

7697
.pdfРисунок 5 – Графическая модель иерархической структуры средств перемещения неделимых грузов
11
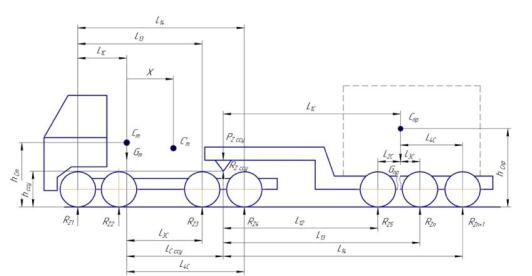
Таблица 1 – Модели транспортируемого неделимого груза
Обозначение |
Обозначение |
МО |
НАТО |
|
|
|
|
|||
ракеты |
комплекса |
США |
|
|
Стар- |
|
||||
|
|
|
Принята |
|||||||
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
товая |
||
|
|
|
|
|
|
Ø,м |
L, м |
на воору- |
||
Офи- |
|
|
|
|
|
|||||
|
|
|
|
|
масса, |
|||||
ГРАУ/ |
Офици- |
ГРАУ/ |
|
|
|
|
|
|||
|
|
|
|
|
жение |
|||||
циаль- |
Код |
Код |
|
|
|
|||||
|
|
|
|
|
т |
|||||
РВСН |
альное |
РВСН |
|
|
|
|||||
|
|
|
|
|
|
|||||
ное |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
РТ- |
15Ж58 |
Тополь |
15П158 |
SS-25 |
Sickle |
1,8 |
21,5 |
45 |
1988 |
|
2ПМ |
||||||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
РС-24 |
15Ж65 |
Ярс |
15П165М |
SS-27 |
Sickle |
2 |
23 |
50 |
2009 |
|
М |
||||||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
РТ-23 |
15Ж44 |
Молодец |
15П044 |
SS-24 |
Scalpel |
2,4 |
18,9 |
80 |
2002 |
|
|
|
|
|
|
|
|
|
|
|
|
Р-36М2 |
15A18 |
Воевода |
15П718М |
SS-18 |
Satan |
3 |
34,3 |
211 |
1991 |
|
M |
||||||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Рисунок 6 – Расчетная схема седельного СКТС
Одной из основных особенностей разработки модели СКТС является моделирование седельно-сцепного устройства (ССУ). При определении статической вертикальной нагрузки, создаваемой перевозимым грузом (табл. 1) на ССУ в основу положен следующий принцип: полуприцеп рассматривается как многоопорная система, т.е. помимо нормальных реакций под колесами полуприцепа Ri в качестве дополнительной учитывается реакция в ССУ. Дополнительно работа седельно-сцепного устройства моделируется посредством упругодемпфирующих сил, возникающих в ССУ.
Система уравнений для определения нормальных реакций на колесах полуприцепа, а также реакции в ССУ в статике имеет вид:
12
|
|
|
N |
|
|
|
|
|
|
RZ .ccy RZi Gnp ; |
||||
|
|
|
i 1 |
|
|
|
|
|
|
|
N |
|
|
|
|
|
RZil1i |
Gnpl1C ; |
(3) |
|
||||
i 1 |
|
|
|
|
|
|
|
N |
|
l1C RZ .ccy |
RZiliC |
0, |
||
|
|
|
i 1 |
|
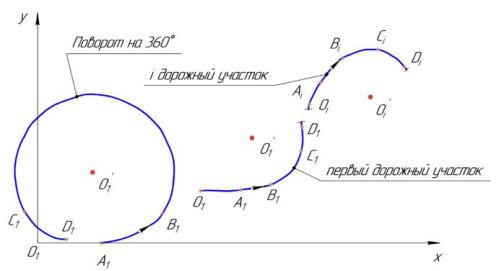
Так же участок криволинейного движения был смоделирован простыми отрезками дорожных участков (рис. 7) с углом поворота на каждом участке не более 180°. Дорожный участок включает:
–прямолинейный подучасток, характеризуемый длиной;
–входной переходной подучасток (этот подучасток характеризуется постоянной скоростью поворота переднего приведенного колеса);
–круговой подучасток заданного радиуса;
–выходной переходной подучасток (он, как и выходной, характеризуется постоянной скоростью поворота переднего приведенного колеса).
Рисунок 7 – Дорожные участки
Третья глава посвящена разработке графоаналитического метода, основанного на выявлении влияния передаточного отношения i (отношение угла поворота приведенного колеса полуприцепа пр к углу складывания ).
Для разработки графоаналитического метода разобьем его на две составные части – графическая и аналитическая.
Графическая часть будет основываться на анализе результатов геометрических характеристик топологической обстановки и траекторий маневрирования.
13

Для СКТС величина i выбирается из условия установившегося движения центров приведенных колес всех его звеньев по круговой траектории постоянного радиуса на поворотливость СКТС.
На основании расчетов на рисунке 8 представлены кривые максимальных смещений траекторий полуприцепов СКТС.
