

_Sistemy_upravleniya_elektroprivodami
.pdfu(t) = U( (t),у*(t),...).
Вкачестве оператора U(•) могут выступать как алгебраические и трансцендентные функции, так и интегро-дифференциальные операторы, булевы функции и пр.
Простейшими алгоритмами управления (регуляторами) являются регуляторы отклонения вида u(t) = U(ε(t)). В практике принято рассматривать три типовых закона регулирования: пропорциональный (П), интегрирующий (И), дифференцирующий (Д). На базе этих законов в регуляторах реализуют более сложные алгоритмы, являющиеся комбинацией основных: пропорционально-интегральный (ПИ), пропорционально-дифферен- циальный (ПД), пропорционально-интегрально-дифференциальный (ПИД)
ит.п.
Врассматриваемой работе подлежат изучению три вида типовых регуляторов, уравнения которых приведены ниже:
1) П – пропорциональный (статический):
|
2) |
И – интегральный ( |
п |
∙ε |
, |
п |
; |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
астатический): |
и⁄ и ; |
|
|||
|
|
|
и |
ε τ |
τ, |
|
|||
|
3) |
ПИ – пропорционально-интегральный (изодромный): |
|||||||
|
|
|
п ∙ε τ ∙ и⁄ |
и |
ε τ τ, |
|
п |
и⁄ и , |
|
где |
, |
– постоянные коэффициенты. |
|
|
|
||||
|
пОценкаи |
свойств регулятора осуществляется на основании статиче- |
|||||||
ских Uвых = f (Uвх) и динамических Uвых = f (t) характеристик, где Uвых – напряжение на выходе регулятора, Uвх – напряжение на входе регулятора.
В системах электропривода в качестве задающего блока очень часто используют задатчики интенсивности. Задатчик интенсивности (ЗИ) представляет собой нелинейное устройство, которое включается в цепь задания регулируемых величин и ограничивает темп (интенсивность) изменения во времени сигнала задания на входе системы. Наиболее широко распространены ЗИ первого порядка, ограничивающие первую производную задающего воздействия по времени.
Математическое описание задатчика интенсивности первого порядка дается в форме неравенств и соответствующих им выражений:
21
|
|
|
|
|
|
|
при |
вх |
вых, |
|
|
|
|
|
|
|
|
|
0 |
при |
вх |
вых, |
|
|
|
|
|
|
|
|
|
|
||||||
где |
|
и |
|
|
|
|
|
вх |
вых |
|
|
|
|
|
– соответственно входной и выходной сигналы задатчика; |
||||||||||
|
|
|
|
|
|
|
при |
|
|
, |
|
|
|
основной параметр задатчика, определяющий темп изменения его вы- |
|||||||||||
А – |
вх |
|
вых |
|
|
|
|
|
|
|
|
|
ходного сигнала. |
|
|
|
|
|
|
||||||
|
Таким образом, при неравенстве входного |
|
и выходного |
сиг- |
||||||||
налов задатчика интенсивности выходной сигнал стремится к входному с |
|
вх |
вых |
определенным темпом А, который является основным параметром задатчика и может регулироваться в процессе настройки системы регулирования.
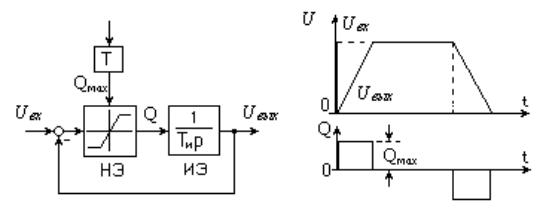
Указанные свойства могут быть приближенно реализованы в рамках структуры, представленной на рис. 2.1.
а) б)
Рис. 2.1. Структурная схема (а) и типичный график работы (б) задатчика интенсивности первого порядка
В данной реализации задатчик представляет собой замкнутую нелинейную систему автоматического регулирования (САР) с регулированием по отклонению. В прямом тракте предусмотрены нелинейный элемент (НЭ) с характеристикой типа «насыщение» и интегрирующий элемент (ИЭ) с постоянной интегрирования Ти.
Принцип действия данного устройства заключается в следующем. При больших рассогласованиях входного и выходного сигналов задатчика нелинейный элемент НЭ находится в состоянии насыщения и его выходной сигнал Q зависит не от величины, а лишь от знака рассогласования:
Q = Qmax sign(Xвх – Xвых).
Благодаря постоянству сигнала Q выходной сигнал интегрирующего элемента ИЭ изменяется во времени по линейному закону. Темп изменения выходного сигнала зависит от параметров задатчика следующим образом:
22

A Qmax ,
Ти
где Qmax – уровень насыщения НЭ; Ти – постоянная интегрирования ИЭ. Отсюда следует, что темп можно регулировать за счет изменения как
Qmax, так и Ти . На рис. 2.1 показан вариант задания значения А путем воздействия на Qmax.
