

7888
.pdfг) По методам расчета сооружения
-статически определимые сооружения или системы, для расчета которых достаточно уравнений равновесия статики;
-статически неопределимые сооружения или системы, для расчета которых необходимо кроме уравнений равновесия статики составление дополнительных уравнений деформаций.
д) По кинематическому признаку
- геометрически неизменяемые, т.е. такие сооружения и конструкции, которые не допускают относительные перемещения своих точек без учета деформаций стержней. Любая неизменяемая система способна воспринимать и уравновешивать внутренними усилиями любые нагрузки вплоть до потери несущей способности вследствие разрушения материала элемента этой конструкции или потери каким-либо элементом устойчивости.
Рис.8
-геометрически изменяемые, т.е. такие системы, которые допускают конечные относительные перемещения своих точек без учета деформаций стержней;
-мгновенно изменяемые системы, т.е. системы, допускающие относительные перемещения своих точек без учета деформаций стержней, после чего они становятся неизменяемыми.
Мгновенно изменяемые и изменяемые системы мало пригодны как системы зданий и сооружений, работающих под нагрузкой различного вида.
11

Задания для самостоятельной работы.
3.Литература: [1, гл. 1]; [4, гл. 1]; [2, гл. 1]; [3, гл. 1.2];
Вопросы для самопроверки:
1.Что называется расчётной схемой сооружения?
2.Классификация расчетных схем.
3.Как на расчётной схеме изображаются элементы системы, их соединения, опоры и нагрузки?
4.Кинематический анализ стержневых систем
Все здания и сооружения должны быть неизменяемыми системами, т.е. системами, способными воспринимать внешнюю нагрузку без заметного изменения своей геометрии. Поэтому, прежде чем произвести расчет любой системы на прочность, жесткость
иустойчивость, необходимо выполнить кинематический анализ этой системы, который заключается в анализе структуры системы, исследовании способа ее образования
иустановлении, является ли система геометрически неизменяемой, статически определимой или статически неопределимой.
Геометрически неизменяемой называют такую систему соединенных между собой
тел, которая не допускает относительного перемещения ее частей без их деформаций. Такая система не имеет степеней свободы по отношению к основанию или некоторым осям координат.
Степенью свободы W какого либо диска или системы, шарнирно связанных между собой дисков, называют число геометрических параметров, независимо друг от друга меняющихся при движении. Под диском при этом понимают любую геометрически неизменяемую часть системы.
Известно, что точка в плоскости имеет две степени свободы, ее положение определяется двумя координатами. Положение плоского диска (тела) в его плоскости определяется тремя независимыми переменными, например, x, y некоторой точки А и углом наклона ка- кой-либо прямой АВ. Таким образом, плоский диск в плоскости имеет три степени свобо-
ды.Степень свободы любого диска может быть стеснена какими-нибудь препятствиями, уменьшающими число независимых парамет-
ров. Всякое устройство, уничтожающее одну степень свободы, рассматривается как одна кинематическая связь. Если какое-либо уст-
ройство одновременно уничтожает несколько степеней свободы, то оно рассматривается как соответствующее число связей.
12
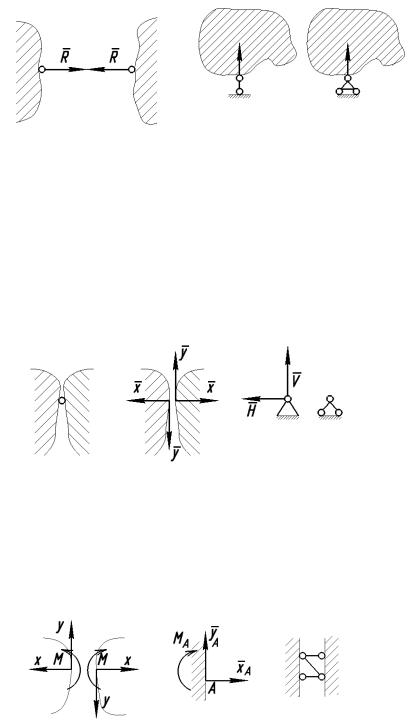
Рассмотрим три вида связей плоских систем.
