

10000
.pdf61
Поправка за компарирование
Компарирование – это сравнение длины мерного прибора с длиной эталона. Расхождение l равно (lф – l0) , где lф – фактическая длина мерного прибора, определяется на компараторе; l0 – номинальная длина, которая должна быть. Суммарная поправка за компарирование равна lК = n l , где n - число откладываний мерного прибора на линии АВ. Знак поправки соответствует знаку разности (lф – l0).
Точность измерения расстояний стальной рулеткой зависит от следующих ошибок: компарирования; отклонения рулетки от створа; искривления рулетки в горизонтальной и вертикальной плоскостях; пренебрежения поправками за наклон (все это систематические ошибки); непостоянства натяжения рулетки в 10 кг; неточного учёта поправок за наклон и температуру (случайные ошибки).
Относительная ошибка измерений стальной рулеткой составляет 1/3000 в благоприятных условиях (асфальт, дорога, ровная местность) и 1/1000 в неблагоприятных условиях (пересеченная местность, болото, кустарник). В среднем она равна 1/2000.
12.2. КОСВЕННЫЙ СПОСОБ ЛИНЕЙНЫХ ИЗМЕРЕНИЙ
Применяемые приборы – светодальномеры, радиодальномеры,
оптические дальномеры. Принцип измерения расстояний свето– или радиодальномерами основан на временном (импульсном), фазовом или частотном методах.
Принцип измерения расстояний оптическими дальномерами основан на оптико-механическом решении параллактического треугольника. Так, если в точку В измеряемой линии поместить базис известной длины b, а в точке А измерить уголна концы этого базиса, то можно вычислить высоту треугольника d, которая и является искомым расстоянием АВ:
d b2 ctg 2 .
Существуют оптические дальномеры с постоянным базисом b и переменным параллактическим углом и дальномеры с постоянным углом и переменным базисом b. К последним относится нитяный дальномер в зрительных трубах геодезических приборов, а в качестве базиса используется

62
нивелирная рейка. В таком дальномере постоянный параллактический угол формируют две дальномерные нити сетки – верхняя в и нижняя н.
Теория нитяного дальномера вытекает из подобия заштрихованных треугольников, откуда следует Е/f = n/вн, поэтому Е = fn/вн, но поскольку
расстояние между дальномерными нитями вн и фокусное расстояние объектива f есть величины постоянные, то их отношение f/вн = К – также постоянная величина, которая называется коэффициентом дальномера. Значения f и вн подбираются такими, чтобы коэффициент дальномера был равен 100. Тогда расстояние АВ будет равно: L = E + f + = Kn + (f + ) = Kn + C ,
где С – постоянная поправка дальномера. Промышленность выпускает трубы геодезических приборов с внутренней фокусировкой, у которых С = 3–5 см и такую поправку, как правило, не учитывают.
Процесс измерения расстояний нитяным дальномером заключается в следующем. Прибор (теодолит, нивелир) устанавливают в точке А, а в точке В
– вертикально нивелирную рейку. Визируют на рейку и определяют количество сантиметровых делений между верхней и нижней дальномерными нитями, которое при К=100 будет соответствовать количеству метров между точками А и В. Поэтому перед производством измерений необходимо убедиться в том, что
коэффициент дальномера К = 100.
