

Набор лекций по Выч. математике ч 4
.docxНаиболее часто в САПР используются разновидности метода сеток:
- МКЭ(метод конечных элементов);
- МКР(метод конечных разностей);
Они отличаются на этапах 1 и 2. Третий этап практически совпадает.
МКЭ(метод конечных элементов).
В математическом отношении является вариационно-разностным. Строгое доказательство устойчивости, сходимости, точности – часто непростая проблема для МКЭ. И поэтому нередко применяется без строго математического обоснования, однако правильность подтверждается точными решениями.
Основные преимущества: доступность, простота понимания, применимость для задач с производственной формой области, возможность создания на его основе универсальных программ для ЭВМ.
Алгоритм МКЭ состоит из следующих этапов
-
Разбиение области на элементы. Элемент – часто треугольник. Разбиение обычно начинают от границы области. Размеры элементов могут отличаться. Затем узлы нумеруются. При нумерации узлов предпочтителен способ, обеспечивающий минимальную разность между номерами узлов в каждом отдельном элементе. Дело тут вот в чем. Мы говорили, что на конечном этапе метода сеток решается система линейных алгебраических уравнений.
Матрица коэффициентов такой системы при применении МКЭ является разреженной, то есть все элементы, кроме близко расположенных к главной диагонали равны нулю. Чем уже ширина L ленты ненулевых элементов, тем меньше нужна _____ для их запоминания и быстрее идет счет. Оказывается L = N+1, где N – максимальная разность между номерами узлов для отдельного элемента.
В случае нашей нумерации N = 14. Можно пронумеровать по другому и получить N = 5. В этом случае сокращается в 3 раза необходимый объем оперативной памяти.
При наличии большого количества элементов (например, нескольких тысяч) задача ручного разбиения и нумерации становится весьма трудоемкой. Поэтому в последнее время стали разрабатываться программы автоматического разбиения и нумерации, которые например минимизируют ширину L.
2) этап. Определение аппроксимирующей функции. Искомая непрерывная функция аппроксимируется кусочно – непрерывной, определенной на множестве конечных элементов. Важным аспектом МКЭ является то, что для элементов одного и того же типа может быть выбрана одна и та же аппроксимирующая функция. Далее она может использоваться в различных краевых задачах, в которых используются элементы данного типа.
Чаще всего в качестве аппроксимирующей функции используются полином(в этом глубокий смысл!- ряд Тейлора). Коэффициенты полинома выражают через узловые значения функции и координаты узлов:
 лучше
лучше
 =
NU
=
NU
Чтобы понять как вводится аппроксимирующая функция и как она используется для выражения искомой функции через ее узловые значения. Рассмотрим два частных случая.
А) – случай. Одномерная область, то есть некоторая искомая функция _ зависит только от одной переменной x. Отметим, что конечной задачей метода МКЭ является определение узловых значений функции _, но для данного этапа будем считать, что узловые значения нам известны.
По длине элемента ( )
значение функции φ аппроксимируем
полином первого порядка
)
значение функции φ аппроксимируем
полином первого порядка
φ =
 (1.19)
(1.19)
Определим
 ,
считая что
,
считая что
 – известны.
– известны.
Учтем, что
φ =
 при x =
при x =

φ =
 при x =
при x =
 (1.20)
(1.20)
Подставив (1.20) в (1.19) получим:

 (1.21)
(1.21)
Отсюда находим:
Подставим теперь найденные выражения
для
 в аппроксимационный полином:
в аппроксимационный полином:
φ =
преобразуем:
φ =
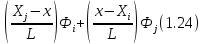
 – называются коэффициентами формы.
– называются коэффициентами формы.
С их учетом имеем

Или в матричной форме:
φ = NФ
где N =

Ф =
Коэффициенты формы обладают свойством: коэффициенты с номером i равны 1 в узле с номером i и равны 0 во всех других узлах.
Б) Двумерный случай. Покажем, что и в этом случае мы приходим к уравнению в матричной форме φ = NФ, которое связывает значение непрерывной функции φ с ее дискретными значениями в узлах сетки. При этом коэффициенты формы N зависят от текущих координат x и у. Если x и у совпадают с координатами узлов мы получаем значение φ в узлах, а если нет, то между узлами.
Полином, аппроксимирующий непрерывную функцию φ элементарного треугольника имеет вид
φ=
Опять полагаем, что
 и переменные x, y.
Для этого опять составим систему
уравнений, в которых слева значения φ
в узлах элемента, а справа подставляем
координаты узлов.
и переменные x, y.
Для этого опять составим систему
уравнений, в которых слева значения φ
в узлах элемента, а справа подставляем
координаты узлов.
Как и ранее находим из этой системы
коэффициенты
 ,
подставляем их в полином аппроксимации
и переходя к коэффициентам формы N
получим:
,
подставляем их в полином аппроксимации
и переходя к коэффициентам формы N
получим:
 ;
φ = NФ (1.29)
;
φ = NФ (1.29)
где



Где S – площадь элемента.