При малых рассогласованиях входного и выходного сигналов нелинейный элемент работает на линейном участке характеристики:
Q = Кнэ(Xвх – Xвых),
где Кнэ – коэффициент усиления НЭ в линейной зоне.
В этом случае темп изменения выходного сигнала ЗИ зависит от рассогласования, причем задатчик интенсивности в целом может быть аппроксимирован апериодическим звеном с передаточной функцией
Физ |
зи |
1 |
, |
|
1 |
|
где Тзи = Ти/Кнэ .
Так как значение Кнэ весьма велико, то при работе ЗИ в линейной зоне его постоянная времени Тзи ничтожно мала.
На основании вышеизложенного можно утверждать следующее. Если темп изменения входного воздействия ЗИ не превышает по модулю установленной для задатчика величины А, то такое воздействие проходит через задатчик без существенных изменений. Если же темп изменения входного воздействия ЗИ превышает величину А, то задатчик трансформирует входное воздействие, ограничивая его первую производную по времени на заданном уровне.
2.2.Программа работы
1.Изучить схему для экспериментального исследования элементов систем управления электроприводов, используемую измерительную и регистрирующую аппаратуру.
2.Снять статические и динамические характеристики задатчика интенсивности.
3.Снять статические и динамические характеристики П-регулятора с блоком ограничения.
4.Снять статические и динамические характеристики И- и ПИрегуляторов.
5.Обработать экспериментальные данные, составить отчет и сделать заключение по работе.
23
2.3.Пояснения к работе
1.В лабораторной работе используются следующие модули:модуль питания стенда (МПС);
модуль регуляторов (MP);модуль ввода/вывода (МВВ).
Все используемые в работе элементы систем управления электро-
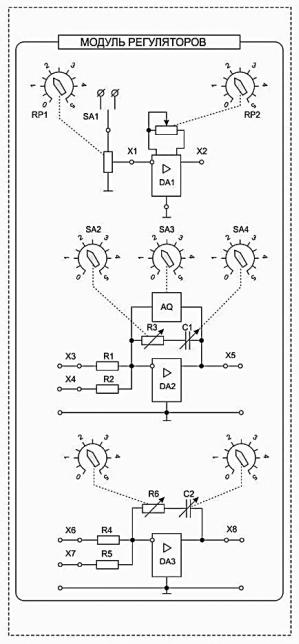
привода располагаются на модуле регуляторов. Лицевая панель модуля регуляторов представлена на рис. 2.2.
Рис. 2.2. Лицевая панель модуля регуляторов
24
На лицевой стороне данного модуля представлены схемы используемых элементов с указанием ручек потенциометров и переключателей, с помощью которых меняются параметры используемых элементов.
Все измерения производятся с помощью персонального компьютера. Для этого на компьютере должно быть загружено ПО «DeltaProfi» и загружена соответствующая работа.
На элементе DA1 реализован задатчик интенсивности (ЗИ). Входное напряжение на ЗИ подается с потенциометра RP1. Потенциометр RP2 задает темп изменения выходного напряжения ЗИ.
На операционном усилителе DA2 реализуется ПИ-регулятор с блоком ограничения выходного напряжения AQ1. На этом же регуляторе при выключенном с помощью переключателя SA4 конденсаторе С1 исследуется П-регулятор, при выключенном с помощью переключателя SA2 резисторе R3 исследуется И- регулятор, при одновременно включенных С1 и R3 исследуется ПИ-регулятор.
Регулятор на базе операционного усилителя DA3 используется для реализации контура регулирования тока в работах по исследованию систем подчиненного регулирования и в данной работе не применяется.
Как таковой сборки схемы в этой работе не предусмотрено. Осциллографирование входных и выходных напряжений элементов осуществляется подключением контрольных точек к аналоговым входам ADC1...ADC4 модуля ввода/вывода. Назначение аналоговых входов поясняется на экране компьютера.
Включение стенда в работу производится включением автомата QF1 модуля питания стенда. При этом получают питание все измерительные и усилительные устройства стенда, используемые в работе.
2. Снятие характеристик задатчика интенсивности Для снятия статической характеристики ЗИ необходимо установить
потенциометр RP2 в крайнее левое положение (минимальная постоянная времени ЗИ), а переключатель SA1 – в левое или правое положение. Изменением уровня входного сигнала с помощью потенциометра RP1 от минимального до максимального положений необходимо фиксировать входное и выходное напряжения ЗИ (входы А1, A3 модуля ввода/вывода). Результаты занести в табл. 2.1 и рассчитать коэффициент передачи задатчика Кзи:
|
вых |
|
Kзи |
|
. |
вх |
||
Полученные значения Кзи также занести в табл. 2.1.