Связь первого вида – стержень с шарнирами по концам. Эта связь препятствует перемещению одного диска относительно другого по направлению оси стержня. Она уничтожает одну степень свободы. Статическая характеристика такой связи – в ней может возникать реакция, направленная только вдоль стержня.
Связь второго вида – шарнир с неподвижной геометрической осью, вокруг которой диск может вращаться. Эта связь уничтожает две степени свободы, т.е. иначе говоря,
шарнир эквивалентен двум связям. Следовательно, любые две связи эквивалентны шарниру, расположенному в точке пересечения этих связей. Статическая характеристика такой связи – в шарнире может возникать реакция любого направления, проходящая через его геометрический центр. Эту реакцию можно разложить на две составляющие.
Связь третьего вида – жесткое защемление или жесткий узел. Жесткий узел препятствует всем трем взаимным перемещениям, т.е. уничтожает три степени свободы и, следовательно, эквивалентен трем связям. Статическая характеристика – в этой связи может возникать реакция любого направления, проходящая через любую её точку и момент относительно этой точки.
Таким образом, для неподвижного прикрепления точки на плоскости необходимо иметь две связи, не лежащие на одной прямой. Для неподвижного прикрепления тела
(диска) на плоскости необходимо иметь три связи, не пересекающиеся в одной точке.
13
Расчетные схемы многих сооружений имеют вид кинематических цепей, состав-
ленных из отдельных дисков или геометрически неизменяемых плоских звеньев.
Если рассматривать систему, составленную из дисков, соединенных между собой шарни-
рами и прикрепленных к основанию с помощью опорных стержней, то степень свободы такой системы легко определить. Так как каждый диск, взятый отдельно, имеет степень свободы, равную 3, то для системы, пока диски не связаны между собой, степень свободы равна утроенному числу дисков (3Д). Шарнир, связывающий два диска, уничтожает дву-
кратную степень свободы. Действительно, два диска до постановки шарнира имеют сте-
пень свободы 3+3=6. После соединения их шарниром, диски могут перемещаться только совместно и положение шарнира определиться двумя координатами, а каждый диск полу-
чает возможность независимого поворота около шарнира.
Следовательно, степень свободы будет равна 2+2=4, т.е. на 2 меньше. Таким обра-
зом, после того, как диски будут последовательно соединены шарнирами, степень свобо-
ды системы будет равна утроенному числу дисков минус удвоенное число шарниров. Ка-
ждый опорный стержень уменьшает степень свободы на единицу. Обозначим:
W – степень свободы системы;
Д – число дисков;
Ш – число простых шарниров;
Со – число опорных стержней (связей).
Тогда, на основании приведенных рассуждений, можно записать:
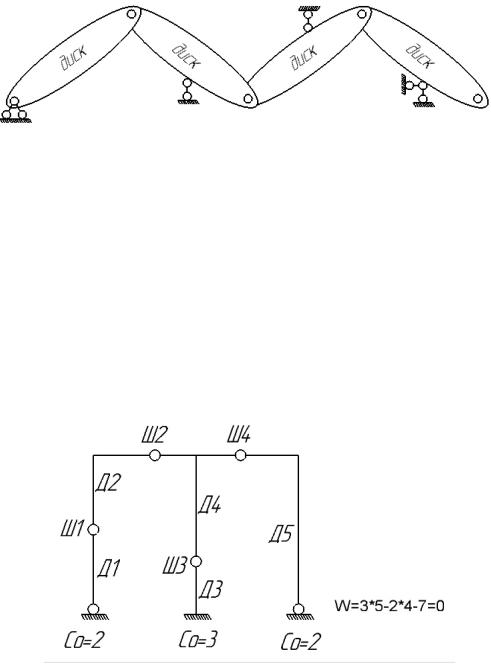
W = 3 . Д – 2 . Ш – Со (формула Чебышева). |
(1) |
Например: |
|
14
В выражении (1) под дисками понимают отдельные стержни, геометрически неизменяемые части системы, основание.
