортном происшествии.

17
Показателями курсовой устойчивости служат средняя скорость поперечного смещения без корректирующих воздействий со стороны водителя и средняя угловая скорость поворота рулевого колеса. Эти показатели определяют экспериментально при испытании АТС.
Показателями поперечной устойчивости автомобиля при криволинейном движении являются критические скорости (максимально возможные) по боковому скольжению и боковому опрокидыванию; критические углы косогора (угол поперечного уклона дороги) по боковому скольжению и по боковому опрокидыванию.
Критическая скорость автомобиля по заносу рассчитывается по формуле
|
|
|
|
|
|
VЗАН 11.3 |
R y , |
км/ч, |
(21) |
||
где φy – коэффициент поперечного сцепления; |
|
||||
R – радиус поворота автомобиля в соответствующей точке трассы. |
|
||||
Коэффициент поперечного сцепления принимается равным |
|
||||
y |
0.8 |
x , |
|
(22) |
|
где φx – коэффициент продольного сцепления. |
|
||||
Радиус поворота подсчитывается по формуле |
|
||||
R |
L |
|
, |
(23) |
|
|
tgQСР |
|
|
||
где L – база автомобиля; |
|
|
|
|
|
QСР – средний угол поворота управляемых колес автомобиля. |
|
||||
QСР |
i |
, |
(24) |
||
|
|
|
|
|
|
где α – угол поворота рулевого колеса;
i – передаточное отношение рулевого привода.
Критическая скорость по опрокидыванию определяется из выражения
VОПР |
8 |
|
BR |
|
|
, |
(25) |
|
|
|
|
|
|
||||
|
G |
К |
h2 |
|
||||
|
|
hЦ |
|
КР |
|
|
|
|
|
|
CYA |
|
GК hКР |
|
|
|
|
|
|
|
|
|
|
|
||
где B – колея автомобиля, м;
hЦ – высота центра тяжести автомобиля, м; GК – вес кузова, кг;
hКР – плечо крена, м;
CYA – суммарная угловая жесткость подвесок автомобиля, кг·м/рад.
18
После проведения расчетов данные заносят в таблицу, и завершающим этапом является построение графиков зависимостей VЗАН=f(α), VОПР=f(α).
8. Компоновочные параметры автомобиля и их влияние на безопасность дорожного движения
8.1. Расчет ширины динамического коридора
Под динамическим коридором автотранспортного средства понимается ширина полосы дороги (проезжей части), необходимой для безопасного его движения с заданной скоростью.
На прямолинейном участке динамический коридор определяют по эмпирическим формулам следующего типа:
BK  V BA
V BA  (26)
(26)
где  – коэффициент, зависящий от квалификации водителя и его психофизио-
– коэффициент, зависящий от квалификации водителя и его психофизио-
логического состояния, |
0,015 0,054 ; |
BA – габаритная ширина автомобиля, м;
V – скорость движения автомобиля, м/с.
Значения BA и скорость выбирают по заданию. Расчетные значения BK , м, полученные по формуле (26), указываются в табл. 6, по ним строят график зависимости динамического коридора от скорости автомобиля BK =f(V).
Таблица 6
V, км/ч
V, м/с
BK , м
На криволинейном участке дороги динамический коридор можно рассчитать на основании формулы
B1 |
R |
R |
ВН |
, |
(27) |
K |
|
Н |
|
|
где RН , RВН – наружный и внутренний габаритные радиусы поворота автомобиля;
BK1 – габаритная ширина проезжей части дороги в статике, т.е. без учета скорости и поправочного коэффициента (запаса), принимаемого в расчетах равным 0,3.

19
Как известно, средний радиус поворота (траектория движения точки пересечения оси заднего моста и продольной оси автомобиля) определяется по формуле
RСР tgL , (28)
где L – база автомобиля, м;
 - угол поворота управляемых колес, град.
- угол поворота управляемых колес, град.
Задаваясь величиной угла , по формуле (28) определяют RСР , значения которого заносят в табл. 7.
Видно, что
|
|
R |
|
|
R |
BA |
; |
|
|
|
(29) |
|
|
|
|
ВН |
СР |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
Н |
|
|
L |
C 2 |
R |
ВН |
B |
2 |
, |
(30) |
|
|
|
|
|
1 |
|
|
А |
|
|
|||
где C1 – передний свес автомобиля.
Расчетные значения RВН , RН , BK1 заносят в табл. 7.
Для расчета динамического коридора BK на криволинейном участке, в зависимости от скорости и угла поворота управляемых колес, значения V задаются с учетом показателей устойчивости АТС, а предельное значение  задается по техническим характеристикам автомобиля. Все значения BK , рассчитанные по формуле (26), подставляя в неѐ вместо BA значения BK1 , заносят в табл. 7 и строят графики зависимости динамического коридора от угла поворота управляемых колес при различных значениях скорости автомобиля.
задается по техническим характеристикам автомобиля. Все значения BK , рассчитанные по формуле (26), подставляя в неѐ вместо BA значения BK1 , заносят в табл. 7 и строят графики зависимости динамического коридора от угла поворота управляемых колес при различных значениях скорости автомобиля.
|
|
|
|
|
|
Таблица 7 |
|
|
|
|
|
|
|
|
|
2 |
4 |
8 |
12 |
16 |
20 |
24 |
|
RСР , м
RВН , м
RН , м
BK1
BК .КР , м (V= км/ч)
BК .КР , м (V= км/ч)
BК .КР , м (V= км/ч)

20
8.2. Расчет дистанции безопасности при движении автомобиля
Безопасную дистанцию между автомобилями определяют по различным эмпирическим формулам, так как на неѐ влияет очень много факторов: скорость и техническое состояние автомобиля; дорожные условия; среда; вид транспорта; квалификация, степень утомления и культура вождения водителя и др.
Динамический габарит автомобиля включает его длину и дистанцию безопасности между движущимися транспортными средствами. Допустим, что дистанция должна быть равна полному остановочному пути, тогда
|
|
|
|
|
V 2 |
|
|
||||
|
|
LД LА tР tСР |
0,5tН V |
|
|
|
L0 , |
(31) |
|||
|
2 j |
|
|||||||||
|
|
|
|
|
З |
|
|
||||
где tР |
– время реакции водителя; |
|
|
|
|
|
|
|
|
||
tСР |
– время срабатывания тормозных механизмов; |
|
|
||||||||
t Н |
– время наращивания тормозных сил до максимальных значений при |
||||||||||
экстренном торможении; |
|
|
|
|
|
|
|
|
|||
jЗ |
– установившееся замедление. |
|
|
|
|
|
|
|
|
||
LА |
– длина автомобиля; |
|
|
|
|
|
|
|
|
||
L0 |
– зазор между медленно движущимися автомобилями (2-4 м). |
|
|
||||||||
Расчетные данные при разных скоростях автомобилей нужно вписать в |
|||||||||||
табл. 8. |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Таблица 8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
V, км/ч |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
LД , м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
После заполнения таблицы необходимо построить график зависимости динамического габарита автомобиля от скорости движения.
9. Поворачиваемость автотранспортных средств
Поворачиваемостью называют способность автомобиля изменять направление движения баз поворота управляемых колес. Существует две причины поворачиваемости под действием боковых сил: увод колес в результате попереч-