

2598
.pdfБольшое влияние на средства передачи информации оказывают глобальные сети Internet. В последние годы наметилась интеграция АСУ ТП и АСУП на базе сервера БД РВ, являющегося ядром интегральной системы управления.
Сформированная архитектура РСУ включает уровни датчиков и исполнительных механизмов (уровень 0 или полевой уровень), устройства связи с объектом (1-й уровень), контроллеров (2-й уровень) и автоматизированных рабочих мест (АРМ) оператора (3-й уровень или диспетчерский уровень). В последние годы, однако, эта архитектура претерпевает существенные изменения. Все большее число фирм (OSI Soft, Simens, Iconics и ряд др.) поставляют на рынок промышленной автоматизации законченные решения по автоматизации технологических процессов и предприятий в целом, обеспечивая как горизонтальную, так и вертикальную интеграцию вычислительных ресурсов с использованием единой базы данных (сервера) для решения всего комплекса задач управления предприятием. Располагаясь в иерархической структуре РСУ между 3-м уровнем и уровнем АСУП (4- й административный или бизнес-уровень), сервер единой базы данных трансформирует информацию с нижних уровней, в том числе от систем АСКУЭ – автоматизированной системы контроля и учета энергоресурсов, АСОДУ – автоматизированной системы оперативнодиспетчерского управления и др., передает ее в унифицированном виде на административный уровень. Таким образом, сервер единой базы данных становится ядром интегрированной системы управления предприятия в целом.
Программируемые микропроцессорные контроллеры. Ремиконты и ломиконты
Технической основой современных распределенных систему правления, в частности распределенных автоматизированных систем управления технологическими процессами (АСУ ТП), являются микропроцессоры (МП) и микропроцессорные системы (МПС).
МПС называется любая вычислительная, информационноуправляющая или управляющая система, устройством обработки информации которой является микропроцессор. Она выполняет функции сбора данных (коммутация сигналов, их унификация, фильтрация, преобразование в цифровую форму, ввод в базу данных и др.), регулирования и управления, визуализации всей информационной базы данных, изменения установок, параметров регуляторов и самих алгоритмов, оптимизации и т.д. Использование МП, МПС (в т.ч. микроЭВМ) для решения перечисленных задач дает возможность достичь
650
следующих целей:
1)заменить аналоговые технические средства на цифровые там, где переход к цифровым средствам повышает точность, расширяет функциональные возможности и увеличивает гибкость систем управления;
2)заменить технические средства с жесткой логикой на программируемые (с возможностью изменения программы) устройства или контроллеры;
3)заменить одну мини-ЭВМ системой из нескольких микроЭВМ, когда необходимо обеспечить децентрализованное управление производством или технологическим процессом с повышенной надежностью и живучестью или когда возможности мини-ЭВМ полностью не используются.
МПС могут выполнять в подсистемах распределенной АСУ ТП все типовые функции контроля, измерения, регулирования, управления, представления информации оператору.
Программируемый микропроцессорный контроллер (ПМК) выполняет функции преобразования, обработки, хранения информации и выработки команд управления и является, по сути, специализированной управляющей микроЭВМ для работы в локальных и распределенных системах управления в реальном времени в соответствии с фиксированным набором рабочих программ, размещенных в ПЗУ и ОЗУ.
По своему назначению – областям проблемной ориентации – ПМК бывают:
1)микроконтроллерами, предназначенными для замены устройств электроавтоматики на крупносерийном и массовом производстве – релейных и логических схем, командных аппаратов; такие ПМК логического типа появились на базе развития и слияния средств вычислительной техники на МП, релейной бесконтактной автоматики и циклового программного управления технологическим оборудованием, именно логические ПМК положили начало в ряду программируемых контроллеров;
2)микроконтроллерами регулирующего типа, предназначенными для замены аналоговых, импульсивных и цифровых регуляторов, обычно использовавшихся как основа средств автоматического регулирования;
3)микроконтроллерами координирующего типа, предназначенными для реализации функций программных задатчиков, специальных алгоритмов логико-командного управления периферийными устройствами, функций координирующей микроЭВМ в распределенных АСУ ТП (ведущий контроллер).
Наиболее распространенными являются микроконтроллеры регулирующего типа (ремиконты) и логического типа (ломиконты).
651
Началом развития микроэлектронных средств вычислительной техники является создание в 1971 г. фирмой «Интел» (США) программируемой (с помощью программных средств) микроинтегральной схемы, названной микропроцессором (МП). Почти все микропроцессоры изготавливаются на кремниевых кристаллах с длиной стороны куба 6,4 мм. В зависимости от конструктивного исполнения интегральная микросхема имеет от 16 до 64 выводов.
