

2268
.pdfЛабораторная работа №11 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ ЛЕСОПОСАДОЧНОЙ
МАШИНЫ ДЛЯ ЛЕСОВОССТАНОВЛЕНИЯ НА ВЫРУБКАХ
Цель работы: приобретение навыков в составлении кинематических схем лесопосадочных машин, предназначенных для лесовосстановления на вырубках.
Время на выполнение работы – 4 часа. Задание.
Марка лесопосадочной машины: СБН-1А. Глубина хода сошника: 30 см.
Шаг посадки: 0,5; 1; 1,5 м.
Контрольные вопросы.
1.Классификация способов посадки и условий применения лесопосадочных машин.
2.Назначение и области применения лесопосадочных машин для лесовосстановления на вырубках.
3.Составные части лесопосадочной машины, их классификация, устройство и назначение.
4.Технологический процесс лесопосадочной машины.
5.Регулировки лесопосадочной машины.
Лабораторная работа №12 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ
ПОЧВООБРАБАТЫВАЮЩЕЙ ФРЕЗЫ
Цель работы: приобретение навыков в составлении кинематических схем почвообрабатывающих фрез.
Время на выполнение работы – 2 часа. Задание.
Марка почвообрабатывающей фрезы: ФЛУ-0,8. Глубина обработки почвы: 10, 13, 16 см.
Контрольные вопросы.
1.Назначение и области применения почвообрабатывающих фрез.
2.Составные части почвообрабатывающей фрезы, их классификация, устройство и назначение.
3.Технологический процесс почвообрабатывающей фрезы.
4.Регулировки почвообрабатывающей фрезы.
11
Лабораторная работа №13 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ МАШИНЫ ДЛЯ
УДАЛЕНИЯ НЕЖЕЛАТЕЛЬНОЙ ДРЕВЕСНО-КУСТАРНИКОВОЙ РАСТИТЕЛЬНОСТИ
Цель работы: приобретение навыков в составлении кинематических схем машин для удаления нежелательной древесно-кустарниковой растительности.
Время на выполнение работы – 2 часа. Задание.
Марка машины: рубщик коридоров роторный РКР-1,5. Контрольные вопросы.
1.Классификация, назначение и области применения машин для удаления дре- весно-кустарниковой растительности.
2.Составные части рубщика коридоров роторного, их устройство и назначение.
3.Технологический процесс машины.
4.Регулировки машины.
Лабораторная работа №14 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ МАШИНЫ ДЛЯ
ЗАЩИТЫ ЛЕСА ОТ ВРЕДИТЕЛЕЙ И БОЛЕЗНЕЙ
Цель работы: приобретение навыков в составлении кинематических схем машин для защиты леса от вредителей и болезней.
Время на выполнение работы – 2 часа. Задание.
Марка машины: опыливатель ОПС-30Б. Контрольные вопросы.
1.Классификация, назначение и области применения машин для защиты леса от вредителей и болезней.
2.Составные части опыливателя, их устройство и назначение.
3.Технологический процесс опыливателя.
4.Регулировки опыливателя.
12
Лабораторная работа №15 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ МАШИНЫ ДЛЯ
ОБРАБОТКИ ЛЕСНЫХ СЕМЯН
Цель работы: приобретение навыков в составлении кинематических схем машин для обработки лесных семян.
Задание. Марка машины: обескрыливатель семян.
Контрольные вопросы.
1.Классификация, назначение и области применения машин для обработки лесных семян.
2.Составные части обескрыливателя семян, их устройство и назначение.
3.Технологический процесс обескрыливателя семян.
4.Регулировки обескрыливателя семян.
Лабораторная работа №16 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ МАШИНЫ ДЛЯ
ВЫКОПКИ ПОСАДОЧНОГО МАТЕРИАЛА
Цель работы: приобретение навыков в составлении кинематических схем машин для выкопки посадочного материала.
Время на выполнение работы – 2 часа. Задание.
Марка машины: выкопочная машина ВМ-1,25. Глубина выкопки – 20, 25, 30 см.
Контрольные вопросы.
1.Классификация, назначение и области применения машин для выкопки посадочного материала.
2.Составные части выкопочной машины, их устройство и назначение.
3.Технологический процесс выкопочной машины.
4.Регулировки выкопочной машины.
13
Лабораторная работа №17 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ МАШИНЫ ДЛЯ
ТУШЕНИЯ ЛЕСНЫХ ПОЖАРОВ ГРУНТОМ
Цель работы: приобретение навыков в составлении кинематических схем машин для тушения лесных пожаров грунтом.
