

2205
.pdfРис. 14. Окно настройки параметров блока Bushing
15. Блок Custom Joint (наборное сочленение) занимает особое положение. В отличие от всех прочих блоков, он позволяет пользователю самому установить число и порядок примитивов (и степеней свободы) в шарнире, то есть сконструировать собственную цепь примитивов. Число степеней свободы не может быть больше максимально возможного – шести. При конструировании доступны все описанные выше примитивы типа P (Prismatic), R (Revolute) и S (Spherical). Использование S-типа влечет уже упомянутые ограничения по принудительному возбуждению движения.
1.2.1. Разобранные шарниры Disassembled Joints
Подраздел разобранных шарниров Disassembled Joints (рис. 15) содержит набор шарниров, которые SimMechanics автоматически собирает в начале моделирования. То есть SimMechanics в начале мо-
20
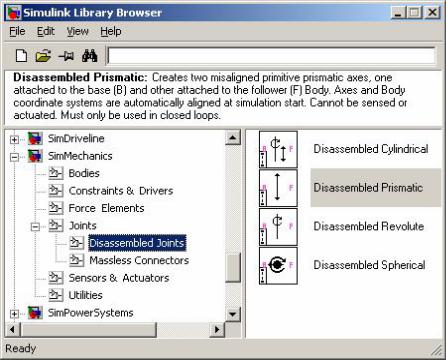
делирования позиционирует эти шарниры таким образом, чтобы они удовлетворяли сборочным ограничениям, определяемым типом шарнира, например, поступательным (Prismatic) или вращательным
(Revolute).
Использование этих шарниров устраняет необходимость для пользователя сборки закрытых контуров в механизме (ручной подгонки линейных и угловых размеров в цепи звеньев с закрытой топологией).
Рис. 15. Блоки разобранных шарнирных сочленений
Disassembled Joints
Разобранных шарниров всего четыре типа: 1) Disassembled Prismatic; 2) Disassembled Revolute; 3) Disassembled Cylindrical; 4) Disassembled Spherical.
Разобранные элементарные шарниры отличаются от аналогичных собранных шарниров числом задаваемых осей. Собранный элементарный примитив имеет только одну ось поступательного движения, или одну ось вращения, или одну сферическую точку. Разобранный поступательный или вращательный примитив имеет две оси поступательного движения или вращения: одну для тела-базы (Base) и другую для тела-последователя (Follower). Разобранный сферический примитив также имеет две точки.
21
Все разобранные шарниры могут использоваться только в закрытых контурах механизма (при их наличии). Каждый закрытый контур может содержать только один разобранный шарнир.
Перед запуском моделирования SimMechanics осуществляет сборку механизма и может перемещать тела, связанные разобранными шарнирами, из их позиций, чтобы собрать эти шарниры. Решение проблемы сборки SimMechanics не может быть предсказано заранее за исключением простых случаев. Чтобы запретить SimMechanics передвигать тела в процессе сборки, необходимо использовать блоки начальных условий шарниров Joint Initial Condition, описанные далее, в которых определяется начальное положение тел, зафиксированное во время сборки. Это заставит SimMechanics найти такое решение сборки, которое удовлетворяет начальным перемещениям шарниров, заданным при помощи блоков Joint Initial Condition.
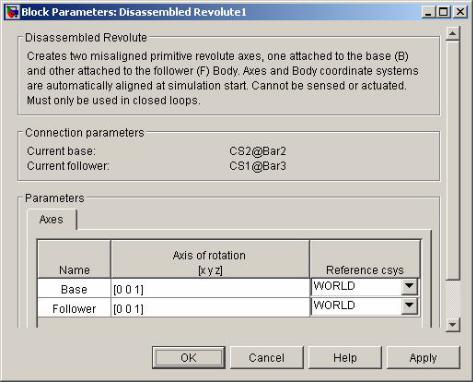
Рис. 16. Настройка параметров блока Disassembled Revolute
Окно настройки разобранного шарнира (рис. 16) позволяет задать направление каждой оси. Как правило, эти направления будут совпадать.