Если шарнир соединяет два стержня или диска, то его называют простым, эквивалентным двум связям. Если же шарнирный узел соединяет “n” стержней или дисков, то его называют кратным или сложным шарниром, эквивалентным (n-1) простым шарнирам или 2.(n-1) связям.
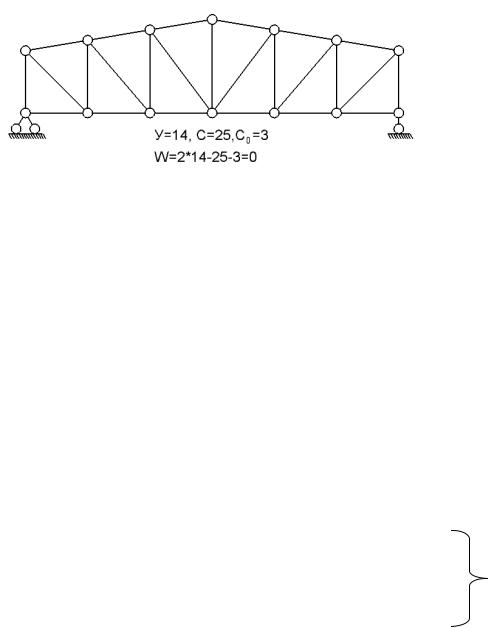
Если рассматривать шарнирные узлы “У” системы как некоторые точки на плоскости, каждая из которых обладает двумя степенями свободы, а стержни (С+Со) как некоторые связи, каждая из которых нарушает одну степень свободы, то для шарнирностержневых систем, не содержащих жестких узлов, степень свободы можно представить так:
W = 2 . У – С – Со , |
(2) |
где: У – количество полных шарнирных узлов; С – количество стержней системы; Со – количество опорных связей.
Если :
-W > 0, то система обладает подвижностью, т.е. система изменяема;
-W = 0, то число связей составляет необходимый минимум, обеспечивающий неизменяемость и неподвижность;
-W < 0, то число связей превышает необходимый минимум, но система неизменяема и содержит избыточные (лишние) связи.
Число лишних связей (Л) равно с обратным знаком степени свободы системы:
(3)
Введем понятие степень геометрической изменяемости системы (V), характери-
зующее податливость одних элементов системы по отношению к другим.
Для прикрепленной системы, степень изменяемости будет всегда равна степени свободы, т.е. V = W. Для неприкрепленной системы, степень изменяемости всегда на три единицы ниже степени свободы V = W – 3, так как любая неприкрепленная система в своей плоскости имеет три степени свободы.
Тогда, необходимое условие геометрической неизменяемости шарнирно-
стержневых систем запишется в следующем виде: - для прикрепленных систем:
V = 0, |
W = 0, 2 . У – С – Со =0, |
|
С + Со = 2.У |
|
- для неприкрепленных систем (Со = 0): |
|
|
(4) |
|
|
|
|||
V = 0, |
W - 3 = 0, 2 . У – С – 3 =0, |
|
С = 2.У - 3 |
|
|
|
15 |
|
|
|
|
|
|
|
Рассмотрим частные случаи:
-когда С + Со > 2У или С > 2У – 3 , то система имеет избыточные стержни и геометрически неизменяема при условии правильного расположения стержней;
-когда С + Со = 2У или С = 2У – 3, то система имеет необходимое количество стержней и будет геометрически неизменяемой при условии правильного расположения стержней;
-когда С + Со < 2У или С < 2У – 3, то система геометрически изменяема ввиду недостатка стержней.
Следовательно, условия геометрической неизменяемости (4) являются необходимыми, но недостаточными. Система может удовлетворять условию (4), но являться изме-
няемой. Таким образом, во всех случаях необходимо дополнительно производить анализ структуры образования системы.
Задания для самостоятельной работы.
Литература: [1, гл. 1]; [4, гл. 1]; [2, гл. 1]; [3, гл. 1.3].
Вопросы для самопроверки:
1.Что такое кинематический анализ? Его назначение.
