

9389
.pdfn
M = ∑Mi
i=1
n
≈∑ρ(ξi ,ηi , νi ) li
i=1
В силу интегральной методологии естественно ожидать, что точное значение массы может быть получено в результате предельного перехода
n |
|
M = lim∑ρ(ξi , ηi , νi ) li |
(54.1) |
n→∞ i=1 |
|
если, конечно, при n → ∞ длина каждого отрезка |
Ai−1Ai кривой будет |
стремиться к нулю. |
|
Обобщение этой вычислительной процедуры, отвлеченное от физического содержания, приводит к понятию криволинейного интеграла 1-го рода (по длине дуги). Пусть в пространстве в некоторой области D расположена линия AB и пусть в некоторой окрестности этой
линии определена функция f ( x, y, z) . Разделим линию AB на n участков точками A0 = A , A1, A2 , A3,...,An = B. Длину участка линии от точки Ai−1 до
точки A обозначим li . На участке линии A− A выберем некоторую точку
i i 1 i
P(ξi ,ηi , νi ) и сформируем следующую интегральную сумму:
|
n |
|
|
Sn =∑f (ξi ,ηi ,νi ) li . |
|
|
i=1 |
и li →0, и он не зависит ни от |
Если существует предел S |
при n → ∞ |
|
n |
|
|
способа деления кривой AB на n частей, ни от выбора точек P(ξi ,ηi ,νi ) на
i-ом участке, то этот предел называется криволинейным интегралом 1-ого рода (по длине дуги) от функции f (x, y, z) вдоль кривой A и обозначается
как ∫
AB
∫ |
|
|
n |
l . |
|
f (x, y, z)dl = limS = lim∑ f (ξ , η , ν ) |
(54.2) |
||||
n→∞ n |
n→∞ |
i i i |
i |
||
AB |
|
|
i=1 |
|
|
Возвращаясь к задаче о нахождении массы неоднородной линии, можно с помощью введённого определения записать, что
M = ∫ f (x, y,z)dl . |
(54.3) |
AB |
|
Будем говорить, что кривая AB гладкая, если в каждой точке этой кривой существует касательная и угол наклона касательной непрерывно меняется при движении точки вдоль данной кривой. На рис. 54.2 кривая AB гладкая, а кривая LQ кусочно-гладкая, ибо в точках M и P
касательная не существует.
102
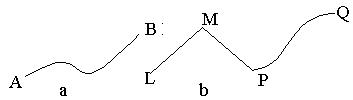
Рис. 54.2
Теорема. Если непрерывная кривая AB может быть разбита на конечное число гладких кусков и в некоторой окрестности этой кривой функция f (x, y, z) непрерывна, то для нее существует криволинейный интеграл (54.2).
Наряду со свойствами, которые имеют все рассмотренные ранее интегралы (постоянн ое число можно выносить за знак ин теграла; интеграл от суммы или раз ности двух функций равен сум ме или разности интегралов от этих ф ункций), отметим еще ряд свойст в криволинейного интеграла 1-го рода.
а) Криволинейный интеграл 1-го рода не зависит от направления
движения по кривой. Действительно, в формуле (54.2 ), |
множитель |
li |
||
равен длине i-го отрезка кривой и поэтому он не зависит |
от направления. |
|||
б) ∫ dl = L , где |
L – длина кривой |
AB . Действительно, если в (54.2) |
||
AB |
|
|
|
|
f (x, y, z) =1, то интег ральная сумма будет равна длине кривой от точки |
A |
|||
до точки B . |
|
|
|
|
в) Если точка C |
находится на кривой AB (см. рис. 54.1), то |
|
||
∫ f (x, y, z)dl = ∫ f (x, y, z)dl + ∫ f (x, y, z)dl . |
|
|
||
AB |
AC |
CB |
|
|
54.2. Вычислен ие криволинейного интеграла 1-го рода. Понятно, |
||||
что, записав формулу |
(54.3), мы еще не дали способа вычисления массы, |
|||
который бы отличал ся от вычислительной конструкции , |
приведенной в |
|||
начале параграфа. Однако анализ конструкции (54.2) показывает, что при
достаточно |
общих |
предположениях относительно с войств |
функции |
||
f (x, y, z) и кривой |
AB вычисление криволинейного интеграла 1-го рода |
||||
сводится к |
вычислен ию обычного |
определенного интеграла. |
При |
этом |
|
существенную роль играет способ задания кривой AB . |
|
|
|||
Плоский случай. Явное задание кривой. Пусть кривая |
AB |
на |
|||
плоскости определена уравнением |
y= y(x), a≤x≤b. Рассмотрим сначала |
||||
случай, когда вдоль кривой |
f (x, y) ≡ 1. Ввиду того, что |
|
|
n |
|
∫ dl = L = limn → ∞ ∑ li = L |
, |
|
AB |
i =1 |
|
|
103 |
|

получим формулу для вычисления длины дуги AB .
