

9594
.pdfГеодезической основой крупномасштабных съемок 1:5000; 1:2000; 1:1000; 1:500 служат ГГС и ОМС всех классов, геодезические сети сгуще-
ния и съемочные сети. На застроенных и незастроенных территориях сети проектируются с целью топографических съемок, удовлетворения требо-
ваний разбивочных работ; по плотности сети рассматриваются в соответ-
ствии с требованиями масштаба выполняемой съемки (табл. 3.1).
Требования плотности сетей |
|
Таблица 2.1. |
|||
|
|
|
|
|
|
Площадь |
Виды опорных сетей |
|
Съемочное обоснование |
||
топографи- |
Триангуляция, трилатерация, по- |
Нивели- |
плановое |
высотное |
|
ческой |
лигонометрия |
рование |
|
|
|
съемки, км2 |
ГГС, (классы) |
Геодезическая |
(классы) |
|
|
|
|
сеть сгущения |
|
|
|
|
|
(разряды), |
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
200 и более |
2, 3, 4, |
1, 2, |
II, III, IV |
Теодолит- |
Техниче- |
|
|
|
|
ные ходы, |
ское ниве- |
|
|
|
|
микротри- |
лирование |
|
|
|
|
ангуляция |
|
От 200 до |
3, 4, |
1, 2 |
II, III, IV |
|
|
50 |
4, |
1, 2, |
|
|
|
От 50 до 10 |
4 |
1, 2, |
III, IV |
|
|
От 10 до 5 |
- |
1, 2 |
IV |
|
|
От 5 до 2,5 |
- |
2 |
IV |
|
|
От 2,5 до 1 |
|
|
IV |
|
|
До 1 |
|
|
- |
|
|
При съемке территорий, вытянутых узкой полосой, класс опорных сетей должен быть выше. Топографическая съемка для сельскохозяйствен-
ного строительства может выполняться на обосновании несколько пони-
женной точности, опираться только на сеть сгущения, если площадь съем-
ки в масштабе 1:2000 не превышает 10 км2.
Особенности расчета точности геодезического обоснования в том,
что необходимо учитывать как относительную, так и абсолютную ошибки.
Их предельное значение ограничивается масштабом съемки и точностью разбивки. В связи с этим приходится проектировать триангуляционные се-
21
ти с небольшими сторонами и ограничивать длины полигонометрических
и нивелирных ходов.
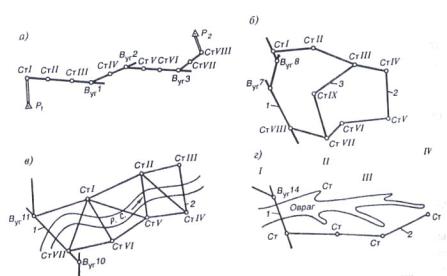
Рис. Виды съемочного обоснования тахеометрических съемок:
а – трасса линейного объекта: Р1, Р2 – пункты геодезической сети; Ст. І – Ст. VIII – съемочные точки; Вуг.1 – Вуг.3 – вершины углов поворота
трассы; б – замкнутый полигон: 1 – трасса линейного объекта; 2 – полигон, 3 – диагональный ход; в – микротриангуляция: 1 – трас-
са линейного объекта, 2 – триангуляционная сеть; г – висячий ход: 1 – трасса линейного объекта,
2 – теодолитный ход.
Развитие съемочных сетей – схема построения зависит от метода,
масштаба съемки, характера местности. При выполнении съемок геодези-
ческими методами – схема построения и плотность сетей определяется ка-
тегорией сложности местности и масштабом съемки.
Если съемочное обоснование является самостоятельной геодезиче-
ской основой, то не менее чем пятую часть пунктов по два или по три под-
ряд закрепляют постоянными знаками по типу полигонометрических грун-
тового или стенного репера. Обязательному закреплению подлежат линии
с известным дирекционным углом или астрономическим азимутом.
На местности постоянными знаками закрепляют пункты съемочного
обоснования с таким расчетом, чтобы на один планшет съемки в масштабе
1:5000 приходилось не менее трех закрепленных точек и одной точки при
съемке в масштабе 1:2000, включая пункты государственной геодезиче-
22
ской сети. Предельные погрешности координат пунктов съемочного обос-
нования не должны превышать величин, указанных в таблице 3.3.
|
|
Таблица 2.2 |
|
|
|
Масштаб съемки |
Погрешности координат, м |
|
|
Застроенные территории, |
Районы, покрытые древес- |
|
открытые районы |
ной и кустарниковой рас- |
|
|
тительностью |
1:500 |
0,10 |
- |
1:1000 |
0,16 |
0,30 |
1:2000 |
0,30 |
0,60 |
1:5000 |
0,60 |
1,50 |
Согласно Инструкции средние ошибки в положении точек планового съемочного обоснования относительно ближайших пунктов геодезической основы не должны превышать 0,1 мм в масштабе создаваемых планов то-
пографической съемки в открытой местности и 0,15 мм – в лесных райо-
нах.