22
Разобранный шарнир
Disassembled Revolute
а) |
б) |
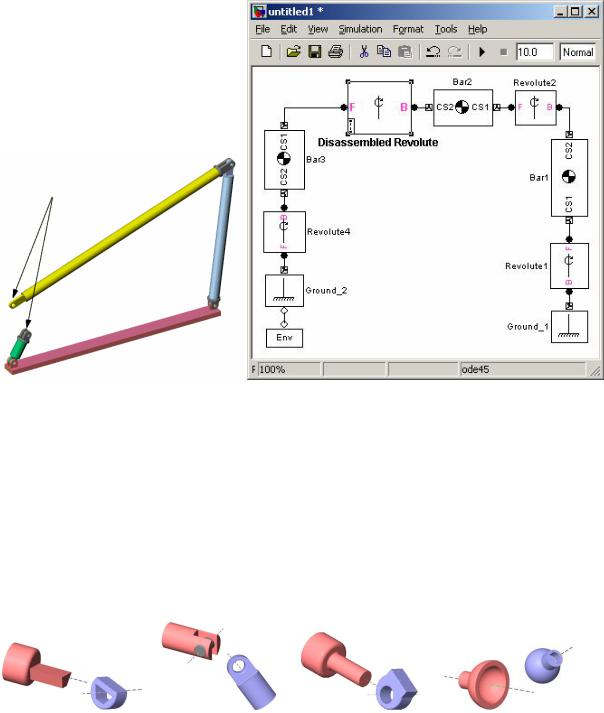
Рис. 17. Эскиз четырехзвенного механизма, образующего закрытый контур (а) и его SimMechanics модель с использованием разобранного шарнира
Disassembled Revolute (б)
Пример закрытого контура, в котором может быть применен разобранный шарнир Disassembled Revolute, приведен на рис. 17. Эскизы разобранных шарниров, поясняющие их назначение, приведены на рис. 18.
а) |
б) |
в) |
г) |
Рис. 18. Эскизы разобранных шарниров: а) Disassembled Prismatic;
б) Disassembled Revolute; в) Disassembled Cylindrical; г) Disassembled Spherical
23

1.2.2. Безынерционные соединители Massless Connectors
Безынерционные соединители Massless Connectors (рис. 19) упрощают моделирование машин и механизмов, которые используют очень легкое тело для того, чтобы соединить два сравнительно массивных тела. В этом случае можно было бы использовать блок Body, чтобы моделировать такое соединение. Но результирующие уравнения движения, автоматически составляемые Simulink, могут при этом быть некорректными, поскольку масса соединительного тела небольшая, и моделирование вследствие этого может быть медленным или с большой погрешностью.
Каждый безынерционный соединитель Massless Connectors является эквивалентом двум шарнирам, чьи соответствующие оси пространственно разделены фиксированным расстоянием. Возможно задание как расстояния между осями (неявно), так и различного направления осей. Пространство между двумя примитивами считается соединенным жестким стержнем нулевой массы. Виртуальные датчики типа Sensor или возбудители движения типа Actuator не могут быть подключены к блокам Massless Connectors.
Рис. 19. Блоки безынерционных соединителей
Massless Connectors
Безынерционных соединителей всего три типа: 1) RevoluteRevolute; 2) Revolute-Spherical; 3) Spherical-Spherical.