Основные особенности ПМК, отличающие их от управляющих мини-ЭВМ микроЭВМ:
проблемно-ориентированное программное обеспечение на конкретную задачу или набор задач;
схожесть физической структуры ПМК различных назначений;
программирование ПМК в процессе их изготовления, а возможное изменение программы работы, настройка, реконфигурация и т.п. осуществляются на пульте оператора клавишами, перемычками, как в обычных аналоговых устройствах автоматики;
ПМК предназначены для эксплуатации в непосредственной близости от технологического оборудования, поэтому в ПМК обеспечиваются необходимая защита от промышленных помех, гальваническая развязка от внешних цепей оптронами (оптоэлектронный прибор, позволяющий передавать информацию с помощью оптической среды), ферритовыми трансформаторами;
модульная структура ПМК, позволяющая наращивать память ПМК, изменять число входов и выходов и т.п.;
меньший объем памяти и меньшее число электронных блоков в составе ПМК по сравнению с микроЭВМ;
наличие сканирующих (коммутирующих) устройств для поочередного опроса входов и выходов ПМК.
К настоящему времени промышленностью выпускается ряд серий
ремиконтов (Р-100, Р-110, Р-112, Р-120, Р-122, Р-130, РК-131, КР-300).
Эти контроллеры предназначены для построения многоканальных систем регулирования с выполнением функций стабилизации, экстремального и многосвязанного регулирования. Требуемый алгоритм регулирования, его параметры, связи с внешней аппаратурой набираются оператором с помощью клавиатуры, снабженной общепринятыми в практике автоматизации терминами и символами. Представление информации оператору производится при помощи светодиодных и цифровых индикаторов.
Например, Р-122 имеет до 64 аналоговых и 126 дискретных входов. На выходах формируются аналоговые и дискретные команды сигнализации и управления стандартными исполнительными механизмами. Программная реализация типового состава функций
652
включает 45 алгоритмов регулирования и логического управления, например аналоговый и импульсный ПИД-законы регулирования, автоподстройки, программное задание, нелинейные преобразования, булевые функции и др. На одном приборе Р-122 можно реализовать автоматическое регулирование, эквивалентное регулированию 8÷16 локальными аналоговыми регуляторами, габариты каждого из которых близки габаритам контроллера Р-110.
В комплекс ПМК серий 110 и 120 входят также диалоговые дисплейные контроллеры «Димиконт Д-120» – многофункциональный пульт управления оператора, который может обслуживать системы автоматического регулирования, содержащие до восьми ремиконтов. Назначение его – для конфигурирования ремиконтов, регистрации реальной конфигурации ремиконтов, для информационного обеспечения динамической наладки контуров регулирования, контроля и регистрации параметров технологического процесса, оперативного управления процессом.
Контроллеры РК-131 ориентированы на решение задач автоматизации технологических объектов различной сложности и обеспечивают регулирование, логическое управление, сбор информации, регистрацию и архивацию. Контроллер КР-300 серии КОНТРАСТ (контроллеры для распределенных систем автоматизации технологических процессов) разработан на основе опыта производства и эксплуатации контроллеров Р-110, Л-110, Р-130, РК-131/300 и с применением современных электронных компонентов ведущих зарубежных производителей. Отличается высокой надежностью и низкой стоимостью.
Основы устройства и принципа действия ремиконта.
Особенностью ремиконта является внутреннее программное обеспечение,
не требующее внешних программных средств – операционных систем, транслятора, ассемблера и т.п. Другой важной особенностью ремиконта является программная реализация типового состава функций для систем автоматического управления локального уровня и подсистем АСУ ТП.
Типовой состав функций ремиконта включает 25 алгоритмов регулирования: аналоговые и импульсивные стандартные ПИД-алгоритмы, ПИД-алгоритмы с нуль-органом, с дифференцированием, с автоподстройкой; динамические преобразователи (дифференцирование, интегрирование, слежение, программное задание); нелинейные преобразования (формирование кусочно-линейных функций, булевых функций, селектирование) и другие функции. Физическая структура ремиконта изображена на рис. 2.18.
Микропроцессорный вычислитель ремиконта состоит из центрального процессора (ЦП), памяти программ – полупроводниковых
653
ПЗУ 8.1 и ПЗУ 8.2 (функциональные задачи ремиконта) и памяти данных ОЗУ 1 и ОЗУ 2.
Первая область памяти данных ОЗУ 1 используется для временного хранения промежуточных данных и вычислений, вторая – ОЗУ 2 – содержит программируемые параметры ремиконта.
Для сохранения информации при отключении питания (не менее 200 ч) ОЗУ 2 содержит резервный источник питания.