При съемке незастроенных территорий в масштабе 1:1000 – 1:2000
число точек съемочного обоснования и опорных пунктов должно быть не менее 16 – 12 на 1 км2: при съемке в масштабе 1:5000 – не менее 4; 1:2000 –
12; 1:1000 – 16. При съемке застроенных территорий (и в масштабе 1:500)
количество точек определяется рекогносцировкой.
Сводом правил СП 11-104-97 предусмотрено создание постоянного съемочного обоснования на застроенных территориях.
На застроенных территориях в качестве постоянного съемочного обоснования могут служить углы капитальных зданий и сооружений, цен-
тры узловых колодцев, координаты которых определяют с надлежащим контролем. Координаты определяют полярным методом с пунктов опор-
ных плановых геодезических сетей и точек теодолитных ходов 1 порядка,
прокладываемых при съемках в масштабах 1:1000 – 1:500. Примычные уг-
лы измеряют одним полным приемом. Расхождения примычных углов в полуприемах не должны превышать
23

Δ' = 30'/L,
где L – расстояние до определенной точки (не более 50 м).
При развитии сетей съемочного обоснования на застроенных терри-
ториях определяют координаты углов капитальных зданий и сооружений,
расположенных на углах кварталов, улиц, переулков и внутри кварталов, в
районах со свободной планировкой, но не реже чем через 300 м.
2.3.1. Теодолитные ходы
Теодолитные ходы опираются на пункты геодезических и опорных меже-
вых сетей высших классов или разрядов и образуют: разомкнутые и за-
мкнутые ходы, систему ходов с одной и более узловыми точками и систе-
мы полигонов (рис. 8). При развитии самостоятельного съемочного обос-
нования теодолитные ходы образуют систему замкнутых полигонов.
24

Рис. 10. Схемы теодолитных ходов: А – разомкнутый; Б – замкнутый; В – висячий; Г – система теодолитных ходов; 1 – пункты государственной сети; 2 – диагональный ход; 3 – узловая точка.
По точности теодолитные ходы подразделяются на два разряда: теодолит-
ные ходы 1-го разряда прокладываются с относительной погрешностью не
ниже 1:2000, а 2-го разряда не ниже 1:1000. Характеристики теодолитных
ходов представлены в таблице 2.3 и в таблице 2.4 [].
|
|
|
|
|
|
|
Таблица 2.3 |
|
|
|
Предельная длина хода |
|
|||
|
|
|
|
|
|
|
|
Масштаб съемки |
|
Между опорными пунктами или узловыми |
Между исходными |
||||
|
|
пунктами в самостоятельных сетях, км |
пунктами и узло- |
||||
|
|
На застроенных |
|
На незастроенных |
выми точками, км |
||
|
|
территориях |
|
территориях |
|
||
1:500 |
|
0,8 |
|
1,2 |
|
0,7 |
|
1:1000 |
|
1,2 |
|
1,8 |
|
1 |
|
1:2000 |
|
2 |
|
3 |
|
1,5 |
|
1:5000 |
|
4 |
|
6 |
|
3 |
|
|
|
|
|
|
|
|
Таблица 2.4 |
|
|
|
Предельная длина линии |
|
|||
|
|
|
|
||||
Масштаб съемки |
|
На застроенных территори- |
На незастроенных террито- |
||||
|
|
|
|
ях, м |
|
риях, м |
|
1:500 |
|
|
|
100 |
|
150 |
|
1:1000 |
|
|
|
150 |
|
200 |
|
1:2000 |
|
|
|
200 |
|
300 |
|
1:5000 |
|
|
|
350 |
|
500 |
|
Число линий |
|
|
до 4 |
|
до 3 |
||
Теодолитные ходы создают методом полигонометрии, но точность измерений в теодолитном ходе существенно ниже, чем в полигонометрии
2-го разряда. В теодолитных ходах длины линий 20 – 350 м, измеряют оп-
тическими дальномерами, стальными лентами и рулетками, светодально-
мерами. При создании теодолитных ходов особенно эффективным оказы-
вается использование электронных тахеометров, а также систем спутнико-
вой навигации «GPS». Углы измеряют теодолитом типа Т30 одним прие-
мом. Допустимая средняя квадратическая погрешность угловых измерений
30" – 1'. Предельные длины ходов между пунктами опорных сетей или уз-
25
ловыми точками на застроенной территории в зависимости от масштаба съемки представлены в таблице. На незастроенных территориях длины хо-
дов могут быть увеличены в 1,5 раза. Виды теодолитных ходов, обработка и уравнивание угловых измерений и приращений координат теодолитных ходов были рассмотрены при изучении дисциплины «Геодезия».