24
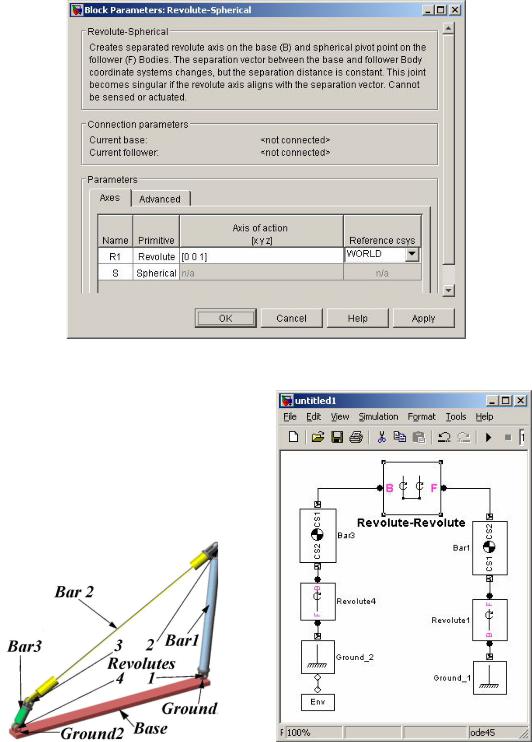
Окно настройки безынерционного соединителя (рис. 20) позволяет задать направление каждой оси вращательного R-примитива.
Рис. 20. Настройка параметров блока Revolute-Spherical
а) |
б) |
Рис. 21. Эскиз четырехзвенного механизма с звеном Bar 2 нулевой массы (а) и его SimMechanics модель с использованием безынерционного соединителя
Revolute-Revolute (б)
25

На примере уже рассматриваемого ранее четырехзвенного механизма покажем возможность применения безынерционного соединителя Revolute-Revolute. Пусть тело Bar 2 на рис. 21, а имеет очень малую массу, и его необходимо описать в модели как безынерционный соединитель.
Тогда модель SimMechanics данного механизма должна выглядеть примерно так, как это изображено на рис. 21, б. Если сравнить данную модель с моделью, изображенной на рис. 17, б, то видно, что один блок безынерционного соединителя Revolute-Revolute заменяет собой сразу три блока: два бока вращательных шарниров и блок тела
Body.
а) |
б) |
в) |
Рис. 22. Эскизы безынерционных соединителей: а) Revolute-Revolute;
б) Revolute-Spherical; в) Spherical-Spherical
Эскизы безынерционных соединителей, поясняющие их назначение, приведены на рис. 22.
1.3.Блоки связи механических блоков SimMechanics
собычными S-блоками Simulink (виртуальные регистраторы и возбудители движения Sensors & Actuators)
Для того, чтобы можно было измерить относительные движения тел при моделировании машин и механизмов, а также сообщить звеньям механизмов относительные движения, недостаточно блоков тел из раздела Bodies и блоков шарниров из раздела Joints. Эти блоки описывают только структуру механизма, но не сообщают ему никаких движений. Следовательно, необходимо подключение к данным блокам других, моделирующих какие-либо воздействия и снимающих показания.
Однако подключение механических блоков SimMechanics из разделов Bodies и Joints к обычным S-блокам Simulink (таким, например, как источники сигналов Sources или регистраторы Sinks) возможно только через специальные связующие блоки механических
26
виртуальных регистраторов тел и шарниров (Sensors) и возбудителей тел и шарниров (Actuators).
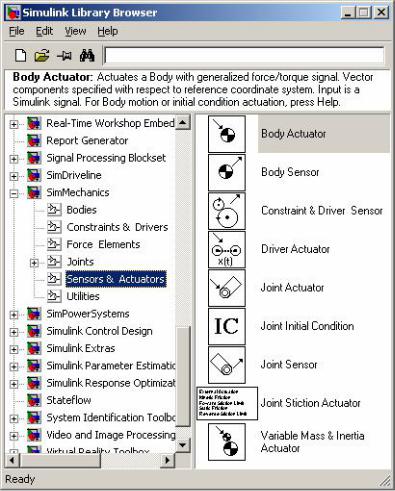
Рис. 23. Блоки виртуальных регистраторов и возбудителей движения Sensors & Actuators
Причины для этого следующие. Входы (и они же одновременно выходы) механических блоков тел и шарниров служат для двухсторонней передачи силовых взаимодействий между звеньями механизма, которые имеют место при пространственных движениях твердых тел согласно законам классической механики. Однако обычные S- блоки Simulink являются либо источниками, либо получателями, либо преобразователями однонаправленных сигналов, и поэтому не могут быть непосредственно подсоединены к входам/выходам механических блоков. Не случайно в блок-схемах SimMechanics на линиях соединения механических блоков нет изображений стрелок, указывающих направление воздействия, а графические изображения «вхо-
27
дов/выходов» механических блоков имеют вид не стрелок, а квадратов с диагоналями.