Время на выполнение работы – 2 часа. Задание.
Марка машины: грунтометательная машина. Глубина хода роторов – 12, 15, 18 см.
Контрольные вопросы.
1.Классификация, назначение и области применения машин для тушения лесных пожаров грунтом.
2.Составные части грунтометательной машины, их устройство и назначение.
3.Технологический процесс грунтометательной машины.
4.Регулировки грунтометательной машины.
Лабораторная работа №18 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ ТРЕЛЕВОЧНОГО
ЗАХВАТА
Цель работы: приобретение навыков в составлении кинематических схем захватов для трелевки древесины.
Время на выполнение работы – 2 часа. Задание.
Марка трелевочного захвата: ПТН-0,8. Контрольные вопросы.
1.Классификация, назначение и области применения захватных устройств трелевочных машин.
2.Элементы конструкции трелевочного захвата, их устройство и назначение.
3.Технологический процесс трелевочного захвата.
4.Конструктивные и технологические параметры, влияющие на условия работы трелевочного захвата.
14
Лабораторная работа №19 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫ
ГИДРОМАНИПУЛЯТОРА
Цель работы: приобретение навыков в составлении кинематических схем гидроманипуляторов.
Время на выполнение работы – 2 часа. Задание.
Марка гидроманипулятора: ЛВ-210. Вылет стрелы – 3,8 м.
Ход удлинителя – 2,2 м.
Контрольные вопросы.
1.Классификация, назначение и области применения гидроманипуляторов.
2.Элементы конструкции гидроманипулятора, их устройство и назначение.