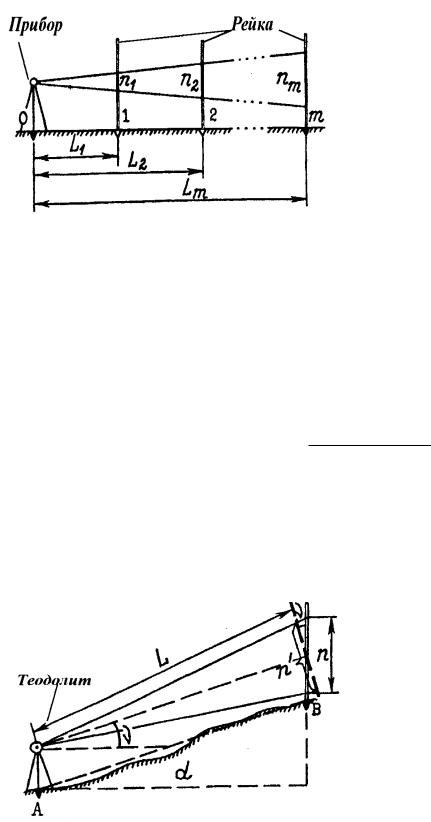
Для этого закрепляют на ровном участке прямую линию длиной 120–150 м, забивая колышки через 20–30 м. Рулеткой измеряют расстояния от каждого колышка до начального, то есть L1, L2 ,..., Lm. Установив теодолит в точке О, определяют n1, n2 ,…, nm – количество сантиметровых делений между дальномерными нитями по
63
довательно устанавливаемой в точках 1, 2,...,m. Зная, что L1=Kn1, L2= =Kn2,…,Lm = Knm, составляют разности L2 – L1= K(n2 – n1), L3 – L1= K(n3 – n1)
,…, Lm– L1= K(nm–n1) откуда вычисляют:
K1 |
L2 L1 |
, |
K2 |
L3 L1 |
, …, Km |
Lm L1 |
, |
|
|
|
|||||
|
n2 n1 |
|
n3 n1 |
nm n1 |
|||
а за окончательное значение коэффициента дальномера принимают среднее арифметическое:
K K1 K2 ... Km . m
Рассмотренная выше теория нитяного дальномера основана на взаимной перпендикулярности визирной оси VV зрительной трубы и базиса – нивелирной рейки, которая всегда устанавливается вертикально. При измерении наклонных расстояний L эта перпендикулярность не будет соблюдаться, поэтому отсчет n по рейке будет преувеличен.
Правильный отсчет п' = псоs ,
а наклонная длина L= Кп'= Кпсоs . Отсюда следует, что горизонтальное проложение d =
Lcos2 и поправка за наклон l = L – Lcos2 = = L(1-cos2 ) = Lsin2 .
Как видим, она отличается от таковой при измерении длин линий
лентой.
Точность измерения расстояний нитяным дальномером гораздо ниже точности измерений стальной рулеткой. Так, длины до 100 м можно измерять с относительной ошибкой 1/500, длины до 200 м – с относительной ошибкой 1/400 – 1/200. В среднем она составляет 1/300 измеряемой длины.
|
|
|
|
64 |
|
|
|
|
|
|
|
|
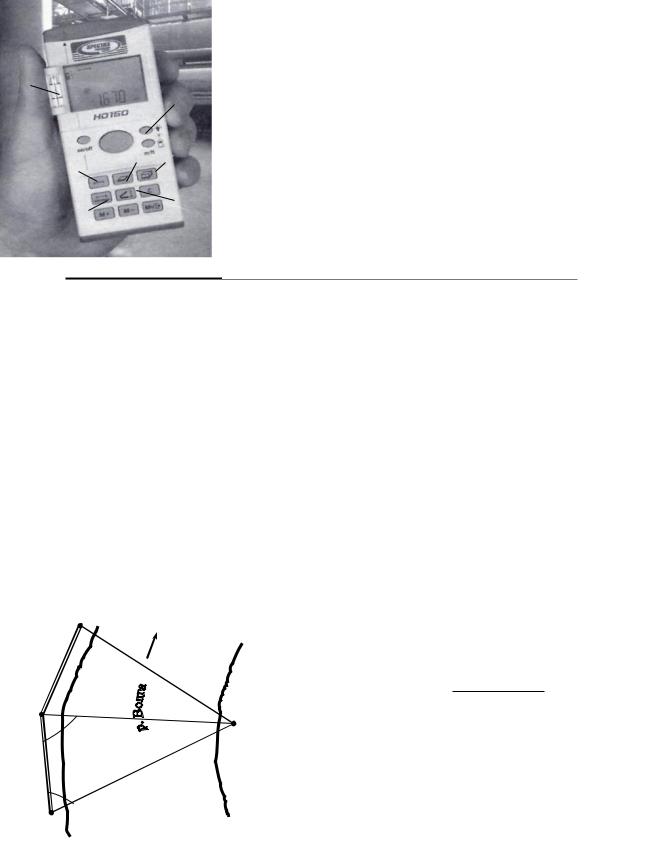
В настоящее время на строительных |
||||||
|
|
|
площадках широко применяются так называемые |
||||||
|
|
|
ручные безотражательные дальномеры (лазерные |
||||||
7 |
|
|
рулетки). |
|
|
|
|
|
|
|
|
6 |
Например, многофункциональный даль- |
||||||
|
|
|
номер |
HD |
150 фирмы |
Trimble |
позволяет |
||
|
2 |
3 |
измерять |
расстояния |
1 от |
0,3 м |
до 150 м с |
||
1 |
точностью 2–3 мм, определять площади 2, объёмы |
||||||||
|
|
||||||||
|
|
|
3, высоту сооружений 4, производить min/max |
||||||
|
5 |
4 |
измерения |
5. |
Результаты |
измерений |
|||
|
|
|
|
|
|
|
|
||
|
|
|
высвечиваются на экране дисплея, который имеет |
||||||
|
|
|
кнопку |
подсветки |
6. |
Рулетка |
снабжена |
||
12.3.ОПРЕДЕЛЕНИЕцилиндрическимНЕПРИСТУПНОГОуровнем РАССТОЯНИЯ7.