Относительные линейные невязки не должны превышать 1:2000. В
коротких ходах (до 150 м) – 1:500, 1:1000, до 250 м – 1:2000 – 1:5000. Аб-
солютные величины невязок не должны превышать 0,1 м (1:500); 0,15 м (1:1000); 0,25 м (1:2000 – 1:5000).
2.3.2. Микротриангуляция.
В открытой местности съемочное обоснование можно развивать ме-
тодом микротриангуляции. Он особенно эффективен в пересеченной мест-
ности, имеющей крутые подъемы и спуски, на изрытых территориях, при вытянутых инженерных сооружениях, вдоль рек и т. п.
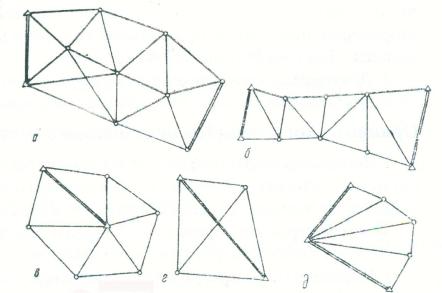
Микротриангуляцию строят в виде сплошных сетей треугольников,
цепи треугольников, центральных систем и геодезических четырехуголь-
ников, аналогично построению государственных геодезических сетей и се-
тей сгущения методом триангуляции (рис. 9).
Рис. 11. Схема сетей микротриангуляции:
а – сплошные сети; б – цепь треугольников; в – центральная система; г- геодезический четырехугольник; д – вставка в угол.
26
Допускается сочетание различных методов построения сетей микротриан-
гуляции. Сети микротриангуляции должны опираться на две исходные стороны или на исходную сторону и базис, измеренный на местности. В
свободных сетях микротриангуляция измеряют два базиса, на одном из ко-
торых определяют астрономический или магнитный азимут. Базисы изме-
ряют в прямом и обратном направлениях с относительной средней квадра-
тической погрешностью не более 1:5000. Длина цепи треугольников три-
ангуляции не должна превышать величин, указанных в таблице 3.4.
Между исходными сторонами допускается построение треугольни-
ков не более: 10 при съемке в масштабе 1:500; 15 – в масштабе 1:1000; 17 –
1:2000; 20 – 1:5000.
Углы треугольников должны быть не менее 20°, а стороны не короче
150 м. Углы измеряют теодолитами, точность которых не менее 30", двумя круговыми приемами с перестановкой лимба между приемами на 90°. Рас-
хождение приведенных к общему нолю одноименных направлений из раз-
ных приемов допускается 0',8. Невязки в треугольниках не должны пре-
вышать 1',5.
Визирными целями на точках микротриангуляция служат марки,
установленные на штативах, и вешки, установленные по отвесу.
Если величины линейных элементов центрировки и редукции пре-
вышают 1:10000 от длины сторон, то в измеренные углы вводят соответ-
ствующие поправки.
По двум измеренным углам в треугольнике вычисляют третий. По теореме синусов от исходных сторон АВ и СД вычисляют длины сторон магистрального хода. Затем вычисляют координаты точек (прямая геоде-
зическая задача). Выполненные измерения контролируют уравниванием магистрального хода между исходными опорными пунктами.
2.3.3. Методы геодезических засечек и четырехугольников
без диагоналей.
27
Если непосредственное измерение линий теодолитного хода затруд-
нено, но имеется видимость с нескольких точек хода на отдельные удален-
ные опорные пункты или предметы, то длину сторон можно получить кос-
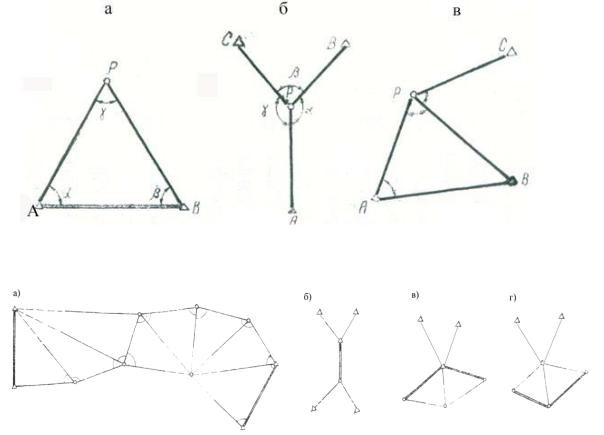
венным путем методом угловых засечек (рис. 12).