3.Изменяемые эксплуатационные параметры гидроманипулятора.
Лабораторная работа №20 ИЗУЧЕНИЕ ОСОБЕННОСТЕЙ ПРОЕКТИРОВАНИЯ
ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ ХАРВЕСТЕРА
Цель работы: приобретение навыков проектирования технологического оборудования харвестера.
Время на выполнение работы – 2 часа. Задание.
Марка харвестера: Амкодор 2551.
Контрольные вопросы.
1.Классификация, назначение и области применения харвестеров.
2.Тип харвестера по компоновке технологического оборудования.
3.Элементы конструкции харвестерной головки, их устройство и назначение.
4.Технологический процесс харвестера.
15
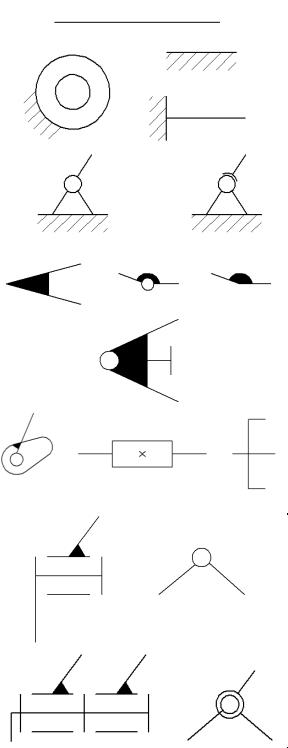
Приложение 1
Основные условные обозначения, используемые при составлении кинематических схем лесохозяйственных и лесозаготовительных машин
(ГОСТ 2.770-68 «Единая система конструкторской документации. Обозначения условные графические в схемах. Элементы кинематики»)
|
Наименование |
Обозначение |
1. |
Вал, валик, ось, стержень, шатун и т.п. |
|
|
|
|
2. |
Неподвижное звено (стойка): для указания не- |
|
подвижности любого звена часть его контура по- |
|
|
крывается штриховкой |
|
|
|
|
|
3. |
Соединение частей звена |
|
3.1. Неподвижное |
|
|
|
|
|
3.2. Неподвижное, допускающее регулировку |
|
|
|
|
|
3.3. Неподвижное соединение детали с валом, |
|
|
стержнем |
|
|
|
|
|
4. |
Кинематическая пара |
|
4.1. Вращательная |
|
|
|
|
|
4.2. Вращательная многократная |
|
|
|
|
|
|
16 |
|