ИВЫСОТЫ СООРУЖЕНИЯ
Такая задача возникает при определении расстояния между точками А и В местности, разделенными преградой (река, овраг и др.) и при определении высоты сооружения, когда измерить эти величины непосредственно нельзя или нечем.
Для определения горизонтального проложения АВ = d через водную или иную преграду, когда в распоряжении имеютcя только теодолит и рулетка, поступают следующим образом:
1. Закрепляют на местности дополнительную точку С так, чтобы треугольник АВС был по возможности близок к равноcтороннему.
2. Измеряют расстояние АС и определяют его горизонтальное проложение b, учитывая все необходимые поправки. Эта операция носит название «разбивка базиса».
3. Теодолитом измеряют горизонтальные углы A и C .
Д
|
|
|
sin C |
|
А |
|
|
d b sin A C . |
|
|
|
d |
В |
|
|
A |
Для контроля рекомендуется |
в |
|
|
|
|||
|
|
треугольнике АВС измерять все три угла, а |
||
b |
|
|
||
|
|
также определять неприступное расстояние |
||
|
C |
|
||
|
|
с двух базисов, решая дополнительный |
||
|
|
|
||
С |
|
|
треугольник АВД. |
|
|
Для определения высоты Н сооружения измеряют углы наклона 1 и 2 |
|||
на верхнюю и нижнюю точки сооружения. Зная горизонтальное проложение d , вычисляют частные высоты:

65
h1 = dtg 1 и h2 = dtg 2 ,
по которым находят общую высоту сооружения:
Н = h1 h2 = d(tg 1 tg 2),
придерживаясь правила: если углы наклона имеют один и тот же знак, то в скобках будет знак «минус»; если углы1 и 2 разного знака, то в скобках – знак «плюс».
13. ПОНЯТИЕ О ГОСУДАРСТВЕННОЙ ГЕОДЕЗИЧЕСКОЙ СЕТИ
На всей территории страны равномерно распределены и надежно закреплены пункты, координаты которых X , У и высоты Н определены методами высшей геодезии. Эти пункты составляют государственную геодезическую сеть ГГС: плановую и высотную. Плановая и высотная ГГС подразделяются на четыре класса. Координаты и высоты пунктов определяют по принципу перехода от общего к частному. Вначале определяют с наивысшей степенью точности координаты пунктов в сети 1 класса, расстояние между которыми от 20 до 25 км. Затем такую сеть сгущают пунктами сети 2 класса, определяя координаты этих пунктов от пунктов 1 класса. Затем строят сети 3 и 4 класса от пунктов высших классов.
Такое сгущение приводит к тому, что расстояние между пунктами сокращается в среднем до 5 км. Однако этого не достаточно для решения задач инженерной геодезии.
Дальнейшее сгущение плотности пунктов ГГС достигается построением сетей местного значения 1-го и 2-го разрядов и съёмочными сетями. Координаты пунктов ГГС и сетей сгущения определяют методами
триангуляции, трилатерации и полигонометрии.
13.1. ТРИАНГУЛЯЦИЯ, ТРИЛАТЕРАЦИЯ, ПОЛИГОНОМЕТРИЯ
Метод триангуляции заключается в том, что построение геодезической сети осуществляется в виде примыкающих друг к другу треугольников 1–2–4, 2–3–4, 3–4–5 и т. д. В каждом треугольнике измеряют все три угла. Зная длину хотя бы одной стороны, например, 4–5, которая называется базисом, вычисляют по теореме
синусов длины всех других сторон. Координаты одного из пунктов и азимут
одной из сторон определяют из астро-
66
номических наблюдений. По этим данным вычисляют координаты других пунктов.
Метод трилатерации заключается в том, что в треугольниках измеряют не углы, а все их стороны. Значения углов, а затем и координат вершин треугольников получают путем вычислений.
Метод полигонометрии предусматри-вает измерение горизонтальных углов и длин сторон между геодезическими пунктами.
