

10229
.pdf81
питание обмотки статора через последовательно включенные резисторы. После завершения пуска резисторы закорачиваются;
при пуске обмотку статора включают на «звезду» (рис. 6.12), после разгона ротора переключают на «треугольник», при этом
Iпуск Iпуск
 3
3
Из-за того, что пусковой момент пропорционален квадрату напряжения
M n U12 , момент значительно снижается, поэтому этот способ пуска приме-
ним для электроприводов с легкими условиями пуска.
Для двигателя с фазным ротором при пуске включают максимальное дополнительное сопротивление RД в цепь ротора, что позволяет уменьшить пус-
ковой ток I пуск и увеличить пусковой момент M n , который становится равным критическому M KP
M n M KP .
По мере разгона ротора с помощью дополнительного устройства доводят сопротивление RД до нуля RД 0 и двигатель работает на естественной ме-
ханической характеристике.
6.2.6. Рабочие характеристики асинхронного электродвигателя
Под рабочими характеристиками понимаются зависимости тока статора I1 , момента M , частоты вращения n2 , скольжения S, коэффициента полезного действия , и коэффициента мощности cos от мощности на валу двигателя
P2 .
I1, M , n2 , S, , cos f P2
Эти характеристики снимаются при следующих условиях:
U1 const , f1 const , RД const .
Вид рабочих характеристик показан на рис. 6.17.
Проанализируем полученные зависимости, изображенные на рис. 6.17, где PH – номинальная мощность двигателя (кВт).
Ток статора I1 . Ток статора при отсутствии нагрузки P2 0 равен току холостого хода I1 I10 , который вследствие наличия воздушного зазора меж-
ду статором и ротором имеет существенную величину. При увеличении мощности на валу ток возрастает, по линейному закону. При мощности P2 PH
магнитная система машины насыщена и потребляемый ток I1 почти не изменяется.

82
I,M,n2 S, η,
c o s φ
n2 |
= n1 |
|
I1 |
|||
|
||||||
M |
||||||
|
|
|
|
|||
|
|
|
|
|
cos φ |
|
|
|
|
|
n2 |
||
|
|
|
|
|||
I10 |
S |
|||||
η |
||||||
|
|
|
|
|||
0 |
PН |
P (кВт) |
|
Рис. 6.17 |
|
Момент двигателя М. Зависимость момента двигателя М и мощности на валу P2 линейна (см. п. 6.2.5), поэтому с ростом нагрузки возрастает и момент
двигателя.
Частота вращения n2 . При холостом ходе, когда P2 0 , частота вращения ротора n2 примерно равняется частоте вращения магнитного поля n2 n1 . С ростом нагрузки P2 частота вращения ротора уменьшается, причем в рабочей
части механической характеристики эта зависимость остается линейной. Скольжение S. При холостом ходе P2 0 , когда n2 n1 скольжение имеет
минимальную величину. С ростом нагрузки частота вращения n2 линейно
уменьшается, соответственно линейно увеличивается скольжение (6.2).
Коэффициент полезного действия . КПД определяется формулой:
|
|
P2 |
|
P2 |
|
, |
|
|
|
|
|||||
|
|
P |
P P |
||||
|
1 |
|
2 |
|
|
||
где P1 – активная мощность, потребляемая из сети; |
|||||||
P PM PЭ1 PЭ 2 Pмех Pдоб |
(кВт) – суммарные потери мощности, рав- |
||||||
ные сумме потерь мощности в магнитопроводе PM , электрических потерь в статоре PЭ1 и роторе PЭ 2 , механических потерь Pмех и добавочных потерь мощ-
ности Pдоб .
При отсутствии нагрузки P2 0 КПД равен нулю. С увеличением нагрузки КПД растет и принимает наибольшее значение max 0,83 0,85 при условии,
что постоянные потери мощности в электродвигателе PM Pмех Pдоб |
оказыва- |
||||
ются равными переменным потерям мощности PЭ1 PЭ 2 в нем (при |
P2 PH ). |
||||
При дальнейшем росте нагрузки КПД уменьшается. |
|
||||
Коэффициент мощности cos : Характер зависимости cos определяется |
|||||
выражением: |
|
|
|
|
|
cos |
|
P1 |
|
||
|
|
|
. |
|
|
|
|
U1I1 |
|
||
3 |
|
||||
83
При холостом ходе, когда P2 0 , cos достигает наименьшего значения cos 0 0,2 0,3 . С увеличением нагрузки cos увеличивается и достигает при номинальной нагрузке P2 PH значения 0,83 0,89. С увеличением нагрузки больше номинальной наблюдается некоторое снижение cos за счет увеличения падения напряжения на индуктивном сопротивлении обмотки статора асинхронного двигателя.
6.3. Синхронный двигатель трёхфазного переменного тока
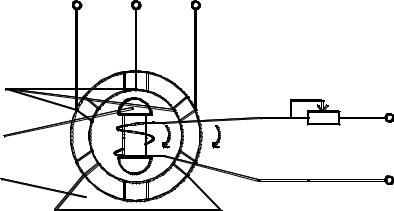
6.3.1. Устройство и принцип работы
Конструктивная схема трехфазного синхронного двигателя показана на рис. 6.18.
A(L1) |
|
B(L2) |
С( L3) |
|
2 |
|
|
RB |
|
3 |
|
|
+ |
|
OB |
n2 |
n1 |
||
|
||||
|
|
|
||
1 |
|
|
UB |
|
|
|
- |
||
|
|
|
Рис. 6.18 |
Синхронный двигатель (СД) состоит из неподвижной части 1, именуемой статором, и подвижной 3, именуемой ротором. Статор выполнен аналогично статору асинхронного двигателя. По окружности статора в пазах размещена трехфазная статорная обмотка 2, которая может быть соединена или в «звезду»U Л 380 B , или в «треугольник» U Л 220 B . На роторе размещена обмот-
ка возбуждения (ОВ), представляющая собой электромагнит постоянного тока и получающая питание от источника постоянного напряжения.
Если частота вращения ротора n2 1000 об/мин, то ротор выполняется в явнополюсном исполнении (рис 6.18), если же n2 1000 об/мин, то ротор вы-
полняется в неявнополюсном исполнении.
При подаче к трехфазной обмотке статора трехфазного напряжения в ней образуется вращающееся магнитное поле с синхронной частотой вращения
n |
60 f1 |
(об/мин), |
(6.21) |
|
|||
1 |
|
|
|
|
|
|
где f1 – частота питающей сети (Гц);