Рис. 54.3
Если отрезки, на которые делится кривая, достаточно малые, |
то длина li |
|||||||||||||||||
отрезка кривой Ai−1Ai приблизительно равна длине хорды Ai−1Ai . |
По теореме |
|||||||||||||||||
Лагранжа приращение |
yi |
функции |
y = y(x) на участке ( xi−1 , xi ) равно |
|||||||||||||||
значению производной в некоторой точке ξ |
i |
этого участка, умноженному |
||||||||||||||||
на приращение xi , т.е. |
y = y′( ) x . Таким образом, для плоского случая |
|||||||||||||||||
|
|
|
i |
|
|
ξ |
i |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(рис. 54.3) будем иметь |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
= |
|
|
xi |
|
|||||||
Li ≈ |
|
|
|
|
|
= |
|
|
|
|
|
1+ y′2 (ξi) |
|
|||||
|
Ai−1Ai |
|
xi2 + yi2 |
|
||||||||||||||
|
|
|
||||||||||||||||
|
|
|
||||||||||||||||
и, следовательно, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
L = ∫ dl = lim |
|
|
′ |
2 |
(ξi ) xi . |
|
||||||||||||
∑ |
1+ y |
|
|
|
||||||||||||||
|
|
|
AB |
|
|
|
|
n→∞ |
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Li →0 |
|
|
|
|
|
|
|
|
|
|
Нетрудно видеть, что под знаком предела стоит интегральная сумма для функции 1 ′ на отрезке (a,b), и потому последний
предел равен определенному интегралу от этой функции на этом отрезке. Таким образом,
b
L = ∫ dl = ∫ 1+ y′ 2 (x)dx
AB a
Пусть теперь f (x, y) – произвольная непрерывная функция, определенная в точках близких к кривой AB . Так как, согласно определению, точка Pi
на отрезке кривой Ai−1Ai может выбираться произвольным образом, то
104

выберем ее так, чтобы она имела координаты |
(ξi |
,y'(ξi)) , где ξi есть то |
|||||||||
значение аргумента x на |
отрезке |
(xi−1, xi ) , |
при |
котором |
yi = y'(ξ ) xi . |
||||||
|
|
|
|
|
|
|
|
|
|
|
i |
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
∫ f (x, y)dl = lim |
)) |
′ 2 |
(ξi |
) |
xi . |
|
|
||||
∑ f (ξi , y(ξi |
1+ y |
|
|
||||||||
AB |
n→∞ |
i=1 |
|
|
|
|
|
|
|
|
|
|
Li →0 |
|
|
|
|
|
|
|
|
|
|
Приглядевшись к выражению под знаком предела, мы видим, что оно |
|||||||||||
представляет |
интегральную |
|
сумму |
|
для |
функции |
|||||
g(x) = f (x, y(x)) |
|
|
|
|
|
|
|
||||
1+ y'2 (x) |
на отрезке |
(a, b) |
|
и |
потому предел равен |
||||||
определенному интегралу от этой функции на данном отрезке. В результате мы приходим к формуле
|
|
b |
|
|
|
|
|
|
|
|
|
′ 2 |
|
|
|
|
|
|
∫ f (x, y)dl = ∫ f (x, y(x)) |
|
(x)dx. |
(54.5) |
||||
|
1+ y |
|||||||
|
AB |
a |
|
|
|
|
|
|
то |
AB |
, |
, |
|
|
|
||
Если кривая |
на плоскости определена уравнением |
|
||||||
|
|
d |
|
|
|
|
|
|
|
|
1+ x′2 (y)dy . |
|
|||||
|
∫ |
f (x, y)dl = ∫ f (x( y), y) |
(54.6) |
|||||
|
AB |
c |
|
|
|
|
|
|
Пример. Найти массу части кривой y=2-x2 соединяющей |
||||||||
точки A(0, 2) |
и B(1,1) , если плотность распределения массы вдоль |
|||||||
кривой задана функцией ρ(x, y) =2x (рис.53.4). |
|
|||||||
Рис. 54.4
Решение. Так как y′ = −2x , то по формуле (54.3) искомая масса будет равна
105

M = ∫ ρ(x,y)d l = ∫ |
2x 1+ 4x2 dx = 1 |
∫ 1+ 4x2 d |
||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
AB |
0 |
4 |
0 |
|
|
|||||||||
= |
1 |
((1+ 4x2 )3 / 2 |
|
1 |
= |
1 |
(5 |
|
−1) ≈1, 7. |
|
|
|
||||
|
5 |
|
|
|
||||||||||||
|
|
|
|
|
||||||||||||
6 |
|
|
0 |
6 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Плоский случай. Параметрическое задание кривой.
