

1466
.pdf
|
0 |
( ) |
|
4 m |
2 |
|
||
|
|
|
|
г |
|
. |
(4.66) |
|
| A(i )| |
|
|
||||||
|
|
|
|
|||||
Левая часть равенства (4.66) характеризует амплитуду G0 гармонической возмущающей силы. Таким образом, если G0( )= mA 2, т.е. возбуждение колебаний вызвано разгоном или торможением вращающейся неуравновешенной массы mА, установленной с эксцентриситетом , то подобрав параметры гасителя из условия
mг =( /4) mA, (4.67)
можно обеспечить подавление колебаний в широком частотном диапазоне существования режима с поочередными ударами об ограничители /1/.
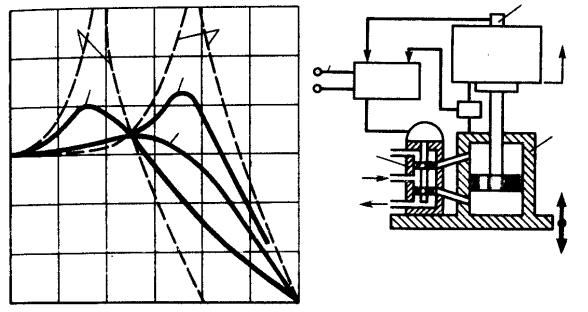
На рис. 4.34 показаны
амплитудно-частотные |
|a|/ |
|
|
|||
характеристики |
системы с |
r=0,2 |
|
|||
|
с |
|||||
одной |
степенью |
свободы, |
13 |
|
|
|
снабженной |
пружинным |
|
|
|||
ударным |
|
гасителем |
11 |
|
mг |
|
одностороннего |
действия. |
|
сг |
|||
Система |
возбуждается |
9 |
r=0,6 |
|
||
гармонической |
|
силой |
|
|||
|
|
|
|
|||
постоянной амплитуды. При |
7 |
|
|
|||
этом |
выполнены |
условия |
5 |
|
|
|
наиболее |
эффективной |
r=0,8 |
|
|||
настройки /13/: |
|
|
3 |
|
||
|
|
|
|
|
|
|
2
 cг /mг
cг /mг 
 с/m. (4.68)
с/m. (4.68)
При |
2 cг /mг |
гашение оказывается наилучшим. При настройке зазора обычно принимают
0 /1/.
0,85 0,95 1,05
Рис. 4.34. Амплитудно-частотные характеристики системы с одной степенью свободы, снабженной пружинным ударным гасителем одностороннего действия /11/
4.8. Активные виброзащитные системы
Использование в системах динамического гашения колебаний элементов с собственными источниками энергии расширяет их функциональные свойства. Появляется возможность достаточно просто и в широком диапазоне осуществлять подстройку параметров гасителя в связи

с изменением действующих возмущений, производить непрерывную настройку в режиме слежения, отыскивать и реализовывать наилучшие законы для компенсирующих реакций /1/.
При гашении моногармонических колебаний активные элементы могут быть применены для регулирования параметров гасителя колебаний при медленных изменениях частоты возбуждения с целью обеспечения равенства парциальной частоты гасителя и частоты возмущающего воздействия /1/.
В настоящее время разработано большое количество схем активных гасителей колебаний. На рис. 4.35 представлена схема управляемого электродинамического гасителя, в которой изменение параметров колебательной системы достигается в результате управления электронными элементами, что позволяет применять эту схему для гашения колебательной системы, работающей в переходных режимах. Здесь колеблющийся агрегат массы М опирается на упругие связи жесткости с и на магнитоэлектрические преобразователи (динамики 5 и 6). Датчик перемещений 1, соединенный с колеблющейся массой, передает сигнал х(t) на усилитель 2 и дальше на дифференцирующее устройство 3 и усилитель 4, питающий магнитоэлектрические преобразователи. Эти
|
|
P0sin t |
|
F(x) |
M |
F(x) |
|
|
c |
c |
|
5 |
1 |
6 |
|
2 |
|||
|
|
||
|
3 |
|
4
u=u(x)
Рис. 4.35. Электродинамический гаситель колебаний
8 x(t)
2 |
6 |
|
1
7
4
5
P0sin t
Рис. 4.36. Пневмомеханический гаситель колебаний
элементы образуют петлю электромеханической обратной связи. Меняя параметры петли, можно изменять параметры схемы, а следовательно, изменять ее резонансные свойства в широких пределах /1/.
На рис. 4.36 показана схема пневмомеханического гасителя с пневматическим возбудителем (силовым цилиндром) двойного действия (1
– пневмомеханический возбудитель; 2 – механическая обратная связь по смещению; 3 – сервоклапан; 4 – входной канал; 5 – выходной канал; 6 – дроссель; 7 – емкость; 8 – изолируемый объект) /11/.