84
– число пар магнитных полюсов, 1, 2, 3...
Вращающееся магнитное поле, взаимодействуя с однонаправленным магнитным полем обмотки возбуждения, создает электромагнитный (вращающий) момент, который разгоняет ротор до частоты вращения
n |
|
n |
|
60 f1 |
, |
(6.22) |
2 |
|
|||||
|
1 |
|
|
|
||
|
|
|
|
|
||
Так как частоты вращения магнитного поля и ротора одинаковы, двигатель называется синхронным.
Рассмотрим, как образуется электромагнитный момент М синхронного двигателя (рис. 6.12).
 2
2
N
статор 
 N
N

 F1
F1


 S
S


 N
N

 F2
F2

 F1
F1
 S
S


 N
N




F2
S |
S |
а) Мс = 0 |
б) Мс > 0 |
|
Рис. 6.19 |
На рис. 6.19 показано взаимодействие магнитных полюсов статорной обмотки (N-S) и обмотки возбуждения (S-N) в двух случаях:
а) момент сопротивления M C 0 (холостой ход); б) момент сопротивления M C 0 .
При холостом ходе M C 0 оси магнитных полей статора и обмотки возбуждения, а также силы взаимодействия F1, F 2 между полюсами направлены
по одной прямой и не создают вращающего (электромагнитного) момента
M 0 .
При нагрузке M C 0 оси магнитных полей статора и обмотки возбуждения образуют между собой угол . Силы взаимодействия между полюсами
F1, F 2 создают вращающий (электромагнитный) момент, который компенсирует момент нагрузки M M C , и двигатель работает с электромагнитным мо-
ментом.
Если синхронная машина работает с отставанием магнитного поля обмотки возбуждения (угол θ), то такой режим называется двигательным, если опережает (угол θ2), то синхронная машина переходит в генераторный режим.
85
6.3.2. Схема замещения трёхфазного синхронного двигателя
Синхронный двигатель (С.Д.) состоит из трех симметричных фаз, поэтому достаточно рассмотреть схему замещения одной фазы (рис. 6.20).
|
I C |
X C |
|
|
|
|
|
|
U 1ф ~ |
E0 |
|
|
|
|
|
|
|
Рис. 6.20 |
|
На рисунке 6.20 показано: |
|
|
|
U1 , IC – напряжение и ток статора статорной обмотки; |
|
||
X C |
– индуктивное сопротивление статорной обмотки (Ом); |
|
|
E0 |
– ЭДС, наводимая магнитным потоком обмотки возбуждения в статор- |
||
ной обмотке. ЭДС E0 пропорциональна току возбуждения I B E0 |
I B . |
||
Составим уравнение электрического состояния статорной обмотки:
|
|
|
U 1 E0 |
jX C I C |
|
(6.23)
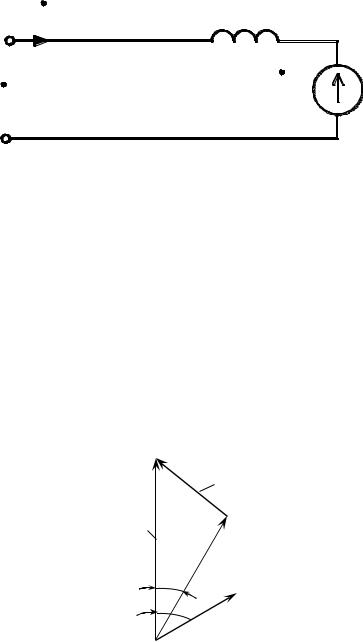
Векторная диаграмма для схемы замещения показана на рис. 6.21.
|
jXC I C |
|
|
|
|
U 1 |
|
|
|
|
E0 |
|
|
|
θ
I C
 φ
φ
Рис. 6.21
Построение векторной диаграммы начинаем с вектора фазного напряжения
|
|
|
U 1 . Под углом сдвига фаз строим вектор тока статора I C . Далее, из конца |
||
|
|
|
вектора U 1 под углом 900 к вектору тока I C |
строим вектор падения напряже- |
|
|
|
|
ния на индуктивном сопротивлении |
jX C I C . |
Соединив начало вектора U 1 и |

|
86 |
|
|
начало вектора jX C I C , получаем вектор ЭДС E 0 и угол между векторами