определена параметрическими уравнениями
(1+ 4x2 ) =
Пусть кривая AB
x = x(t); y = y(t); α≤t ≤β,
где x(t) и y(t) дифференцируемые функции, производные которых
непрерывны, причем значению t = α соответствует точка |
A, а значению |
||||||
t = β соответствует точка B . В этом случае криволинейный интеграл |
|||||||
1-го рода вычисляется по формуле: |
|
|
|
|
|||
|
β |
|
|
|
|
|
|
∫ |
′ 2 |
′2 |
(t)dt. |
(54.7) |
|||
|
|||||||
f (x, y)dl = ∫ f (x(t), y(t)) x |
(t) + y |
||||||
AB |
α |
|
|
|
|
||
Для её вывода достаточно в формуле (54.7) осуществить замену переменных x = x(t); a = x(α); b = x(β), dx = xt′dt и вспомнить, что
y ′ |
= |
y ′ / x ′ . |
|
x |
|
t |
tt |
Плоский случай. Уравнение кривой определено в полярных координатах. Попробуем вывести формулу для вычисления криволинейного интеграла 1-го рода в случае, когда кривая AB на плоскости задана уравнением в полярных координатах:
r = r(ϕ) |
ϕ |
≤ϕ≤ ϕ |
(54.8) |
|
1 |
2 |
|
Вспомним, что связь между декартовыми и полярными координатами определяется формулами x = r cosϕ, y = r sin ϕ. Если в них вместо r
подставить его выражение из уравнения (54.8), то получится параметрическое уравнение кривой AB :
|
|
|
|
x = r(ϕ)cosϕ, |
|
y = r(ϕ)sinϕ. |
(54.9) |
|||||
в котором в качестве параметра выступает |
полярный угол ϕ, |
|||||||||||
изменяющийся в пределах от ϕ |
до ϕ |
. При этом |
|
|
|
|||||||
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
x |
′2 |
(ϕ) + y |
′2 |
′ |
|
|
2 |
+ (r |
′ |
(ϕ)sin ϕ + r(ϕ) cos ϕ) |
2 |
|
|
|
(ϕ) = (r (ϕ) cos ϕ − r(ϕ) sin ϕ) |
|
|
|
|||||||
= r 2 (ϕ) + r′2 (ϕ).
Подставляя это выражение в соотношение (54.7), получим формулу для вычисления криволинейных интегралов 1-го рода в случае, когда кривая АВ на плоскости задана в полярных координатах:
106

|
|
|
ϕ2 |
ϕ |
ϕ |
|
|
|
|
|
|
ϕ |
|
∫ |
f (x, y)dl |
= |
2 |
( |
ϕ + |
r |
′2 |
ϕ |
(54.10) |
||||
|
∫ |
f (r cos ,r sin |
) |
r |
) |
|
( )d . |
|
|||||
AB |
|
|
ϕ1 |
|
|
|
|
|
|
|
|
|
|
Пример. Найти массу половины кардиоиды r = (1+ cosϕ), 0 ≤ ϕ ≤ π,
если плотность ρ = r в каждой её точке.
