

КОМБИНИРОВАННЫЕ ЭНЕРГЕТИЧЕСКИЕ УСТАНОВКИ ТРАНСПОРТНЫХ СРЕДСТВ
.pdfВразработке использованы наиболее эффективные способы и средства преобразования электрической энергии в механическую и управления тяговым электродвигателем(ТЭД) в режиме минимальных потерь энергии.
Всостав СТЭО входят:
–обратимая асинхронная электромашина с короткозамкнутым ротором;
–комплект устройств преобразования энергии и управления (КПУ);
–блок аккумуляторных батарей (БАБ).
Технические характеристики ОЭМ в режиме электродвигателя представлены в таблице 3.1 и на рис. 3.20. Установка ОЭМ на автомобиле – на рис. 3.21.
Таблица. 3.1. Технические характеристики ОЭМ
Наименование |
Обозначение, единицы |
измере- |
Значение |
|
ния |
|
|
Мощность (максимальная) |
Nэд, кВт |
|
35 |
Напряжение фазы (максималь- |
Uэд, В |
|
55 |
ное) |
|
|
|
Ток фазы (максимальный) |
Iэд, А |
|
320 |
Число полюсов |
|
|
4 |
Масса |
mэд, кг |
|
100 |
Охлаждение: воздушное, принудительное посредством вентиляторов. ОЭМ оборудована датчиками частоты вращения и температурного режима.
Рис. 3.20. Характеристика ОЭМ в режиме электродвигателя
41

4
2 3
1
Рис. 3.21. Установка ОЭМ на автомобиле. 1 – ОЭМ, 2 – карданный вал привода ОЭМ, 3 – карданный вал привода заднего моста (с промежуточной опорой), 4 – карданный вал привода переднего моста
Комплект устройств преобразования энергии и управления осуществляет преобразование силового постоянного напряжения блока аккумуляторных батарей в трёхфазное переменное регулируемое по частоте и величине напряжение питания ЭД и управление им на -ос новных режимах эксплуатации автомобиля (разгон, движение с установившейся скоростью, электрическое торможение и реверс направления движения).
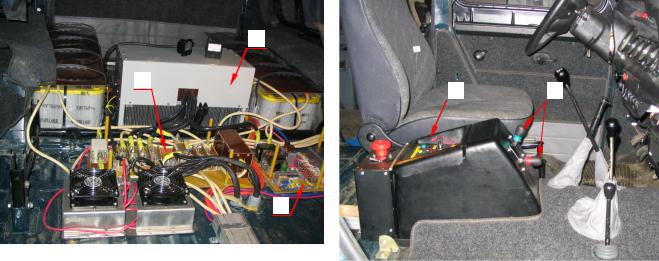
В состав КПУ (рис. 3.22) входят:
1 – блок преобразования энергии и управления (БПУ);
2– блок силовой коммутации (БСК);
3– пульт управления (ПУ);
4– джойстики управления ОЭМ в режиме тяги и торможения(блок управления);
5– распределительная панель;
6– источник служебного напряжения (на рис. 3.22 не показан).
42
1
5
3 |
|
4 |
2
Рис. 3.22. Комплект устройств преобразования энергии и управления.
КПУ обеспечивает:
–подключение к силовому напряжению БАБ и отключение от него;
–включение (выключение) напряжения ТЭД при минимальном токе;
–плавный (по условиям комфорта) вывод ТЭД на заданное тяговое усилие и последующее управление, в соответствии с режимами движения автомобиля;
–автоматическое поддержание заданного тягового усилия в зонах ча- стотно-токового регулирования ТЭД;
–реализацию режима оптимизации потерь мощности в процессе управления тяговым усилием и скоростью ТЭД;
–изменение направления движения при условии полной остановки и отсутствия тока ТЭД;
–электрическое торможение автомобиля путём перевода ТЭД в генераторный режим с плавным управлением тормозным усилием;
–автоматическую защиту компонентов СТЭО:
от перегрузок по току; от коротких замыканий;
от неправильных действий оператора.
Все компоненты КПУ группируются в минимальное количество автономных функциональных блоков, что обеспечивает:
–снижение массы и объёма КПУ;
–возможность конструктивной адаптации КПУ к формам и размерам свободных мест в штатной конструкции автомобиля УАЗ – 3153;
–повышение надежности функциональных блоков и безопасности эксплуатации, а также возможность индивидуального изготовления и отладки конструктивно законченных крупных блоков, поставки их на сборку КПУ и проведения испытаний на комплексном стенде;
–повышение эффективности технического обслуживания и ремонта;
43
–снижение трудовых и материальных затрат на производство и эксплуатацию.