Полигонометрические ходы, служащие для создания съёмочного обоснования, называются просто теодолитными ходами (как теодолитный ход в РГР №1).
Абсолютные высоты точек государственной нивелирной сети определяются методом нивелирования I, II, III и IV классов. Сгущение государственной нивелирной сети осуществляется техническим нивелированием.
Пункты ГГС закрепляются на местности постоянными центрами и реперами, которые подразделяются на грунтовые и стенные. Для взаимной видимости между геодезическими пунктами устанавливают над их центрами временные или постоянные геодезические знаки: вехи, пирамиды, сигналы.
13.2. СПУТНИКОВЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК
Спутниковые методы определения координат точек земной поверхности предусматривают использование (вместо неподвижных геодезических пунктов) движущихся по орбите искусственных спутников Земли (ИСЗ), координаты которых можно определить на любой момент времени.
Для этих целей созданы так называемые Спутниковые Навигационные Системы (СНС). Они представляют собой специальный комплекс космических и наземных технических средств, оснащённых программным обеспечением и соответствующими технологиями. Каждая система состоит из трёх самостоятельных подсистем, носящих название сегменты: космический сегмент, сегмент управления и сегмент пользователей (аппаратура потребителей).

67
Спутниковые навигационные системы: NAVSTAR GPS и ГЛОНАСС
Космический сегмент состоит из двух спутниковых систем: российская ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) и
американская NAVSTAR GPS (NAVigation System with Time And Ranging, Global Positioning System, т. е. навигационная спутниковая система измерения времени и местоположения или глобальная система позиционирования). В настоящее время любую СНС называют GPS. Российская и американская GPS состоит (каждая) из 24 ИСЗ, орбиты которых практически круговые и расположены в трех орбитальных плоскостях (для ГЛОНАСС) и в шести (для NAVSTAR) на расстоянии около 26 тысяч км от центра Земли. Каждый спутник имеет на борту: солнечные батареи, несколько атомных часов, двигатели корректировки орбиты, приемо-передающую аппаратуру, компьютер. Спутники постоянно транслируют на Землю координатные радиосигналы и навигационные сообщения. Такое количество ИСЗ и их расположение обеспечивает прием сигналов как минимум от четырех спутников в любой части Земли.
Сегмент управления (наземный сегмент) ГЛОНАС состоит из: центра управления системой (Москва), группы станций слежения (Санкт-Петербург, Воркута, Якутск, Петропавловск-Камчатский, Уссурийск, Улан-Удэ, Енисейск) и ряда других станций.
Сегмент пользователей состоит из комплекса аппаратно-программных средств, реализующих основное назначение GPS – определение координат точек. Измерив из некоторой точки Земли расстояния как минимум до четырех навигационных спутников (которые играют роль подвижных геодезических пунктов), вычисляют координаты этой точки путем решения обратной линейной засечки.
Основной принцип определения расстояний до навигационных спутников заключается в измерении времени, за которое радиосигнал спутника достигает приемника на Земле и в последующем вычислении по этому времени искомого расстояния. По конструктивным особенностям различают одноканальные,

68
двухканальные и многоканальные приемники GPS , которые, в свою очередь, могут быть одноили двухчастотные. По точности определения координат приемники GPS делятся на три класса: навигационный класс с точностью определения координат 150–200 м; класс картографии и ГИС точности 1–5 м; геодезический класс точности до 1 см.
13.3. ПОНЯТИЕ О ГЕОИНФОРМАЦИОННЫХ СИСТЕМАХ
Геоинформационная система (ГИС) представляет собой автоматизированную систему, базирующуюся на последних достижениях науки и техники в области информатики, космической навигации, электронной тахеометрии, стереофотограмметрии, и др. Она предназначена для получения, хранения, обновления, визуализации различной информации, связанной с картографированием, изысканиями, проектированием, строительством и эксплуатацией инженерных объектов, а также с диагностикой, паспортизацией, экономикой, экологией, сервисом, демографией, безопасностью и т. п.