Рис. 12. Типовые схемы засечек: а – прямая засечка; б – обратная засечка; в – комбинированная засечка.
Рис. 13. Методы геодезических засечек: а) магистральный ход, б) полярный способ при непосредственном измерении расстояний; в), г) полярный способ при косвенном измерении расстояний
Отдельные точки планового съемочного обоснования определяют прямыми, обратными и комбинированными засечками (рис. 13).
При прямой засечке (рис. 12, а) по измеренным углам α и β вычисляют угол γ. По теореме синусов через базисную сторону АВ определяют длины сторон АР и ВР. Координаты точки Р определяют путем решения прямой геодезической задачи.
28
Контроль определения координат методом прямой засечки осу-
ществляют применением прямой многократной засечки (засечки точки с трех и более опорных пунктов) или измерением угла γ при засекаемой точ-
ке. Вычисления выполняют по формулам:
Р |
А S АР cos AP B S BP cos BP ; |
||||||
P |
A S AP sin AP |
B S BP sin BP ; |
|
||||
S AP |
|
S AB sin |
; S BP |
|
S AB sin |
; 180 |
, |
|
|
||||||
|
|
sin |
|
sin |
|
||
где АРи ВР - дирекционные углы соответствующих сторон треугольника.
Координаты пункта Р методом обратной засечки (рис. 12, б) опреде-
ляются надежно в случае, когда он находится внутри треугольника, обра-
зованного пунктами А, В, С.
Координаты определяемого пункта вычисляют по формулам И.Ю.
Пранис-Праневича:
Р В |
|
N |
|
; P B P ctg ; |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||||
1 ctg |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ctg |
B A |
ctg C |
B ctg A C |
|
; |
||||||||||||
|
ctg |
|
|
|
ctg |
|
|
|
|
||||||||
|
|
B |
|
A |
C |
|
B |
A |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
C |
|
|
|||||
N B A |
ctg ctg B |
A |
1 |
ctg ctg ; |
|||||||||||||
N C B |
ctg ctg C |
B |
1 |
ctg ctg , |
|||||||||||||
где Θ и Ν – вспомогательные величины.
Если определяемая точка находится внутри треугольника АВС, то применяют формулы Ансермета:
|
|
|
А РА В РВ С РС |
; |
|
|
А РА В РВ С РС |
; |
|||||||
Р |
|
Р |
|
|
|||||||||||
|
|
|
РА РВ РС |
|
|
|
РА РВ РС |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
РА |
|
1 |
; PB |
1 |
|
|
; PC |
|
1 |
. |
|
||||
|
|
|
|
|
|
|
|
||||||||
ctgA ctg |
ctgB ctg |
ctgC ctg |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|||||||
Углы А, В, С определяют как разности исходных дирекционных уг-
лов сторон на пунктах А, В и С.
Контролем обратной засечки служит наблюдение на четвертый пункт. Координаты точек определяют дважды по комбинациям любых трех направлений.
29
В методе комбинированной засечки (рис.12, в) координаты точки Р вычисляют дважды из решения прямой и обратной засечек. Допустимая разность координат в положении точек, определенных методами прямой,
обратной и комбинированной засечек, не должна превышать 0,2 мм в мас-
штабе создаваемого плана.
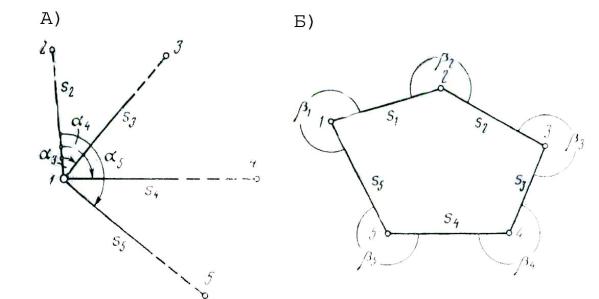
Инструкция рекомендует полярный способ определения координат точек съемочного обоснования (рис. 14, А).
Рис. 14. Съемка по способу: А – полярных координат; Б – полигона.
На территориях с прямоугольной системой застройки, в условиях лесного массива и в других случаях эффективно применение сети проф. И.В. Зуб-
рицкого, состоящей из четырехугольников без диагоналей (рис. 15).
30