U 1 и E 0 .
Принимая, что синхронная машина идеальная, т.е. без потерь, мощность на
валу двигателя P2 будет равна потребляемой активной мощности P1 |
из сети: |
|||||
P P 3U |
1 |
I |
C |
cos |
(кВт), |
(6.24) |
2 1 |
|
|
|
|
||
где – угол сдвига фаз.
6.3.3. Формула электромагнитного момента. Угловая характеристика
Электромагнитный (вращающий) момент синхронного двигателя равен:
M P2 (Н∙м),
1
где 1 – угловая частота вращения магнитного поля статора, 1/с.
1 30n1 ,
где n1 – частота вращения магнитного поля, об/мин. С учетом (6.24) электромагнитный момент будет:
M |
3U1 IC cos |
(6.25) |
|
1 |
|||
|
|
В таком виде (6.25) формула момента не используется. После нескольких преобразований [3] формула момента примет следующий вид:
M |
3U1 IC E0 |
sin |
(6.26) |
|
|||
|
1 X C |
|
|
Проанализируем полученное выражение:
момент пропорционален фазному напряжению M U1 , поэтому снижение напряжения не оказывает существенного влияния на момент, в отличие от асинхронного двигателя;
момент пропорционален ЭДС E0 , соответственно току возбуждения
M U1 I B , поэтому, чем больше ток, тем больше момент.
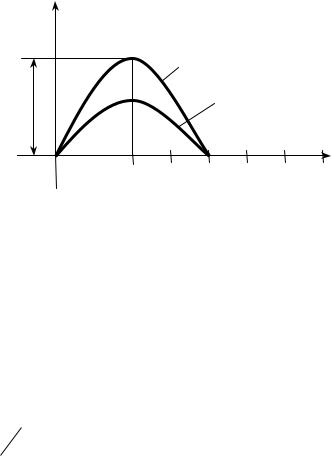
Под угловой характеристикой понимается зависимость момента двигателя
от угла θ:
M f .
На рис. 6.22 приведена угловая характеристика синхронного двигателя.
|
|
|
87 |
|
M( Н м ) |
|
|
||
|
|
|
IВ>IB1 |
|
Mкр |
|
IВ1 |
|
|
|
I |
|
II |
|
0 |
|
|
π |
θ |
|
||||
|
||||
|
|
|
||
|
|
2 |
|
|
|
|
|
|
|
|
|
Рис. 6.22 |
|
|
Угловая характеристика позволяет проанализировать процессы в двигателе при изменении нагрузки на валу ротора. При появлении момента сопротивления M C на валу двигателя ротор притормаживается, угол нагрузки θ увеличи-
вается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М = МС наступает новый установившийся режим. При номинальном режиме двигателя МНОМ соответствующий угол
HOM 25 300 . При M C M max ротор отстаёт больше чем на максимально допустимый угол 2 , момент двигателя начнет уменьшаться, ротор будет за-
медляться вплоть до полной остановки. Этот процесс называется выпадением двигателя из синхронизма, при котором машина должна быть отключена от сети.
Существуют два способа регулирования частоты вращения n2 :
изменением частоты питающей сети f1 var с помощью преобразователя частоты f f f ' ;
изменением числа пар магнитных полюсов p var p 1, 2, 3... , но практического применения этот способ не получил.C 11
6.3.4. Пусковые режимы синхронного двигателя
Известно [2], что синхронный двигатель не обладает собственным пусковым моментом. Если его включить в сеть, то ротор будет совершать колебания около положения равновесия с частотой f = 100 Гц, и двигатель не запустится.
Чаще всего синхронный двигатель запускают в асинхронном режиме (рис. 6.23) в следующей последовательности:

88
A(L1) B(L2) С( L3)
О.В. |
К1 |
RB |
|
||
|
|
|
RД |
К2 |
+ |
|
||
|
|
U B |
|
|
- |
|
Рис. 6.23 |
|
1.С помощью контакта K1 отключают обмотку возбуждения ОВ от источника питания U B и замыкают ее с помощью контакта K2 на дополнительное сопротивление RД .
2.Подключают трехфазную статорную обмотку к сети, в ней образуется вращающееся магнитное поле с частотой вращения:
n1 60 f1 (об/мин). p
Этот магнитный поток, пересекая витки дополнительной пусковой обмотки (типа «беличьей клетки»), расположенной на роторе, наводит в ней ЭДС, и по обмотке идет ток. Этот ток, взаимодействуя с вращающимся магнитным полем, образует электромагнитный момент аналогично асинхронному двигателю, который начинает разгонять ротор до частоты вращения n2 .
3. При достижении ротором частоты вращения n2 0.95 098n1 с помощью контакта К1 подключают обмотку возбуждения (ОВ) к источнику питания. Ротор после нескольких колебаний входит в синхронизм:
n2 n1 .
4. После достижения синхронизма отключают RД с помощью контакта K2 , и на этом процесс пуска заканчивается.
6.3.5. U-образные характеристики синхронного двигателя
Под U-образными характеристиками синхронного двигателя понимается зависимость тока статора I C и коэффициента мощности от тока возбуждения
I B .
IC f I B , cos f I B .