С точки зрения функционального назначения ГИС можно рассматривать
как:
систему управления разнообразными объектами (земельные угодья, природные ресурсы, городские хозяйства, транспорт, экология и т. д.);
автоматизированную информационную систему, объединяющую технологии САПР (проектирование), АСНИ (научные исследования), АСИС (информационные исследования);
геосистему, включающую ГИС (географические), СКИ (картографические), АФС (фотограмметрические), ЗИС (земельные), АКС (кадастровые) и т. п.;
систему, использующую базы данных цифровой и графической информации;
систему моделирования, использующую методы и процессы математического моделирования;
систему получения проектных решений и их согласование с землепользователями, заинтересованными ведомствами и организациями;
систему представления информации, предназначенную, прежде всего,
для получения картографической информации с различными нагрузками и в различных масштабах;
интегрированную систему, объединяющую многообразный набор методов и технологий географической информации;
прикладную систему, имеющую широкое применение на транспорте, навигации, военном деле, топографии, географии, геологии, экономике, экологии, демографии и т. д.;
систему массового пользования, позволяющую применять картографическую информацию на уровне деловой графики.

69
Одним из основных принципов организации пространственной информации в ГИС является послойный принцип.
Рельеф Охранные зоны Гидрография
Коммуникации
Схемы
Плотность
Дороги
Интегрированная информационная основа ГИС
Тематические слои в ГИС являются определенными типами цифровых картографических моделей, построенными на основе объединения пространственных объектов, имеющих общие свойства или функциональные признаки.
Совокупность тематических слоёв образует интегрированную основу графической части ГИС, в которой объединяющей основой (подложкой) являются цифровые и электронные карты.
14. ПОНЯТИЕ О СЪЕМКАХ МЕСТНОСТИ
Съёмкой называется совокупность геодезических действий, выполняемых на местности с целью создания карты или плана определенного масштаба. Различают горизонтальную, вертикальную и топографическую
съёмки.
Горизонтальная съёмка. В результате такой съёмки получают контурный план, на котором изображены только предметы и контуры местности (см. РГР №1).
Вертикальная съёмка. В результате такой съёмки получают план, на котором горизонталями изображен рельеф участка местности (см. лабораторную работу №1 или РГР №3).
Топографическая съёмка – это совокупность горизонтальной и вертикальной съёмок, в результате которых на плане (карте) получают изображение предметов, контуров и рельефа местности.
Геодезическую съёмку производят с точек съёмочного обоснования, закрепленных на местности, координаты X , У которых и высоты Н известны. С каждой такой точки простым теодолитом можно произвести съёмку расположенного вокруг неё участка в радиусе до 200 м. Поэтому для съёмки больших участков или на застроенной территории необходимо иметь достаточное количество точек съёмочного обоснования, которые формируют съёмочную сеть. Точки такого съёмочного обоснования закрепляют на местности временными центрами – кольями, столбами, штырями.
Различают следующие основные виды съёмок: теодолитная, тахеометрическая, нивелирование поверхности, фототопографическая. Каждая из перечисленных съёмок включает в себя полевые и камеральные работы, которым предшествует рекогносцировка, предусматривающая знакомство с объектом съёмки и составление или уточнение методики её производства.
70
Специальные виды съёмок предусматривают использование трёхмерных лазерных сканеров наземного или воздушного базирования, а также спутниковых приёмников.
14.1. ТЕОДОЛИТНАЯ СЪЕМКА
Это горизонтальная съёмка предметов и контуров местности.
Полевые работы:
1. Закрепление на местности точек съёмочного обоснования (это точки 1, 2, 3, 4 и 5 в РГР №1).
2.Измерение углов и расстояний между съёмочными точками (проложение теодолитного хода).
3. Съёмка предметов и контуров местности различными способами:
способ прямоугольных координат (иначе способ перпендикуляров).
Для построения перпендикуляров, длина которых превышает 4–8 м в зависимости от масштаба плана, применяются специальные приборы – эккеры;
способ угловых и линейных засечек;
способ полярных координат;
способ створов;
способ обхода (обмера).
Детальное описание перечисленных способов съёмки приведено в методических указаниях для выполнения РГР№1.
Результаты съёмки предметов и контуров местности наносят на схематический чертёж снимаемого участка непосредственно в процессе измерений. Такой чертёж со всеми данными измерений и пояснениями называется абрис.
В результате выполнения полевых работ получают: схему съёмочного обоснования с его привязкой к пунктам ГГС; журналы измерения: горизонтальных углов, вертикальных углов и длин сторон теодолитного хода; абрисы. Эти материалы выдаются студентам для выполнения РГР №1.
Камеральные работы:
1. Вычисление координат точек теодолитного хода.
2. Составление плана теодолитной съемки. С этими расчётными и графическими работами студенты детально знакомятся при выполнении РГР №1.
14.2. ТАХЕОМЕТРИЧЕСКАЯ СЪЕМКА
Название – от греческого слова «быстрое измерение». Это топографическая съёмка предметов, контуров и рельефа местности, при