Аналогично могут быть рассчитаны функции для других типов элементов.
3)этап. Объединение конечных элементов в ансамбль.
В результате этого этапа мы приходим к системе уравнений (алгебраических), которая получается если мы рассмотрим одновременно уравнения, полученные для каждого из элементов разбиения. Эта система позволяет при известных узловых значениях искомой функции – получить значение искомой функции в любой точке области.
Эти уравнения нетрудно получить, если мы заменим в уравнениях (1.25) и (1.29) индексы i, j, k на конкретные номера узлов сетки.
Рассмотрим опять одномерный случай. Функция отдельного элемента определена уравнением (1.25). Между номерами узлов каждого элемента и их симв _______ i, j можно написать следующее соответствие.
Элемент 1 i = 1; j = 2;
Элемент 2 i = 2; j = 3;
Элемент 3 i = 3; j = 4;
Элемент 4 i = 4; j = 5;
Элемент 5 i = 5; j = 6;
Подставим эти номера в (1.25) получим:







Естественно, что в выражениях для
 также надо подставить глобальные номера
узлов, например
также надо подставить глобальные номера
узлов, например


Для двумерного случая: Пусть имеем область. Напишем соответствие между глобальными номерами узлов и их обозначениями в элементе i, j, k(против часовой стрелки).
Элемент 1 i = 1; j = 2; k = 4;
Элемент 2 i = 2; j = 5; k = 4;
Элемент 3 i = 2; j = 4; k = 5;
Элемент 4 i = 4; j = 6; k = 5;
Подставляя эти номера в (1.29) получим


 (1.34)
(1.34)

Это сокращенная форма записи системы. В полном расширенном виде эта система имеет вид:




N =
 .
.
В САПР с целью уменьшения объема памяти чаще используют сокращенную форму описания моделей, а именно (1.34). Полная (расширенная) форма имеет преимущества при реализации следующих этапов алгоритма МКЭ.
4) – ый этап. Определение вектора узловых значений функций. Обычно строится некий функционал и находится его минимум. Функционал строится на основе глубокого физического анализа и это не всегда возможно.
1) Пусть такой функционал найден:
F =
-
F =
-
Подставляем сюда аппроксимирующие функции:
 и производные:
и производные:
-
Минимизация по вектору Ф функционала
 (1.17)
(1.17)
-
Суммирование выражений по конечным элементам приводит к системе алгебраических уравнений
KФ = B
-
Найденные узловые значения подставляются в
 ,
после чего значения φ легко вычисляются
в любой точке пространства, в заданной
области.
,
после чего значения φ легко вычисляются
в любой точке пространства, в заданной
области.
Уравнение теплопроводности описывает процесс распространения теплоты в сплошной среде. В общем случае имеет вид:

S – плотность среды,
 -
теплоемкость при постоянном объеме,
F(x,y,z)
– заданная плотность тепловых источников,
λ – коэффициент теплопроводности
численно равен количеству тепла, которое
передается через единицу площади в
единицу времени при разности температур
между теплоносителями в 1 K
= 1 C; α – коэффициент тепло
отдачи – количество тепла в единицу
времени через единицу поверхности при
разности температур между поверхностью
и средой теплоносителей в 1 К.
-
теплоемкость при постоянном объеме,
F(x,y,z)
– заданная плотность тепловых источников,
λ – коэффициент теплопроводности
численно равен количеству тепла, которое
передается через единицу площади в
единицу времени при разности температур
между теплоносителями в 1 K
= 1 C; α – коэффициент тепло
отдачи – количество тепла в единицу
времени через единицу поверхности при
разности температур между поверхностью
и средой теплоносителей в 1 К.
x
= 0 |