|
|
89 |
|
|
Зависимость тока статора |
I C от параметров синхронного |
двигателя |
||
U1 , E0 , X CИН описывается следующим выражением: |
|
|||
|
|
|
|
|
|
|
|
|
|
I C |
U 1 E0 |
. |
(6.27) |
|
|
||||
jX CИН
Из анализа (6.27) в зависимости от величины тока возбуждения синхронный двигатель может работать в трёх качественно различных режимах.
I режим. Ток возбуждения изменяется в пределах 0 I B I BH , где I BH – номинальное значение тока возбуждения. При этом напряжение U1 больше, чем ЭДС E0 U1 E0 , ток статора I C > 0, cos > 0. Двигатель обладает ак-
тивно-индуктивными свойствами, т.е. потребляет отстающий ток. Двигатель недовозбуждён.
II режим. Ток возбуждения IВ = IВН. При этом напряжение U1 равняется ЭДС E0 U1 E0 , ток статора I C = 0 и cos = 1. Двигатель обладает активны-
ми свойствами и потребляет из сети активную мощность P – минимальную мощность. Двигатель имеет номинальный ток возбуждения.
III режим. Ток возбуждения IВ > IВН. При этом напряжение U1 меньше ЭДС E0 U1 E0 , ток статора I C < 0 и cos < 0. Двигатель обладает активно-
емкостными свойствами, т.е. потребляет из сети активную мощность P, но отдает в сеть реактивную мощность - QC. Двигатель перевозбужден и потребляет опережающий ток.
Эти режимы изображены на рис. 6.24.
Ic(A) |
cosφ |
a’
I
a |
II |
a II
MC>0 1,0 MC=0
III |
I |
|
III |
|
|
||
|
Iв(A) |
IBH |
Iв(A) |
|
|
Рис. 6.24
На рис. 6.24 первый режим обозначен I, второй режим обозначен точкой «а» и соответствует номинальному току возбуждения IВН, третий режим обозначен III.
При нагрузке на валу двигателя МС > 0 точка «а» перемещается вправо и соответствует точке «а'».
Свойство синхронных электродвигателей потреблять из питающей сети опережающий ток особенно ценно для промышленных установок, так как оно позволяет одновременно с использованием синхронной машины в качестве
90
приводного двигателя использовать ее и для повышения коэффициента мощности cos установки без применения статических конденсаторов.
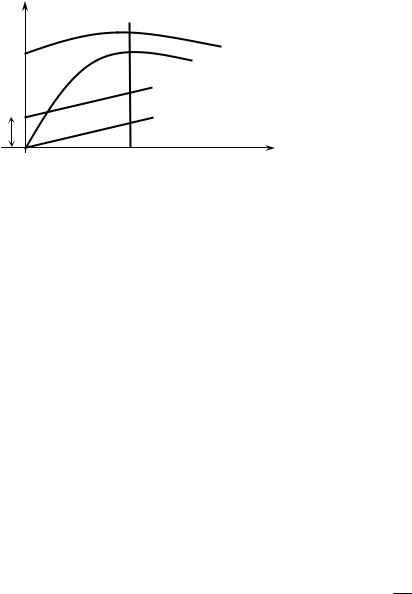
6.3.6. Рабочие характеристики синхронного двигателя
Под рабочими характеристиками синхронного двигателя понимаются зависимости тока статора I C , момента M, частоты вращения ротора n2, коэффи-
циента мощности cos и КПД от мощности на валу двигателя Р2.
IC , M , n2 f P2
Рабочие характеристики показаны на рис. 6.25.
Ic, M, n2 ,η
c o |
s φ |
n2 |
|||
|
|
|
|
||
|
|
|
|
|
cosφ |
|
|
|
IC |
η |
|
|
|
|
|
|
|
IC0 |
|
|
M |
|
|
|
|
|
|
||
|
|
|
|
|
|
0 |
|
PН |
|
P2(кВт) |
|
|
|
|
Рис. 6.25 |
|
|
Рабочие характеристики снимаются при следующих условиях: U1 const , f1 const , I B const . Ток статора I C при холостом ходе P2 0 имеет незначительную величину, с ростом нагрузки он линейно увеличивается. Скорость
вращения ротора n |
|
|
60 f1 |
остается строго постоянной во всех режимах рабо- |
|||
2 |
|
||||||
|
|
p |
|
|
|
||
|
|
|
|
|
|
||
ты. Взаимосвязь между моментом М и мощностью на валу Р2 равна M |
P2 |
, |
|||||
|
|||||||
|
|
|
|
|
1 |
||
где 1 – величина постоянная, поэтому зависимость |
M f P2 линейна, т.е. с |
||||||
ростом нагрузки момент возрастает. |
|
|
|
||||
Характер изменения cos f P2 зависит от |
того, какое возбуждение |
||||||
установить. Если установить cos = 1 при номинальной нагрузке, то при недогрузке двигатель забирает из сети реактивный опережающий ток, при перегрузке – отстающий.
Характеристика КПД f P2 имеет обычный для всех электрических машин характер. Она быстро растет при увеличении нагрузки от 0 до P22 , а за-
тем мало меняется в пределах нагрузки от P2  2 до PH .
2 до PH .