Функциональные блоки КПУ могут быть объединены или размещаться в различных местах автомобиля, создавая тем самым возможность оптимального использования внутренних объёмов автомобиля.
1.Блок преобразования энергии и управленияобъединяет блок силового инвертора и блок автоматического управления(БАУ). Названные компоненты непосредственно реализуют функции преобразования параметров электроэнергии и управления.
По сигналу "Запуск" с ПУ (рис. 3.22) подключается служебное напряжение 24 В на вход блока управления. Напряжение 24 В преобразуется конвертором с электрической развязкой входа и выхода в стабилизированное напряжение для питания функциональных компонентов блока автоматического управления. Силовое напряжение на вход БПУ подается от БСК на предварительный заряд блоков входных конденсаторов через зарядное сопротивление. После заряда блоков входных конденсаторов БПУ подключается непосредственно к напряжению БАБ. Одновременно с этим БАУ передает сигнал"Готов" на ПУ. Таким образом, завершается процедура подготовки блока управления к выполнению рабочих функций.
По команде с ПУ"Направление движения" БПУ принимает соответствующий релейный сигнал, по которому микропроцессорный контроллер (МПК) устанавливает выбранное направление тягового усилия ТЭД. Задание на величину тягового усилия в форме напряжения передается от ПУ и принимается МПК БАУ.
Всоответствии с упомянутым сигналом МПК реализует -про граммно-заданный алгоритм управления силовыми модулями инвертора в результате чего:
–формируется трёхфазное напряжение питания ТЭД;
–реализуется управление его параметрами в соответствии с оптимальным законом частотно-токового управления.
При нейтральном положении задатчика тяги ПУ и соответствующем нулевом сигнале блок управления переходит в режим нулевого тока ТЭД, чем реализуется "свободный выбег" автомобиля без потребления энергии от БАБ.
Перевод блока управления в режим управляемого электрического торможения реализуется задатчиком торможения ПУ, который передает на блок управления сигнал вызывающий изменение алгоритма формирования частоты трёхфазного напряжения инвертора, при ко-
44

тором ТЭД переводится в режим электрического(генераторного) торможения.
2. Блок силовой коммутации предназначен для – подключения силового напряжения постоянного тока к шинам БПУ и бортовому источнику служебного питания напряжением 24 В;
–предварительного заряда входных конденсаторов БПУ;
–автоматического отключения силового питания при нештатных или аварийных ситуациях, сигнал на отключение формируется блоком автоматического управления или с пульта управления.
3. Пульт управления служит для подключения силового и управляющего напряжения, задания реверсивного движения ОЭМ. Кроме того, на нём расположены сигнальные лампы оповещения оператора о состоянии СТЭО.
Реверс направления движения ТЭД достигается путём изменения последовательности напряжений двух фаз. Функции автоматической защиты КПУ реализуются БАУ по признакам:
–превышения максимального тока фазы,
–исчезновения тока в одной из фаз,
–превышения максимально допустимого напряжения на входе -ин вертора,
–перегрева силовых элементов БПУ.
Блок аккумуляторных батарей Технические характеристики БАБ представлены в таблице3.2,
установка БАБ на автомобиле – на рис. 3.23.
Таблица 3.2. Технические характеристики БАБ
Наименование |
Обозначение, единицы измере- |
Значение |
|
ния |
|
Тип – свинцово-кислотные |
|
|
Напряжение: |
|
|
номинальное |
U, В |
120 |
минимальное (при номинальном |
U, В |
80 |
токе нагрузки) |
|
|
Максимальная ёмкость в трехча- |
Eнак, Ач |
50 |
совом режиме разряда |
|
|
Количество аккумуляторов |
шт |
10 |
Масса |
mнак, кг |
190 |
Конструктивное исполнение: необслуживаемые герметичные.
Заряд (подзаряд) – от ОЭМ в генераторном режиме или от внешнего зарядного устройства.
45

Рис. 3.23. Установка блока аккумуляторных батарей на автомобиле
Алгоритм оперативного управления СТЭО.
Алгоритм оперативного управления СТЭО представлен в табли-
це 3.3.