x=e |
 + α(T -
+ α(T -
 )
= 0
)
= 0
теплоотдача – теплообмен между теплоносителем и поверхностью твердого тела.
Необходимо рассчитать одномерное
температурное поле в однородном стержне.
S – поперечное сечение.
Конец стержня жестко закреплен и к нему
подводится тепловой поток q
заданной интенсивности. λ – коэффициент
теплопроводности. Даны: α – коэффициент
теплообмена,
 - температура окружающей среды. Вдоль
боковой поверхности стержень
теплоизолирован.
- температура окружающей среды. Вдоль
боковой поверхности стержень
теплоизолирован.
Температура поля в стержне описывается уравнением теплопроводности
 ;
(y =
;
(y =
 )
)
Которое в одномерном приближении и стационарном случае имеет вид
Краевые условия определяются уравнениями
 при x=0 (1.11a)
при x=0 (1.11a)
 при x = L
(1.11б)
при x = L
(1.11б)
Искомое температурное поле – непрерывная функция от x.
В МКЭ стержень разбивается произвольным образом на конечные элементы (неравной длины). На каждом элементе T(x) аппроксимируется некоторой линейной зависимостью.
Узловые значения
 ÷
÷ в общем случае сначала неизвестны и
подлежат определению в МКЭ. После
получения модели в виде φ =
в общем случае сначала неизвестны и
подлежат определению в МКЭ. После
получения модели в виде φ =
 возникает задача определения узловых
значений функций: Ф
возникает задача определения узловых
значений функций: Ф
Для этого используется несколько методов
-
Метод основанный на вариационной постановке задачи.
В этом методе исходя из физического смысла задачи подбирается некоторый функционал, а затем ищется его минимум. Отметим, что не всегда удается такой функционал найти, это не тривиальная процедура.
Найдем функционал для задачи о стержне:
F =
 dS
(1.36)
dS
(1.36)
Для простоты дальнейших вычислений разобъем стержень всего на 2 элемента (в практических случаях этого недостаточно). Тогда
 ;
;
 (1.37)
(1.37)
 представим в виде
представим в виде
F =
 (1.38)
(1.38)
где
 и
и
 -
площади сечений стержня, на которых
заданы, соответственно, граничные
условия (1.11а) и (1.11б).
-
площади сечений стержня, на которых
заданы, соответственно, граничные
условия (1.11а) и (1.11б).
Рассмотрим вычисление слагаемых в (1.38) в отдельности, учитывая разбиение на 2 элемента
 (1.39)
(1.39)
Вычислим производные с учетом (1.37) и (1.24):

 (1.40)
(1.40)
Подставим (1.40) в (1.39) и считая, что d =
=
 получим
получим

 (1.41)
(1.41)
Второе и третье слагаемое в (1.38) вычисляются
просто, так как подинтегральным функциям
соответствуют узловые значения
 и
и
 .(Ведь
.(Ведь
 – площади на границах)
– площади на границах)
 ,
так как здесь T =
,
так как здесь T =

Итак значение функционала F будет равно:
F = 0,5 (1.44)
(1.44)
где

Для минимизации функционала необходимо выполнение условия



или в матричной форме
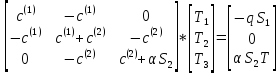 (1.45)
(1.45)
что в общем виде вычисляют так
KT = B – матрица жесткости (пошло из строительной механики)
Зная характеристики материала из системы
(1.45) можно определить узловые значения

Метод Галеркина
Успешно применяется когда не удается подобрать функционала для минимизации (Например для задач с уравнением Навье - Стокка). Основное преимущество, то что его основой служит исходное дифференциальное уравнение.
Метод Галеркина основан на минимизации ошибки ɛ = L(u) – f приближенного решения и исходного дифференциального уравнения Lφ – f = 0, где L – дифференциальный оператор.
Сочетание метода Галеркина с МКЭ приводит
к системе уравнений
 при β = i, j,
k… где L(φ)
– левая часть исходного дифференциального
уравнения, описывающего непрерывную
функцию φ.
при β = i, j,
k… где L(φ)
– левая часть исходного дифференциального
уравнения, описывающего непрерывную
функцию φ.
Ошибки метода конечных элементов.
-
Обычные ошибки округления (сходимость, полнота, согласование);
-
Ошибки дискретизации (из за геометрических различий границы области и ее аппроксимации по методу КЭ);
-
Ошибка пробной или базисной функции(из за разности между точным решением и его представлением пробной функцией).
Ошибки дискретизации могут быть уменьшены за счет уменьшения конечных элементов.
Ошибки пробной функции не обязательно уменьшаются с уменьшением элементов, поэтому могут приводить к расходимости.
Пробная функция только тогда даст точное решение, если аппроксимационный полином имеет ∞ степень, но это невозможно.
Критерий ограниченной сходимости. Условием сходимости является представление в виде полного полинома как минимум степени р , где р – наивысший порядок производной, входящей в функционал.