Память программ ПЗУ 8.1 и ПЗУ 8.2 представляет собой полупроводниковые ПЗУ с неизменяемой и неразрушаемой информацией, «защитой» на заводе-изготовителе.
Средства ввода-вывода информации ремиконта включают АЦП (до четырех блоков) на 16 аналоговых входов каждый; дискретно-цифровой преобразователь ДЦП (до восьми блоков) на 16 дискретных входов каждый; ЦАП (до восьми блоков) на 8 аналоговых выходов каждый; цифро-импульсный преобразователь (ЦИП) на 8 импульсных выходов; цифро-дискретный преобразователь (ЦДП) (до восьми блоков) на 8 дискретных выходов каждый. Для гальванического разделения входных и выходных аналоговых цепей в ремиконте используются гальванические разделители РГ1 и РГ2, благодаря которым подавляются промышленные помехи и ремиконт может работать с источниками и приемниками, находящимися под различными потенциалами по отношению друг к другу и к общему проводу ремиконта.
Средства связи с оператором в ремиконте включают в свой состав панель оператора (ПО), подключаемую к внутрисистемной магистрали через умощнитель магистрали (УМ2), модуль индикации (МИн), модуль сигнализации отказа (МСО) и память ПЗУ 8.3. Панель оператора может отстоять от ремиконта на расстоянии до 3 м и служит средством общения оператора как с программным обеспечением ремиконта, так и с координирующей УВМ верхнего уровня АСУ ТП через устройства внешней интерфейсной связи (блок сопряжения).
654

Рис. 2.18. Физическая структура ремиконта
В постоянном запоминающем устройстве ПЗУ 8.3 хранятся программы обслуживания (ПО), программы тестирования и самодиагностики. Модуль МСО (светодиодные индикаторы) сигнализирует о неисправности блока питания стабилизированного (БПС), резервного питания (БРП), а также об ошибках при выполнении программ. Модуль МИн обеспечивает контроль дискретных входных и выходных сигналов. Блок сопряжения включает в себя модуль связи с кассетным накопителем (МКН), модуль интерфейса СМ ЭВМ ИРПС (МПС) и модуль интерфейса СМ ЭВМ ИРПР (МПР). Устройства внешней интерфейсной связи позволяют включать ремиконт в распределенную АСУ ТП.
Модель «Ремиконт Р-100» позволяет реализовать следующие технические характеристики:
Число входов:
аналоговых……………….…………………………………………………до 64 дискретных……………………...…………………………………………до 126
Число выходов:
аналоговых……………….…………………………………………………до 64 импульсных..…………….…………………………………………………до 64 аналоговых……………….…………..……………………………………до 126
Входные и выходные аналоговые сигналы…………………………………0-5;0-20 4-20 мА 0-10 В
Входные дискретные сигналы, В:
логический «0»…….…….……………………………………………………0-3 логическая «1»…….…….…………………………………………………18-30
655
Выходные дискретные и импульсные сигналы (состояние контактов):
логический «0»…….…….…………………………………………разомкнутое логическая «1»…….…….……………………………………………замкнутое Время цикла, с……………………………………………………………..0,27-1-2,04
Точность установки сигнала задания, %………………………………...…...…...0,1
Статическая точность стабилизации, %..............................…………………...0…0,2
Способность ремиконта к реконфигурации и созданию канала регулирования с нужными динамическими свойствами (так называемая «виртуальность» структуры) является еще одной особенностью ремиконта и программируемых микропроцессорных контроллеров вообще.
Пример возможной виртуальной структуры восьмиканального варианта ремиконта показан на рис. 2.19.
Такая конфигурация ремиконта имеет 16 аналоговых и 32 дискретных входов, 8 аналоговых и 16 дискретных выходов. Структура управления содержит 8 каналов с восьмью входами в каждый канал, библиотеки алгоритмов и блок коэффициентов (параметров настройки). Ремиконт имеет жесткосвязанные выходы каналов с выходами контроллера. Остальные связи по входам устанавливаются в произвольном сочетании с панели оператора.