Как уже было отмечено ранее, блоки типа Body и Joint, а также описанные ниже блоки из раздела Constraints & Drivers могут быть снабжены дополнительными портами для подсоединения к ним блоков Actuator и Sensor. Благодаря этому, становится возможным использовать все остальные библиотеки Simulink для формирования сигналов и перевода получаемой информации обратно в рабочее пространство Simulink.
Все девять блоков раздела Sensors & Actuators (рис. 23) можно разделить на три группы по типу блоков, к которым они подключаются.
Группа 1. Блоки измерителей и возбудителей движения тел: 1.1. Body Actuator; 1.2. Body Sensor; 1.3. Variable Mass & Inertia Actuator.
Группа 2. Блоки измерителей и возбудителей движения шарнир-
ных сочленений: 2.1. Joint Actuator; 2.2. Joint Sensor; 2.3. Joint Initial Condition; 2.4. Joint Stiction Actuator.
Группа 3. Блоки измерителей и возбудителей движения ограни-
чителей и нестационарных связей: 3.1. Driver Actuator; 3.2. Constraint & Driver Sensor.
Рассмотрим особенности использования блоков по группам. Для группы 1 возбуждение движения или снятие информации
происходит в той точке тела, к порту которой присоединен соответствующий блок раздела Sensors & Actuators. Координаты точки должны быть предварительно заданы в окне настройки блока Body.
1.1. Блок Body Actuator задает возбуждающую силу и/или момент, прикладываемые в точке тела, куда подсоединен данный блок.
Вкачестве параметров блока выступают (рис. 24):
-поле выбора системы координат, в которой задается воздейст-
вие Using reference coordinate system (сила или момент могут быть заданы в абсолютной World или локальной Body CS системах координат, используется выпадающий список);
-поля простановки флажков для выбора приложения усилия и/или момента Apply force, Apply torque;
-единицы измерения усилия/момента.
Само значение компонент вектора усилия (и/или момента) должно подаваться в виде векторного сигнала (вида [X; Y; Z] для усилия)
28
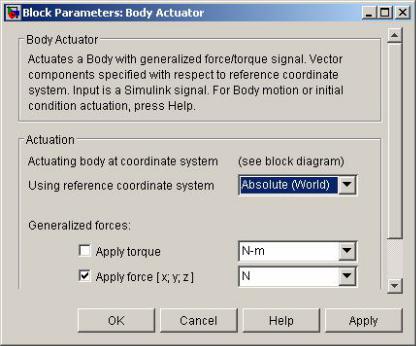
на вход блока Body Actuator, для чего могут быть использованы обычные S-блоки Simulink.
Рис. 24. Настройка параметров блока Body Actuator
1.2. Блок Body Sensor позволяет в общем случае измерить следующие характеристики движения точки тела, к порту которой он присоединен:
-координаты (Position) [X; Y; Z] – вектор текущих значений абсолютных координат точки тела;
-скорость (Velocity) [X′; Y′; Z′] – вектор проекций абсолютной скорости точки тела;
-угловую скорость (Angular velocity) [θX′; θY′; θZ′] – вектор про-
екций абсолютной угловой скорости тела;
-[3 3] Rotation matrix – матрицу направляющих косинусов углового положения тела;
-ускорение (Acceleration) [X″; Y″; Z″] – вектор проекций абсолютного ускорения точки тела;
-угловое ускорение (Angular acceleration) [θX″; θY″; θZ″] – век-
тор проекций абсолютного углового ускорения тела.
Выбор измеряемых параметров осуществляется простановкой флажков в соответствующих полях окна настройки блока (рис. 25). Все измеряемые параметры могут быть объединены на выходе в
29