,m |
|
|
|
|
|
|
|
7,50 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
5,00 |
|
|
|
|
|
|
|
|
|
4 |
9 |
10 |
|
1 |
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
2,50 |
|
|
|
|
|
|
|
|
8 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
0,00 |
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
0,25 |
0,5 |
|
0,75 |
1 |
1,25 |
i1,5 |
Рисунок 8 – Максимальные смещения траекторий полуприцепа двухзвенного СКТС при поворотах на 90° (с радиусом = 35 м) и S-образном (с радиусами 1 = 2 = 35 м): 1, 3, 5, 7 – смещения при повороте на 90° с базой полуприцепа соответственно 10, 15, 20, 25 м; 2, 4, 6, 8 – смещения при S-образном повороте с базой полуприцепа соответственно 10, 15, 20, 25 м; 9, 10 – кривые наименьших смещений полуприцепа при поворотах соответственно
на 90° и S-образном
Зависимость смещений на входе в поворот от величины модуля передаточного отношения |i| (10) носит практически линейный характер, причем меньшим значениям |i| соответствуют меньшие величины смещений ∆.
Кривые максимальных смещений полуприцепов СКТС на S-образном повороте с радиусами 1 = 2 = 35 м приведены на рисунке 8. Следует отметить тот факт, что кривая максимальных смещений полуприцепа двухзвенного СКТС фактически представляет собой кривую смещений на участке выхода из первого поворота и входа во второй, в то время как кривая максимальных смещений полуприцепа трехзвенного СКТС состоит из двух участков: для 0 ≤ | | ≤ | п|. В качестве максимальных берутся смещения на участке выхода из первого поворота и входа во второй, а при | | > | п| – смещения на входе в первый поворот. При | | = | п| смещения на выходе из первого поворота по величине равны смещениям на входе. Но смещения
полуприцепа ∆| | | п| превосходит по величине ∆| |=| min |. Так, например, смещения полуприцепа с базой п = 25 м ∆| п|= 5,15 м, ∆| |=| min |= −4,6 м.
14
Таким образом, минимумы смещений на участке выхода из первого поворота и входа во второй являются минимумами кривых максимальных смещений на S-образном повороте.
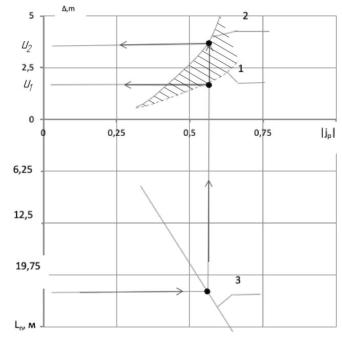
На основании кривых максимальных смещений траекторий полуприцепов двухзвенного СКТС при повороте на 90° и S-образном на рисунке 9 построена номограмма для определения величины модуля передаточного отношения | | системы поворота колес полуприцепа и соответствующих смещений траекторий ∆90 и ∆ при заданном значении п.
Х1
Рисунок 9 – Номограмма для определения величины передаточного отношения i системы поворота колес полуприцепа двухзвенного СКТС и соответствующего смещения траектории; 1, 2 – кривые смещений полуприцепа соответствующих | р| при поворотах, соответственно на 90° и S-образном; 3 – результирующая кривая для определения величины передаточного отношения i системы поворота колес полуприцепа
Для каждого СКТС с конкретной базой полуприцепа существует такое значение передаточного отношения i, которое обеспечивает наиболее приемлемые с точки зрения поворотов на 90° и S-образного величины смещения траекторий полуприцепа.
Для каждого значения базы полуприцепа существуют точки с координатами
{ 90; ∆90} и { ; ∆ }, в которых передаточные отношения системы поворота колес полуприцепа обеспечивают минимально возможные смещения
при поворотах на 90° и S-образном соответственно.
Должно быть выбрано какое-то одно передаточное отношение, которое позволит агрегату иметь смещения хотя и больше минимального, но близкие к
15
ним. Оптимальным здесь будет такое значение в интервале {90; }, которое обеспечивает увеличение смещения при поворотах на 90° и S-образном
на одну и ту же величину.
Найденное значение обеспечивает минимальную ширину дорожного полотна, необходимую СКТС при движении на криволинейных участках дороги.
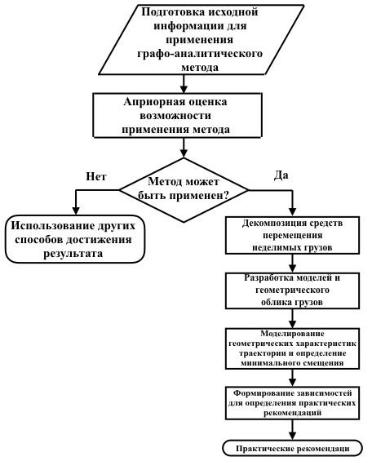
Аналитическая часть метода основывается на семантическом анализе результатов, полученных в первых главах работы и представлена в виде блоксхемы (рис. 10).
Рисунок 10 – Блок-схема аналитической части метода
Выполнение всех действий позволит получить практические рекомендации по применению результатов при проектировании геометрического облика неделимых грузов.
Четвёртая глава посвящена выработке практических рекомендаций и границ применяемости разработанных моделей.