2.Назовите основные понятия кинематического анализа.
3.Какие системы называются геометрически неизменяемыми? Геометрически изменяемыми? Мгновенно изменяемыми?
4.Что такое число степеней свободы?
5.Как классифицируются системы по степени свободы?
6.Перечислите типы связей плоских систем и для каждого из них дайте кинематическую характеристику.
7.Сколько степеней свободы имеет жесткий диск в пространстве и на плоскости? А точка?
8.На какие главные вопросы нужно ответить в ходе кинематического анализа?
9.Назовите этапы кинематического анализа.
10.Какой вид имеет необходимое условие геометрической неизменяемости системы? Почему оно является недостаточным?
11.Какой вывод делается по результатам кинематического анализа, если получается W > 0 ? А если необходимое условие неизменяемости выполняется?
12.Что такое качественный (структурный) анализ?
13.Как классифицируются простые связи по кинематическому признаку?
14.Дайте определения необходимой, лишней и ложной связей.
15.Какие геометрические параметры используются в описании кинематических признаков разных связей?
5. Анализ геометрической структуры сооружений
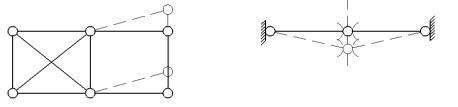
Встречаются системы, для которых выполняются условия геометрической неизменяемости, в то время как сама система обладает теми или иными степенями свободы, т.е. является изменяемой или подвижной.
Так, например:
У = 6 |
С=0, У=1, С+Со = 2У , Со=2 |
|
16 |

С=9, С=2У-3
Поэтому, в дополнение к условиям геометрической неизменяемости необходимо соблюдение требований правильного образования сооружения или системы.
Для анализа неизменяемости таких систем необходимо:
-выделить заведомо неизменяемые части системы – неизменяемые диски;
-провести анализ системы соединения между собой.
Правила образования неизменяемых систем:
а) сочленение двух дисков образует неизменяемую систему, если диски связаны между собой тремя стержнями, осевые линии которых не пересекаются в одной точке или не параллельны между собой;
б) сочленение двух дисков образует неизменяемую систему, если диски связаны шарниром и стержнем, причем центр шарнира не лежит на осевой линии стержня.
Схема соединения по первому признаку приведена на рисунке (I, II – диски, 1-3 – стержни). При отсутствии стержня 3 возможно вращение дисков относительно точки “a” – мгновенного центра вращения; при наличии третьего стержня, осевая линия которого не проходит через точку “a” система неизменяема. Однако если три стержня пересекаются в одной точке, система будет мгновенно изменяема, так как возможно бесконечно малое смещение диска путем вращения его вокруг мгновенного центра вращения “a”
Мгновенную изменяемость системы покажем с помощью статического метода. Если к диску I приложена сила P, линия действия которой не проходит через точку “a”, то система не может находиться в равновесии. Беря сумму моментов всех сил, приложенных к диску I, относительно точки “a”, получим:
Ma P u 0.
Если предположить, что осевая линия опорного стержня 3 образует небольшой эксцентриситет относительно точки “a” перемещения стержней 1 и 2, то из условия
Ma |
0 |
найдем: P u R3 0,откуда R3 P u./ .. |
При 0 |
R3 ; при |
|||
0 |
и |
P 0 будем иметь R |
|
0 |
, т.е. в мгновенно изменяемой системе при отсутст- |
||
|
|||||||
|
|
3 |
0 |
|
|
|
|
вии нагрузки усилия получают неопределенное значение, а при наличии конечной нагрузки – бесконечно большие значения.
В частном случае параллельности трех опорных стержней при действии любой нагрузки получается изменяемая система, так как вертикальными реакциями невозможно уравновесить горизонтальную силу.