Таблица 3.3. Алгоритм оперативного управления СТЭО
Операция |
|
|
Исполнение |
|
|
|
|
|
|
Запуск и |
генерация |
сигнала |
Переводом пускового ключа на ПУ в положе- |
|
подготовки СТЭО |
|
ние "вкл". |
|
|
|
|
|
Заряд блока входных конденсаторов и вклю- |
|
Готовность СТЭО к работе |
чение контакторов БСК. Включение светово- |
|
||
|
|
|
го индикатора "Готов" на ПУ. |
|
|
|
|
Нажатием рычага задатчика режима тяги ПУ |
|
Интенсивный разгон автомо- |
до упора. Максимальное тяговое усилие ог- |
|
||
биля |
|
|
раничивается автоматически по максималь- |
|
|
|
|
ной величине тока ТЭД. |
|
Регулирование |
скорости |
Изменением положения рычага задатчика ре- |
|
|
движения |
|
|
жима тяги. |
|
|
|
|
Выведением задатчика режима тяги в исход- |
|
Переход на свободной выбег |
ное положение и снижение сигнала задания |
|
||
|
|
|
до 0. |
|
|
|
|
Изменением положения рычага задатчика ре- |
|
Электрическое торможение |
жима торможения на ПУ. Тормозной момент |
|
||
определяется положением рычага задатчика |
|
|||
|
|
|
|
|
|
|
|
режима торможения. |
|
|
|
|
Переключением реверсора согласно выбран- |
|
Изменение |
направления |
ному направлению при условии полной оста- |
|
|
движения |
|
|
новки автомобиля и нулевых положениях за- |
|
|
|
|
датчиков режима тяги и торможения. |
|
|
|
|
Выключением ключа запуска после останов- |
|
Выключение |
|
ки автомобиля и нулевых положениях задат- |
|
|
|
|
|
чиков режима тяги и торможения. |
|
Аварийное отключение |
|
Нажатием красной кнопки ПУ. |
|
|
46
Дальнейшая разработка системы автоматического управления автомобилем с КЭУ и работа вспомогательного оборудования(привод сцепления, гидроусилитель рулевого управления) в электрорежиме подробно изложены в публикациях [18, 24, 27, 45].
КЭУ с параллельной схемой передачи энергии имеет довольно широкое распространение в обоих вариантах. В первом варианте, когда ДВС и ОЭМ работают на общую трансмиссию(рис. 2.5 а), автомобиль имеет постоянную схему привода. Он может быть переднеприводным, заднеприводным или полноприводным, но привод все время постоянный, независимо от того, от какого двигателя приводятся ведущие колёса. КЭУ с параллельной схемой передачи энергии при постоянном полном приводе имеют, например, автомобили Audi Q7, BMW ХЗ, Х5, при постоянном переднем приводе– Сitroёn C4 HDi, Honda Civic Hybrid.
В настоящее время имеются разработки автомобилей с КЭУ с параллельной схемой передачи энергии, выполненной по второму варианту (с приводом на разные оси) (рис. 2.5 б). Например, в прототипах Dodge Durango, Dodge PowerBox привод задних колёс осуществляется от ДВС, передних – от обратимой электромашины, работающей в режиме электродвигателя, следовательно, на них при включении в работу только ДВС, только обратимой электромашины, или обоих агрегатов происходит смена привода.
На автомобилях Saab BioPower 2005 г. и Audi metroproject quattro 2007 г. ДВС приводит передние колёса, а обратимая электромашина установлена в приводе задних колёс. По тому же принципу выполнен Citroën C-Métisse 2006 г.: передний привод – от дизельного ДВС, на задней оси два мотор-колеса. В 2008 г. фирма MIRA (Англия), занимающаяся разработкой, испытаниями и сертификацией автомобильной техники, представила концептуальный автомобиль MIRA H4V Hybrid с КЭУ на базе автомобиля Škoda Fabia. Передние колёса автомобиля приводятся бензиновым ДВС, задние – двумя электродвигателями.
Таким образом, при движении в электрорежиме эти автомобили заднеприводные, при отключении ОЭМ и запуске ДВС – переднеприводные, при работе обоих двигателей – полноприводные.
На автомобилях с КЭУ, имеющей параллельную схему передачи энергии с приводом на разные оси, тип привода может меняться и намеренно для корректировки устойчивости и управляемости. Например, представленный на парижском автосалоне2009 г. Renault Ondelios оснащён ДВС и двумя обратимыми электромашинами, уста-
47
новленными в приводах передней и задней осей. Передняя обратимая электромашина используется как стартер-генератор системы "старт – стоп", ДВС отключается только на остановках. Задний электродвигатель включается только после сигнала от датчиковESP о недостаточной манёвренности. После этого Ondelios становится полноприводным, но кратковременно из-за малой ёмкости аккумуляторов.