Рис. 54.5
Пользуемся формулами (54.3) и (54.10):
|
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M = ∫ rdl = ∫ r r 2 (ϕ) + r′2 (ϕ)d ϕ = |
|
|
|
|
|
|
||||||
|
|
AB |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1 + cos ϕ)2 |
+ (-sinϕ)2 d |
ϕ = |
|
|
|
|
|||||
|
|
= ∫ (1 + cos j) |
|
|
|
|
||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
π |
j |
|
π |
|
|
|
|
psin j - |
sin3 j |
|||||
|
|
|
|
|
||||||||||
= ∫ 2 cos2 |
× 2 cos j d ϕ = 8∫ (1 - sin 2 j) × d (sin j) = 8 |
|
2 |
= |
16 |
|||||||||
2 |
3 |
|
|
|||||||||||
0 |
2 |
0 |
2 |
2 |
|
0 |
2 |
3 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Общий пространственный случай. Если кривая AB расположена в пространстве, то, как правило, она задается параметрическими уравнениями
x = x(t); y = y(t); z = z(t) α≤ t ≤ β,
причем параметру t = α соответствует точка A, а параметру t = β соответствует точка B . Предполагая, что производные x′(t), y′(t), z′(t) непрерывны при α ≤ t ≤ β, а функция f(x,y,z) непрерывна в некоторой
области D, окружающей кривую AB, и, проводя рассуждения, подобные приведенным для плоского случая, придем к следующей формуле:
|
β |
|
|
|
|
|
|
|
′ 2 |
′ 2 |
′ 2 |
(t)dx . |
(54.11) |
||
|
|
||||||
∫ f (x, y,z)dl = ∫ f (x(t), y(t),z(t)) x |
(t) + y |
(t) + z |
|||||
AB |
α |
|
|
|
|
|
|
|
107 |
|
|
|
|
|
|

54.3. Некоторы е приложения криволинейного интеграла 1-ого
рода. Определение площади цилиндрической поверхности. На рис. 54.6
изображено ограждение переменной высоты некотор ой горизонтально расположенной терр итории, ограниченной кривой L. Вопрос о расходе краски, необходимой для окраски этого огражде ния, сведется к нахождению его пло щади. Если ввести систему координат так, чтобы территория находилась в плоскости XOY, то можно считать, что данное ограждение представ ляет собой часть цилиндрической поверхности с направляющей L и образующей, параллельной оси OZ, причем высота ограждения задается функцией z = f ( x, y ) , определенно й в каждой точке
кривой L (рис.54.6). Если рассмотреть часть поверхности на небольшом
участке кривой Ai−1Ai , то можно считать, что высота этой части постоянна и
равна значению |
фун кции z = f (x, y) в некоторой точке P(x , y ). В таком |
||
|
|
i i i |
|
случае площадь |
этого участка поверхности приблизительно равна |
||
Si ≈ z(xi , yi ) L i . |
|
|
|
|
|
|
|
|
|
|
|
Рис. 54. 6
Суммируя по всем участкам и переходя к пределу в получающейся интегральной сумме, мы придем к тому, что площадь всей боковой
поверхности ограждения будет определяться по формуле |
S = ∫ z(x, y)dl . |
|||||
|
|
|
|
|
|
L |
Вычисление |
массы, |
координат |
центра |
тяжести и |
||
моментов инерции |
материальной |
кривой. Часто |
математическую |
|||
идеализацию |
пр |
остранственного |
материального |
объекта можно |
||
представить в виде |
пространственной кривой AB, вдоль которой |
|||||
распределена |
мас |
са с |
линейной |
плотностью ρ( x, y, z) (рис.54.1). |
||
(Канаты, на которых подвешен мост через пролив Босфор, соединяющий Черное и Средизем ные моря, можно рассматривать в качестве примера такого объекта. В качестве математической модели канатов можно
108

рассматривать их оссевые линии с постоянной линейной плотностью, равной массе тонкого слоя поперечного сечения). В такомм случае основные механические характе ристики подобных объектов могут быть вычислены с помощью криволинейного интеграла 1-ого рода.
а) Масса материальной кривой. Как мы уже знаем, масса М такой кривой может быть в ычислена по формуле (54.3).
б) Моменты инеерции I x, I y, I z относительно осей OX , OY , OZ . Перечисленные моменты вычисляются по следующим формулам
Ix = ∫(y2 +z2)ρ(x, y,z)dl, Iy = ∫(x2 +z2)ρ(x, y,z)dl, |
Iz = ∫(x2 +y2)ρ(x, y,z)dl. (54.12) |
|
AB |
AB |
AB |
Для их вывода, |
как обычно в таких ситуациях, разделяем кривую на |
|
мелкие участки и считаем, что вся масса отрезка кривой (приблизительно равная ρ(ξi ,ηi , νi ) Li ) сосредоточена в некоторой ее точке P(ξi , ηi , νi ).
Момент инерции этой материальной точки относительнно, например, оси OX, будет равен ее массе, умноженной на квадрат расстояния от оси, т.е. ρ(ξi ,ηi ,νi ) Li (ηi2 +νi2 ). Суммируя по всем отрезкам кривой и переходя к
пределу, получаем искомые выражения.