17
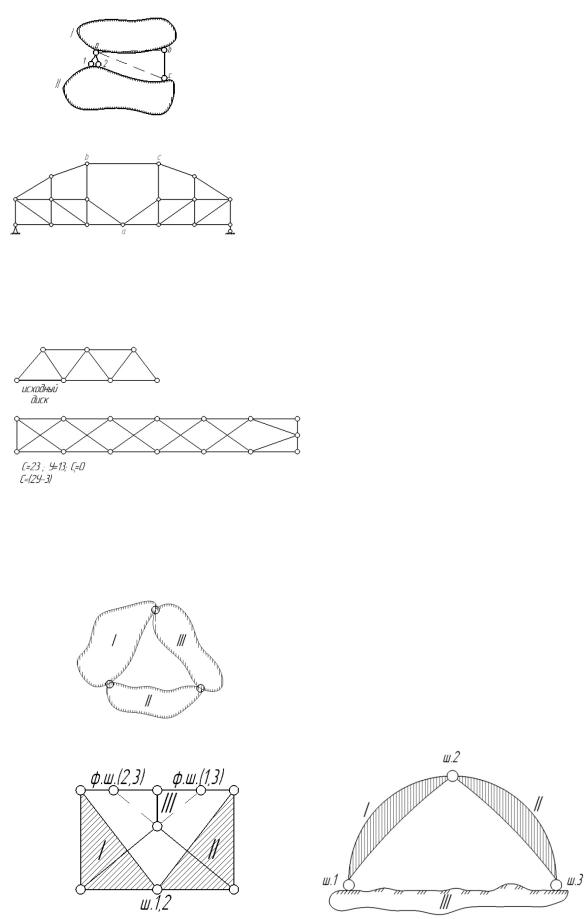
Многие системы представляют собой сочленение двух дисков шарниром и стержнем (см. рисунок).
Очевидно, треугольник 1а2 можно отнести к нижнему диску II, к которому узел “a” прикреплен двумя стержнями а1 и а2. В результате получается соединение двух дисков шарниром “a” и стержнем bc, образующими так называемый фиктивный треугольник abc. При расположении шарнира “a” на осевой линии стержня bc система становится мгновенно изменяемой.
в) Сочленение дисков диадным способом (диадный способ образования неизменяе-
мой системы). Этот способ заключается в последовательном присоединении к исходной неизменяемой системе (диску) каждого нового шарнирного узла с помощью двух стержней, не лежащих на одной прямой.
Если система будет образована таким способом, то необходимое условие геометрической неизменяемости С=2У-3 будет всегда удовлетворяться.
г). Способ образования трехшарнирной системы. Под трёхшарнирной системой понимают соединение между собой трёх дисков тремя реальными или фиктивными шарнирами. Если все три шарнира, соединяющие диски между собой, лежат на одной прямой, то трёхшарнирная система будет мгновенно изменяемой.
Под трёхшарнирной системой понимают соединение между собой трёх дисков тремя реальными или фиктивными шарнирами. Если все три шарнира, соединяющие диски между собой, лежат на одной прямой, то трёхшарнирная система будет мгновенно изменяемой.
18
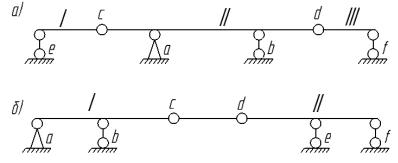
д). Способ последовательного присоединения дисков (образование многопролетных статически определимых балок).
Этот способ был вызван стремлением перекрывать большие пролеты, чем это возможно простой двух опорной балкой. Появились так называемые многопролетные шар- нирно-консольные балки (иногда их называют консольно-подвесные), представляющие собой сочленение ряда двухопорных балок с разрезными, так называемыми подвесными балками (или подвесками).
Задания для самостоятельной работы.
Литература: [1, гл. 1]; [4, гл. 1]; [2, гл. 1], [3, гл. 1.4-1.5].
Вопросы для самопроверки:
1.Способы образования неизменяемых систем.
2.Приведите пример неизменяемой системы с последовательным соединением дисков.
3.Приведите пример изменяемой системы с числом степеней свободы равным нулю.