При работе КЭУ с параллельной схемойпередачи энергии, выполненной по второму варианту, у автомобиля при переходе с работы от одного двигателя на работу от другого смена привода неизбежна. Например, движение, начавшееся на электродвигателе с приводом на переднюю ось, продолжается на ДВС с приводом на заднюю. Система автоматического управления КЭУ обеспечивает работу ДВС по характеристике минимальных удельных расходов и сохранение -ба ланса энергии, переключая силовую установку независимо от типа привода автомобиля. О влиянии при этом смены привода на устойчивость и управляемость автомобиля информация практически отсутствует. Таким образом, в параллельной схеме КЭУ с приводом на разные оси смена привода может произойти в любой момент в процессе движения. Особенно неприятными могут быть последствия неожиданного изменения типа привода при движении по дорогам с низким коэффициентом сцепления. Кроме того, наиболее опасным может быть режим движения с рекуперацией энергии при избытке мощности ДВС, так как в этом случае одни колёса работают в тяговом режиме, а другие – в тормозном. Внезапная смена привода в условиях низкого коэффициента сцепления с дорогой при движении по криволинейной траектории может привести к частичной или полной потере устойчивости или управляемости автомобиля. Подобное явление обнаружено при испытаниях экспериментального образца автомобиля УАЗ-3153 с КЭУ МАМИ-КВАНТ [1]. Таким образом, для автомобилей с КЭУ с параллельной схемой передачи энергии с приводом разных осей от разных двигателей проблема обеспечения устойчивости
и управляемости при смене привода является актуальной и более подробно рассмотрена в работе [2].
Несмотря на возможность возникновения проблем, связанных с управляемостью и устойчивостью, производители всё-таки идут на создание автомобилей с КЭУ имеющей параллельную схему передачи энергии с приводом на разные оси по следующим причинам:
–в некоторых случаях такую схему легче компоновать;
–существует возможность реализации полноприводной компоновочной схемы автомобиля, что особенно актуально для стран, в которых
48
большую часть года коэффициент сцепления колёс с дорогой не превышает 0,4.
3.3. Конструктивное исполнение КЭУ с дифференциальной схемой передачи энергии
Исследования мирового автомобильного рынка, проведенные Experian Automotive, констатируют постоянный рост продаж автомобилей с КЭУ. Если в 2011 г. их доля в общем рынке автомобилей составляла 2.2%, то в 2012 г. она поднялась до 3.1%. Наибольших успехов технологии производства автомобилей с КЭУ достигли в Японии, где такие автомобили завоевали16% рынка (2011 г., по данным Integrity Exports). Кроме того, японские автомобилис КЭУ являются самими продаваемыми в мире: в рейтингах продаж первые четыре строчки занимает фирма Toyota с моделями Prius – 37,2%, Camry – 8.9%, Prius V – 8.6% и Prius C – 8.1% (по данным Experian Automotive). В 2012 г. Toyota продала около 500 тысяч автомобилей Prius по всему миру, что делает этот автомобиль самым массовым автомобилем с КЭУ в мире, а его энергоустановку – самой распространённой.
Комбинированная энергоустановка с дифференциальной схемой передачи энергии изобретена и запатентована фирмойToyota. По терминологии производителя (Toyota Motor Corporation) эта система может называться Toyota Hybrid System (THS) [41, 42, 51], Power-Split Device [42], Hybrid Synergy Drive (HSD). В базовом варианте эта трансмиссия рассчитана на привод передних колёс и работает с поперечно установленным двигателем внутреннего сгорания (рис. 3.24).
49
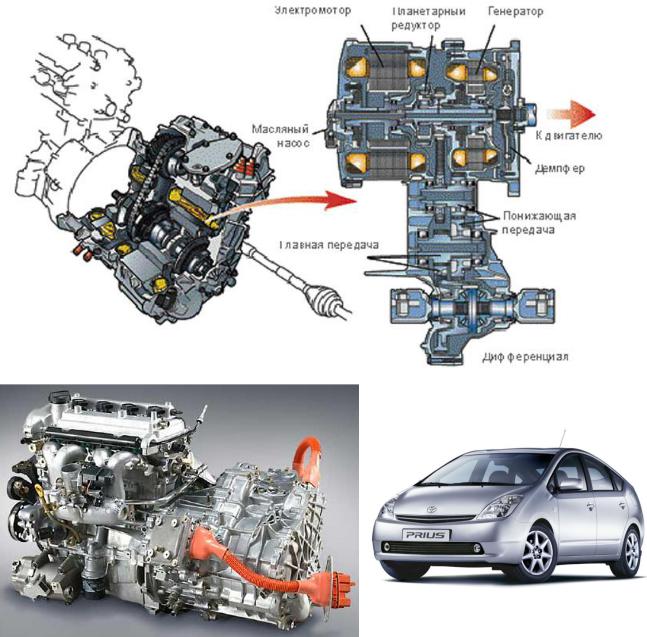
Рис. 3.24. КЭУ Toyota Prius.
Для создания на основе этой КЭУ полноприводной энергоустановки для кроссовера Lexus RX 400h конструкторы установили электродвигатель в приводе задней оси (рис. 3.25).
50