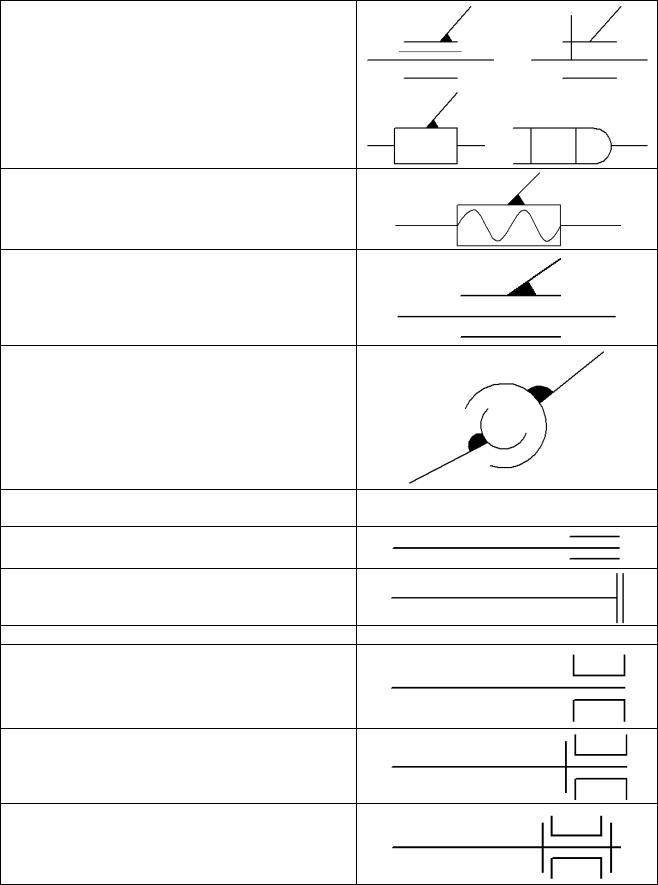
Продолжение приложения 1
4.3.Поступательная
4.4.Винтовая
4.5.Цилиндрическая
4.6.Карданный шарнир
5. Подшипники скольжения и качения на валу (без уточнения типа):
5.1. Радиальные
5.2 Упорные
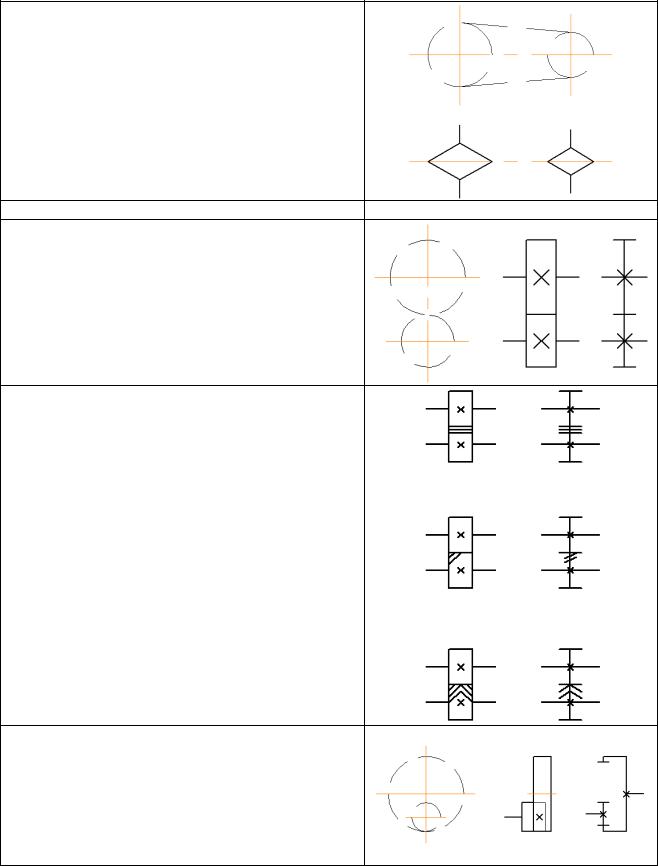
6. Подшипники скольжения:
6.1.Радиальные
6.2.Радиально-упорные односторонние
6.3.Радиально-упорные двусторонние
17
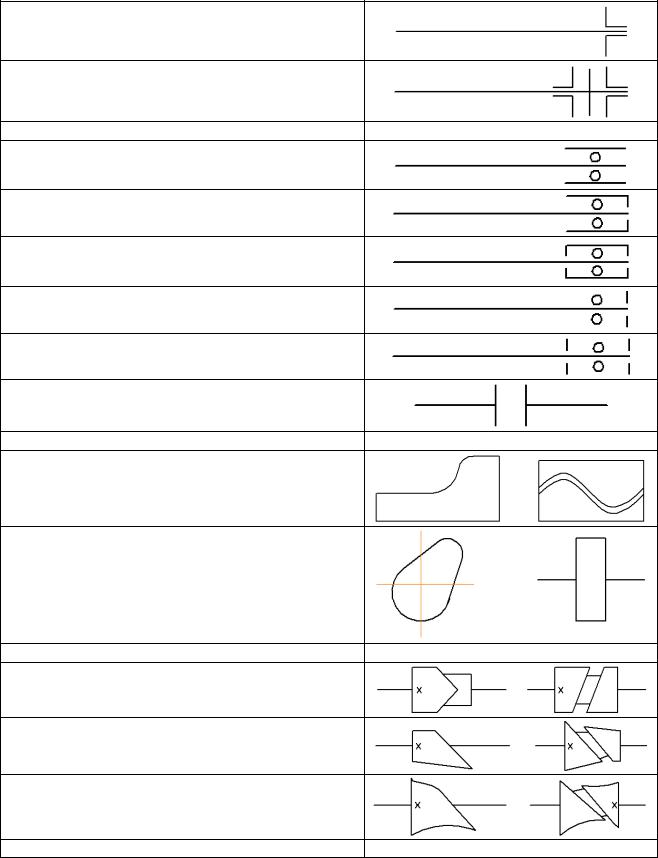
Продолжение приложения 1
6.4.Упорные односторонние
6.5.Упорные двусторонние
7. Подшипники качения:
7.1.Радиальные
7.2.Радиально-упорные односторонние
7.3.Радиально-упорные двусторонние
7.4.Упорные односторонние
7.5.Упорные двусторонние
8.Муфта (общее обозначение без уточнения типа)
9.Кулачки плоские:
9.1.Продольного перемещения
9.2.Вращающиеся
10. Кулачки барабанные:
10.1.Цилиндрические
10.2.Конические
10.3.Криволинейные
11. Звено рычажных механизмов двухэлементное
18
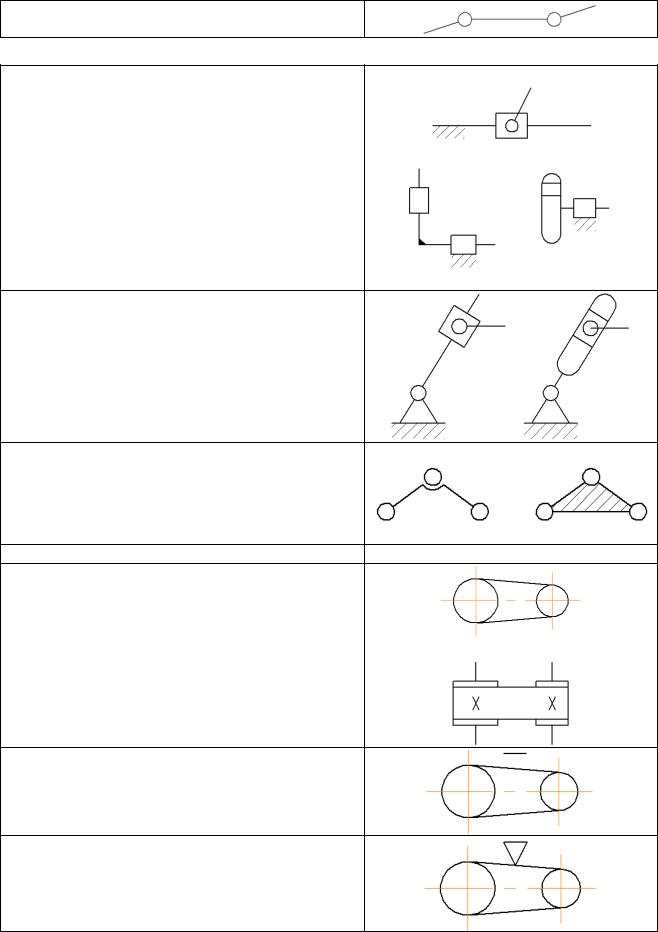
11.1. Кривошип, коромысло, шатун
Продолжение приложения 1
11.2. Ползун
11.3. Кулиса
12.Звено рычажных механизмов трехэлементное
13.Ременные передачи:
13.1.Без уточнения типа ремня
13.2.Плоским ремнем
13.3.Клиновидным ремнем
19
Продолжение приложения 1
14.Цепная передача (общее обозначение без уточнения типа цепи)
15.Передачи зубчатые (цилиндрические):
15.1. Внешнее зацепление (общее обозначение без уточнения типа зубьев)
15.2. Внешнее зацепление с прямыми, косыми и шевронными зубьями
15.3. Внутреннее зацепление
20