25

Таблица 2.1
Результаты измерений и вычислений
Uвх, В
Uвых, В
Kзи
Для снятия динамических характеристик ЗИ необходимо подключить к входу ЗИ канал А1, а к выходу – канал A3 модуля ввода/вывода. Потенциометр RP2 поставить в крайнее левое положение (минимальная постоянная времени), а потенциометром RP1 задать напряжение на входе
ЗИ Uвх = 4... 10 В.
При включении переключателя SA1 в левое или правое положение зафиксировать переходный процесс на выходе ЗИ. Аналогичным образом выполнить опыт для среднего и крайнего правого положений потенциометра RP2.
3. Исследование П-регулятора с блоком ограничения Исследование П-регулятора проводится на операционном усилителе
DA2 при выведенном в максимум блоке ограничения (переключатель SA3 в положение 5).
Исследование заключается в снятии статической характеристики регулятора при нескольких значениях коэффициента усиления.
Для проведения опыта необходимо:
убрать интегральный канал регулятора (SA4 в положение 0);
задать любой коэффициент усиления переключателем SA2;
задавая сигнал на входе регулятора потенциометром RP1, снять статическую характеристику регулятора (рис. 2.3), занести результаты в табл. 2.2. Сигналы подавать соответственно на входы А1 и А2 модуля ввода/вывода.
Опыт повторить для трех значений коэффициента усиления.
По данным опыта рассчитать коэффициенты усиления для каждого случая, результаты также занести в табл. 2.2.
Таблица 2.2
Результаты измерений и вычислений
Uвх, В
Uвых, В
K
Блок ограничения служит для ограничения выходного сигнала регулятора на установленном уровне.
26
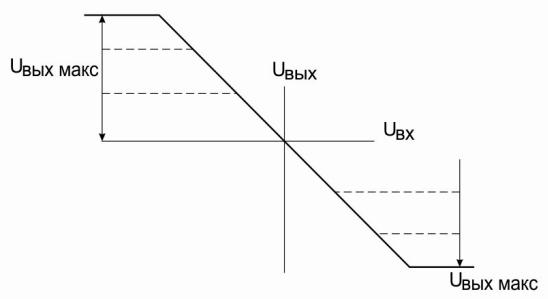
Рис. 2.3. Статическая характеристика пропорционального регулятора
Для исследования блока ограничения необходимо:
установить максимальный коэффициент усиления регулятора;
установить максимальный сигнал задания на входе регулятора;
записав значение напряжения на выходе регулятора, изменить уставку блока ограничения и занести показания в табл. 2.3.
|
|
|
|
|
|
|
|
|
|
Таблица 2.3 |
||
|
|
|
Результаты измерений |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Положение |
0 |
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
4 |
|
4,5 |
5 |
SA3 |
|
|
|
|
|
|
|
|
|
|
|
|
Uвых, В |
|
|
|
|
|
|
|
|
|
|
|
|
4. Исследование И-регулятора и ПИ-регулятора Исследование проводится на том же регуляторе, реализованном на
операционном усилителе DA2.
Собрать схему И - регулятора путем перевода переключателя SA2 в положение «0». Переключатель SA3 установить в положение «5». С помощью переключателя SA4 установить требуемое значение интегрирующей емкости в цепи обратной связи операционного усилителя.
Для исследования влияния емкости на характер переходного процесса выходного сигнала регулятора подключить на выход регулятора канал А2 модуля ввода/вывода.
27
2.4.Порядок проведения опыта
1.На потенциометре RP1 установитьнапряжениевпределах1...3 В;
2.Переключатель SA1 установить в среднее положение;
3.Подключить вход И-регулятора к потенциометру RP1;
4.При включении SA1 в левое или правое положение зафиксировать переходный процесс на выходе И-регулятора. Осциллографирование провести для нескольких выбранных положений переключателя SA4. По полученным осциллограммам экспериментально определить постоянные времени интегрирования.
Для получения ПИ-регулятора переключателем SA2 в цепь обратной связи DA2 последовательно с конденсатором С1 вводится сопротивление резистора R3. Для двух выбранных положений переключателей SA2 и SA4 снять переходную характеристику ПИ-регулятора по методике, использованной при работе с И- регулятором. Экспериментально определить постоянную времени интегрирования и коэффициент пропорциональности.
В отчете должны быть обработаны представляемые осциллограммы
исделаны выводы об их характере и полученных параметрах.
Контрольные вопросы
1.Для чего служит задатчик интенсивности?
2.Чем реализуется темп нарастания напряжения задатчика?
3.Как ограничивается уровень выходного напряжения задатчика?
4.Что такое регулятор и какие функции он выполняет в замкнутой системе управления?
5.Какие существуют схемы ограничения выходного сигнала операционного усилителя? Каковы их принципы действия?
6.Какрасчетнымпутемопределитьпередаточнуюфункциюрегулятора?