в) Kоординаты центра тяжести. Координаты центра тяжести C(xc , yc , zc ) материальной пространственной кривой могут быть высчитаны
по формулам:
xc = |
1 |
|
xρ(x, y,z)dl, yc = |
1 |
|
yρ(x, y,z)dl, |
zc |
= |
1 |
|
|
|
(zρ(x, y,z)dl , |
(54.13) |
M ∫ |
M ∫ |
M |
|
∫ |
||||||||||
|
|
|
|
|
|
|
|
|||||||
|
|
AB |
|
|
AB |
|
|
|
|
|
AB |
|
|
|
где M – масса кривой. |
|
|
|
|
|
|
|
|
|
|
||||
Пример. |
Найдем |
механические |
|
характеристики |
верхней |
|||||||||
полуокружности ради уса R с центром в начале координат, вдоль которой |
||||||||||||||
равномерно распределена масса с плотностью ρ . |
В да нном примере мы |
|||||||||||||
имеем дело с плоской кривой и потому в соответствую щих формулах мы должны опустить переменную z. Очевидно, что масса M равна длине полуокружности, умноженной на ρ , т.е. M = πρR .
Рис. 54. 7
109

Для нахождения моментов инерции Ix и Iy сначала запишем уравнение полуокружности в параметрическом виде
|
|
|
x = Rcost, |
|
|
|
|
|
|
y = Rsint, |
|
0≤t ≤ π, |
|||||||||||||||||||||||||
а затем воспользуемся формулой (54.11) |
(для плоского случая) и (54.8). |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Будем иметь |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
′2 |
|
|
′2 |
(t)dt |
= |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
Ix = ∫ y |
ρdl =∫ρy (t) x |
|
(t) + y |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
AB |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
R2 sin2 t + R2 cos2 tdt = |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
ρ∫ R2 sin2 t |
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
π |
|
|
|
|
|
= |
|
π |
1 |
|
− |
1 |
sin2t) = |
ρπR3 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
ρR3 ∫sin2 tdt |
|
( |
|
|
t |
|
|
|
|
|
. |
|
||||||||||||||||||||||
|
|
|
|
|
|
4 |
2 |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Нетрудно понять, что Iy |
имеет такое же значение. |
|
|
|
|
|
|||||||||||||||||||||||||||||||
Что касается |
|
|
координат центра |
|
тяжести |
|
|
|
C(xc , yc ), то в силу |
||||||||||||||||||||||||||||
симметрии |
xc |
= 0, |
а |
|
|
для |
вычисления yc опять используем |
||||||||||||||||||||||||||||||
параметрическое уравнение полуокружности: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ 2 |
|
|
|
|
′ 2 |
|
|
|
|
|
||||||||
|
|
|
|
∫ |
|
|
|
|
|
|
∫ |
|
|
|
|
|
|
|
|
x (t) + y (t)dt = |
|||||||||||||||||
|
yc = |
M |
yρdl = |
M |
ρy(t) |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
AB |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
|
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2R |
|
|||
|
= |
|
|
|
∫ρRsint |
|
R2 sin2 t + R2 cos2 tdt = |
|
. |
||||||||||||||||||||||||||||
|
πρR |
|
|
||||||||||||||||||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
110
Лекция 55. Криволинейные интегралы 2-г о рода (по координатам)
Вданной лекции мы рассмотрим еще одн у интегральную
конструкцию, котор ая, как и все рассмотренные ра нее, изначально возникла при стремлении решить некоторую прикладную задачу (именно в физике), а потом оказалась применимой при решении других теоретических и пр икладных задач. Речь идет о криволинейных интегралах 2-го рода.
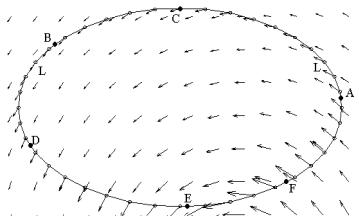
55.1. Определение и обозначения. Физическая задача, в которой подобная конструкц ия возникает, формулируется след ующим образом. Пусть в некоторой об ласти D пространства определено силовое поле, т.е. на материальную точку единичной массы, помещенную вR область D, действует зависящая от ее местонахождения вектор-сила F . И пусть в этой области материальная точка перемещается по кривой L из положения A в положение B. Требуется определить работу W сил данного поля при таком перемещении.
Рис. 55.1
На рисунке 55 .1 изображено плоское поле сил. Ясно, что при перемещении точки по кривой L по участку кривой ACB силы поля оказывают положительное воздействие, т.е. совершают положительную работу, а при движении по участку кривой DEF они оказывают отрицательное воздей ствие, т.е. совершают отрицательную работу. Точно также при спуске с горы мы ощущаем положительное воздействие силы тяжести, а при подъеме в гору нам приходится преодолевать отрицательное воздействие этой силы.
Если в пространстве введена декартова система к оординат, то сила, действующая в точке может задаваться посредством ее
R R R
разложения по едини чным векторам i , j,k
111