656
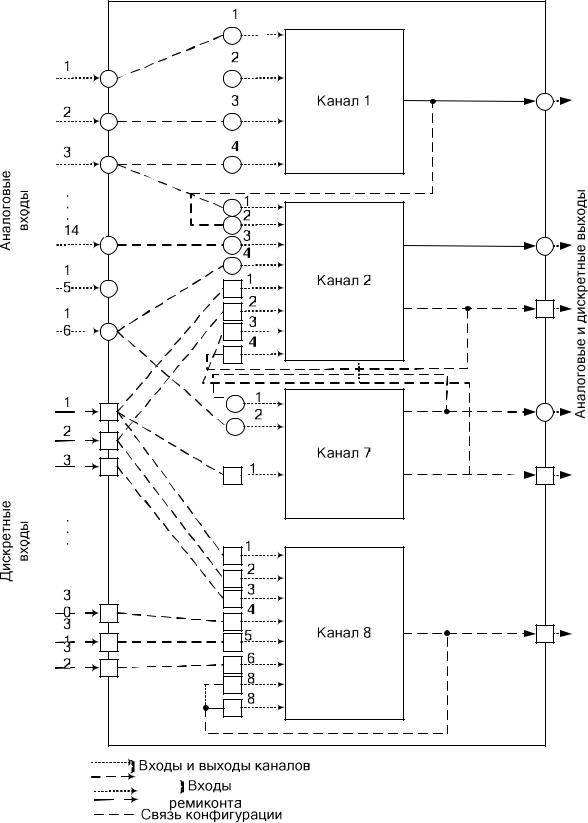
Рис. 2.19. Пример виртуальной структуры ремиконта
657
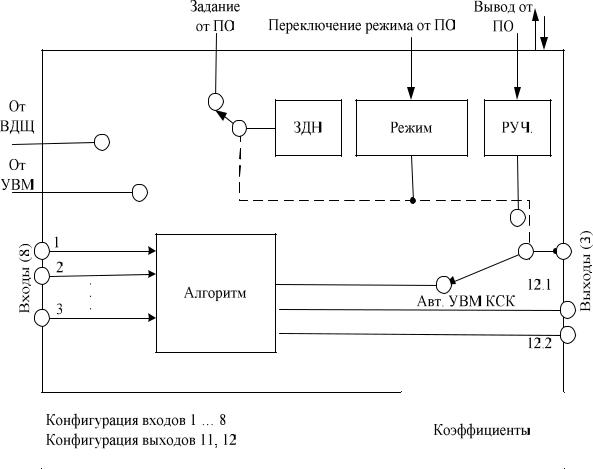
Алгоритмическое обеспечение ремиконта оформлено в виде библиотеки алгоблоков, из которых потребитель выбирает интересующие его блоки.
На рис. 2.20 изображена функциональная структура алгоблока. Каждый алгоблок имеет восемь входов и три выхода (один аналоговый и два дискретных). Также показаны возможные коммутации на панели оператора ПО: АВТ – автоматическое управление через узел задания ЗДН, от ведущего алгоблока (ВДЩ) при каскадном регулировании (КСК), от УВМ при супервизорном управлении, ручное управление РУЧ с панели оператора.
Всекцию алгоритма помещается один из алгоритмов управления (библиотека алгоритмов ремиконта содержит 25 алгоритмов).
Всекции конфигурации размещается информация, указывающая на элементы виртуальной структуры, с которыми соединяются входы и выходы алгоблока.
Секция коэффициентов алгоблоков содержит коэффициенты статической и динамической настройки.
Рис. 2.20. Состав алгоблока ремиконта (пример) |
658
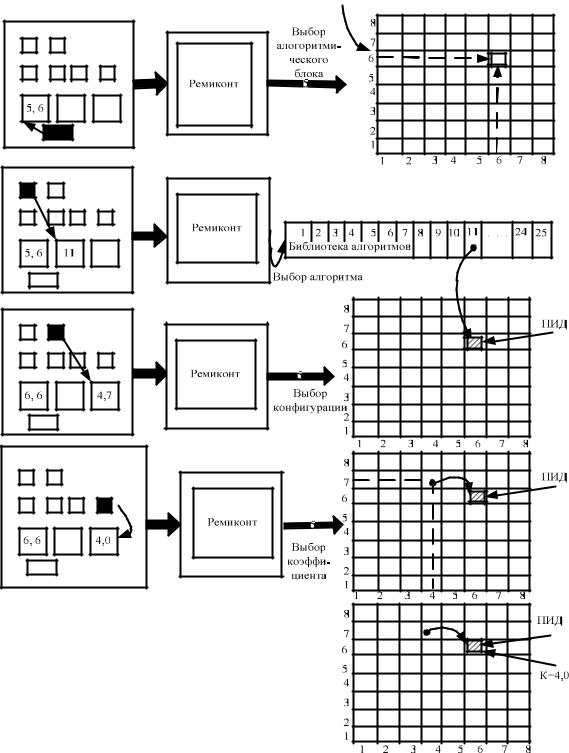
Пример применения ремиконта [47]. В целом применение ремиконта экономически целесообразно в АСР с большим числом каналов регулирования (6÷8 и более).
Рис. 2.21. Схема программирования ремиконта: 1,2,3,4 – последовательные операции формирования системы регулирования с помощью пульта
659