7.Как экспериментально определить параметры П-, И-, ПИрегуля-
торов?
8.Почему в разомкнутых контурах регулирования не допускается работа аналогового регулятора в интегрирующем режиме?
28
ЛАБОРАТОРНАЯ РАБОТА № 3. ИЗУЧЕНИЕ ВЛИЯНИЯ ТИПА ОБРАТНОЙ СВЯЗИ
НА СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЗАМКНУТОЙ СИСТЕМЫ
Цель работы: изучить методики настройки систем с суммирующим усилителем; изучить статические и динамические характеристики замкнутой системы тиристорный преобразователь – двигатель при различных типах обратных связей.
3.1.Теоретические сведения
Вкачестве основных контролируемых параметров регулируемого электропривода обычно выступают ток (момент), напряжение (ЭДС), скорость (угол поворота), поэтому именно эти параметры, как правило, используют в виде обратных связей.
Врассматриваемом стенде силовой модуль содержит три типа датчиков обратных связей:
датчик тока типа НХ03-Р;
датчик напряжения типа LV25-P;
импульсный датчик скорости (энкодер) типа TRD-S500VD. Для получения сигнала обратной связи по скорости в аналоговой форме в стенде предусмотрено совместное включение датчика скорости с преобразователем частота-напряжение (ПЧН).
Технические характеристики датчиков обратных связей приведены в табл. 3.1.
|
|
Таблица 3.1 |
|
Технические характеристики датчиков обратных связей |
|||
|
|
|
|
Тип датчика |
Диапазон входных |
Диапазон выходных |
|
параметров |
параметров |
||
|
|||
Датчик напряжения (ДН) |
±0…500 В |
±0…10 В |
|
Датчик тока (ДТ) |
±0…5 А |
±0…10 В |
|
Датчик скорости (ДС) |
±0… 209,3 1/с |
±0…5,5 В |
|
совместно с ПЧН |
|||
|
|
||
Функциональная схема замкнутой системы с суммирующим усилителем при наличии обратной связи того или иного вида может быть представлена в виде, показанном на рис. 3.1.
Конструктивные особенности стенда позволяют организовать замкнутую систему только с одной обратной связью. На рис. 3.1 приведена реализация замкнутой системы с обратной связью по току (выход датчика
29
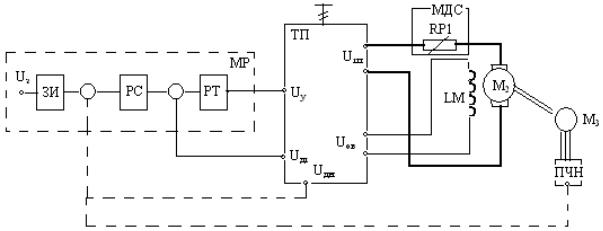
тока соединен сплошной линией со входом регулятора тока, который используется как суммирующий усилитель. Пунктирными линиями показаны соединения выходов датчиков напряжения (Uдн) и датчика скорости (ДС) со входом регулятора скорости, который выступает в роли суммирующего усилителя. Таким образом иллюстрируется возможность реализации замкнутой системы с обратной связью по напряжению или скорости.
Рис. 3.1. Функциональная схема замкнутой системы с суммирующим усилителем
Для системы с обратной связью по току (связь должна быть положительной) при условии, что магнитный поток двигателя постоянен (Фн = const) можно записать следующую систему уравнений:
|
|
|
|
|
з |
|
ост |
∙ |
рт ∙ |
тп |
тп, |
|||
|
|
|
|
|
|
|
ост |
|
дт ∙ |
я, |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
тп |
я ∙ |
яц |
|
|
, |
|
||
|
|
|
|
|
|
|
дв |
|
||||||
где |
– задающее скорость напряжение управления, снимаемое с выхода |
|||||||||||||
задатчиказ |
интенсивности; |
ост |
– напряжение положительной обратной свя- |
|||||||||||
зи по току на входе |
|
|
|
|
|
|
– коэффициент усиления регуля- |
|||||||
|
|
|
регулятора тока; |
|||||||||||
тора тока; |
– коэффициент усиленияртпреобразователя; = πn/30 – угло- |
|||||||||||||
вая скоростьтпякоря двигателя; |
|
– сопротивление якорной цепи двигате- |
||||||||||||
ля; |
– сопротивление датчикаяцтока; |
дв |
– коэффициент передачи двига- |
|||||||||||
теля.дт |
|
|
|
рт |
|
тп |
|
дв |
|
|
|
|
|
|
Коэффициенты |
, |
и |
определяются соответственно по фор- |
|||||||||||
мулам |
|
|
|
|
|
|
∆ |
|
рт⁄∆ |
ост, |
||||
|
|
|
|
рт |
|
∆ рт⁄∆ |
30з |
|
||||||