6.Плоские статически определимые рамы
Рамы - это системы, состоящие из прямолинейных или криволинейных стержней, жестко или шарнирно связанных между собой по концам. Вертикальные и наклонные элементы рам называются стойками, горизонтальные и близкие к ним - ригелями. Рамы бывают несочлененными, то есть состоящими из одного диска, неподвижно закрепленного на плоскости, и сочлененными, состоящими из двух или нескольких дисков, соединенных между собой шарнирами. В зависимости от способов образования и видов опорных закреплений рамы могут быть балочными (безраспорными) или арочными (распорными) системами. Расчет плоских, статически определимых рам, выполняется с помощью уравнений равновесия статики и сводится к вычислению изгибающих моментов, поперечных и продольных сил в сечениях и построению эпюр внутренних усилий.
Эпюрой называется график изменения изучаемой величины в различных сечениях от заданной нагрузки.
Вычисление внутренних усилий в сечениях рамы выполняется статическим способом вырезания узлов и простых сечений. В аналитическом решении численные значения усилий определяются для каждого сечения из условий равновесия отсеченных частей рамы. Графическое решение удобно использовать при построении эпюр изгибающих моментов для простейших случаев загружения. Это позволяет определять общий характер распределения внутренних усилий, сечения с экстремальными и нулевыми изгибающими моментами.
19
6.1 Аналитический расчет рам
Аналитический расчет статически определимых рам сводится к следующему:
1. Вычисление опорных реакций связей и проверка правильности их определения. Для однодисковых рам, прикрепленных к основанию тремя связями, реакции вычисляются из уравнений равновесия плоской произвольной системы сил в трех формах:
а) |
∑ |
= 0, |
∑ |
= 0, |
∑ |
если оси и непараллельны. |
||
б) |
= 0 |
|||||||
∑ |
= 0, |
∑ |
= 0, |
∑ |
= 0,, если точкиАи В не лежат на одном пер- |
|||
пендикуляре к оси X; |
∑ |
= 0, |
∑ |
= 0, если точкиА, В и С не лежат на одной |
||||
прямойв.) ∑ |
|
= 0, |
||||||
Для сочлененных рам необходимо к этим уравнениям дополнительно составить ус- |
||||||||
ловия равновесия отдельных частей в виде |
|
|||||||
ш |
|
одн.с. |
= 0 |
, |
|
|
|
|
∑ |
|
ш |
|
|
|
|
|
|
где Ш - число простых шарниров.
Следовательно, для статически определимой рамы, имеющей Ш простых шарниров, можно составить Ш + 3 уравнения статики для определения опорных реакций.
2. Определение внутренних усилий - изгибающего момента , поперечной силы
и продольной сил в характерных сечениях рамы.
Изгибающим моментом называется сумма статических моментов всех односторонних сил от рассматриваемого сечения относительно центральной оси рассматриваемого сечения перпендикулярной силовой плоскости.
Поперечной силой называется сумма проекций всех односторонних сил от рассматриваемого сечения на ось, перпендикулярную оси стержня и лежащую в силовой плоскости.
Поперечная сила считается положительной, если вызывает вращение отсеченного элемента по часовой стрелке.
Продольной силой называется сумма проекций всех односторонних сил от рассматриваемого сечения на ось стержня.
Продольная сила считается положительной, если вызывает растяжение отсеченного элемента, и отрицательной, если - сжатие.
На основании этих определений и способа простых сечений вычисление внутренних усилий в сечениях стержней производится из уравнений равновесия статики
∑ = 0,∑ |
= 0,∑М = 0 |
, составленных для отсеченной части рамы, находящейся в рав- |
|
|
|
новесии под действием внешних сил и внутренних усилий. |
||
При |
рассмотрении равновесия той или иной отсеченной части системы не- |
|
известный изгибающий момент принимается любого направления, а неизвестные поперечная и продольная силы только положительными. Если в результате решения изгибающий момент получился отрицательным, то это значит, что растянуты противоположные волокна в стержне по отношению к первоначально принятому.
При определении усилий в сечениях отсеченной части рекомендуется рассматривать равновесие той системы, на которую действует меньшее число силовых факторов.
20