Механическая обратная связь по смещению через золотниковое устройство управляет расходом газа, подаваемого внешним источником энергии. Вследствие наличия обратной связи по смещению, перемещающей золотник, выходное усилие возбудителя является функцией интеграла относительного смещения. Управление по интегралу от смещения может быть эффективным только на очень низких частотах, поэтому обратная связь по смещению используется лишь для позиционирования защищаемого объекта. Качество же защиты от колебаний определяется жесткостью и демпфированием пассивной пневматической системы. Система сравнительно мало чувствительна к изменению величины изолируемой массы
/1/.
Зависимость коэффициента динамичности kд по смещению от частотыдля пневмомеханического гасителя колебаний с вспомогательными емкостями показана на рис. 4.37 в логарифмическом масштабе. Кривая 1 – при нулевом, 2 – бесконечном, 3 – низком, 4 – высоком, 5 – оптимальном демпфировании. Кривые 3 и 4 получаются при отсутствии дросселирования и при полном перекрытии потока газа между возбудителем и дополнительными емкостями. Оптимальное демпфирование определяется минимизацией резонансного коэффициента динамичности. Довольно большие отклонения демпфирования от оптимального значения мало влияют на kд /1/.
kд |
1 |
2 |
|
1 |
|
|
|
||
|
|
|
|
x(t) |
|
|
4 |
4 |
M |
|
|
|
|
|
|
|
3 |
|
3 |
|
|
|
|
|
|
|
5 |
|
2 |
|
|
|
8 |
|
|
|
|
|
|
1,0 |
|
|
|
5 |
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
P0sin t |
0,1 |
|
|
|
|
|
|
|
|
|
|
Рис. 4.37. Зависимость коэффициента kд |
|
Рис. 4.38. Электрогидравлический |
|
|
по смещению от частоты |
|
гаситель колебаний |
|
На рис. 4.38 приведена схема электрогидравлического гасителя с силовым цилиндром двойного действия (1 – датчик ускорения; 2 – датчик относительного смещения; 3 – сервоусилитель; 4 – электропитание; 5 – сервозолотник; 6 – входной канал; 7 – выходной канал; 8 – гидравлический возбудитель). В этой схеме сигналы от датчиков ускорения и относительного смещения подаются в усилитель с электрическим питанием. Усилитель вырабатывает сигнал, управляющий движением золотника, который регулирует подачу (от внешнего гидравлического источника энергии) и слив рабочей жидкости из силового цилиндра. Поток рабочей жидкости через золотник регулируется по ускорению, относительной скорости, относительному смещению и интегралу относительного смещения. Коэффициенты усиления по каждому каналу обратной связи настраиваются независимо /1/.
|
Библиографический список |
|
|
1. Васильев Ю.М., |
Готлиб Я.Г., |
Филатов А.Е. |
Нормирование |
производственных вибраций в СССР и за рубежом. – М.: Машиностроение, 1976. – 20 с.
2.Вибрация в технике: Справочник: В 6 т. Защита от вибрации и ударов /Под ред. К.В. Фролова. - М.: Машиностроение, 1981. – Т.6. – 456 с.
3.Вибрация в технике: Справочник. В 6 т. Колебания машин, конструкций и их элементов/Под ред. Ф.М. Диментберга и К.С. Колесникова. – М.: Машиностроение, 1980. –Т.3. – 544 с.
4.ГОСТ 12.1.012–90. Система стандартов безопасности труда. Вибрационная безопасность. Общие требования.
5.ГОСТ 22061–76. Система классов точности балансировки.
6.ГОСТ 25980–83. Вибрация. Средства защиты. Номенклатура параметров.
7.ГОСТ 26568–85. Вибрация. Методы и средства защиты. Классификация
8.Иванов Н.И. Борьба с шумом и вибрациями на путевых и строительных машинах. – М.: Транспорт, 1987. – 223 с.
9.Колесников А.Е. Шум и вибрация. – Л.: Судостроение, 1988. – 247 с.
10.Левитская О.Н., Левитский Н.И. Курс теории механизмов и машин. М.: Высшая школа, 1978. – 269 с.
11.Левитский Н.И. Колебания в механизмах: Учеб. пособие для втузов. – М.:
Наука, Гл. ред. физ.-мат. лит., 1988. – 336 с.
12. Снижение динамических воздействий на одноковшовый экскаватор: Монография / В.С. Щербаков, П.А. Корчагин. – Омск: Изд-во СибАДИ, 2000. – 147 с.
13. Теория механизмов и механика машин: Учеб. для втузов/ К.В. Фролов, С.А. Попов, А.К. Мусатов и др.; Под ред. К.В. Фролова. – М.: Высш. шк., 1998. – 496 с.
Учебное издание
Корчагин Павел Александрович
УРАВНОВЕШИВАНИЕ И ВИБРОЗАЩИТА
Учебное пособие
Главный редактор М.А. Тихонова
Подписано к печати .........…….……............
Формат 60 х 90 1/16. Бумага писчая Оперативный способ печати Гарнитура Times New Roman Cyr Усл. п. л. 4,5, уч.-изд. л. 4,5
Тираж 200 экз. Заказ …….…….............
Цена договорная
Издательство СибАДИ 644099, Омск, ул. П. Некрасова, 10
Отпечатано в ПЦ издательства СибАДИ 644099, Омск, ул. П. Некрасова, 10