Для определения границ применимости модели кинематики движения неделимого груза данные с учетом всех зависимостей пересчитывались и наряду с конструктивными параметрами использовались в качестве исходных данных для расчетов в программном комплексе.
16

Угол поворота левого колеса тягача связан с геометрическими размерами тягача и радиусом его поворота следующей зависимостью:
|
= |
т+2 |
|
(4) |
|
|
|||||
л |
|
|
|||
|
|
−2 |
|
||
где − радиус поворота; a – межосевое расстояние; b – колея; т – база. Согласно зависимости (4) величина радиуса поворота тягача определится
по формуле:
|
|
+ |
|
+ |
|
|
л |
|
|
2 |
2 |
|
|||||
= |
т |
|
|
|
(5) |
|||
|
|
|
|
|||||
|
|
|
|
|
||||
|
|
|
|
|
|
л |
|
|
Угол поворота переднего приведенного колеса тягача будет:
пр = т (6)
При повороте направо формулы примут вид:
|
|
|
|
|
+ |
|
|
|||
|
|
= |
|
|
т |
|
2 |
|
|
(7) |
|
|
+ |
|
|||||||
л |
|
|
|
|
||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
+ |
− |
л |
|
||||||
= |
|
т |
2 |
|
2 |
|
|
(8) |
||
|
|
|
|
|||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
л |
|
|
|
Для выявления роли поворотных колес в улучшении поворотливости СКТС были рассчитаны траектории двух- и трехзвенных СКТС с поворотными и неповоротными колесами полуприцепов.
При расчетах база полуприцепа варьировалась в пределах от 10 до 25 м. база промежуточной тележки трехзвенного СКТС сохранялась постоянной и равнялась 8 м. Траектория тягача во всех случаях была одинаковой: тягач двигался по S-образной кривой.
Характер смещения геометрии движения прицепного звена двух- и трехзвенного СКТС с поворотными колесами совсем иной. На входе в каждый поворот траектории полуприцепов как двухтак и трехзвенного СКТС забегают наружу по отношению к траектории тягача, а на выходе – внутрь (к центру кривизны). Величина смещения на выходе из первого поворота превышает таковую на участке входа в поворот. Это справедливо и для двух- и для трехзвенного СКТС и объясняется изменением направления поворота тягача.
Из анализа следует, что введение поворотных колес позволяет значительно уменьшить смещения траекторий полуприцепа (тем самым сократить полосу движения, занимаемую при повороте): в 1,7–2,2 раза – для двухзвенного и в 1,8- 2,2 раза – для трехзвенного СКТС.
17
Основные результаты и выводы
1.Проведенный анализ топологической обстановки определяет противоречие между постоянно растущими габаритами неделимых грузов и трудностью их базирования и эксплуатации при наличии имеющихся инфраструктурных ограничений (ширина полосы при повороте (Т), радиус поворота (R), ширина колеи при повороте (S)). В результате проведенного анализа сделан вывод о возможности разрешения противоречий путем вариации геометрических характеристик облика неделимого груза, транспортируемого в пределах определенного позиционного района.
2.Разработанные модели исследованы и аппроксимированы полиномами, что позволило по выявленным коэффициентам с отклонениями, не
превышающими 5%, на начальном этапе проектирования спрогнозировать геометрические характеристики неделимого груза и траекторий его движения. Созданные математические зависимости геометрических характеристик неделимых грузов и маневренности полуприцепа A=f(D; m |x; y; z| |x1; y1; z1|) от функции массы, диаметра, координат такелажных точек и центра масс удовлетворяют заданным инфраструктурным ограничениям в позиционных районах.
3.В результате исследования позиционных районов было выявлено следующее:
- минимально возможная ширина полосы криволинейного движения имеет значение варьируемое от 7 до 9 метров только при совершении маневров обеспечиваемых за счет движения точки центра задней оси по траектории движения точки центра крепления неделимого груза;
- необходимость проведения транспортной операции с заданной траекторией, имеющей ширину полосы движения (T), равную диапазону от 6 до 8 метров.
4.Разработанный графоаналитический метод построения траектории движения неделимых грузов позволяет провести анализ состояния инженерных конструкций и инфраструктурных ограничений путем использования кинематической модели движения СКТС, а также решить проблему геометрической оценки позиционного района при проведении перевооружения, что в свою очередь необходимо для выполнения задачи.
Проведенный анализ применения практических рекомендаций показал, что постановка на вооружение новых ракетных комплексов при отсутствии необходимости постройки новых или реконструкции имеющихся позиционных районов позволит сэкономить до 38 млн рублей.
18
Разработанный метод повышает качество и скорость работ по созданию СКТС на этапе предварительного проектирования в несколько раз, что подтверждается экспериментальным исследованием в АО «Мовен» и актом внедрения.
Публикации по теме диссертационной работы
Статьи, опубликованные в изданиях, рекомендованных ВАК:
1.Амосов, А.Г. Алгоритм построения геометрии движения специальных транспортных средств / А.Г. Амосов// Программные системы и вычислительные методы. – 2019. – № 4. – С. 20-29.
2.Амосов, А.Г. Устойчивость и качество работы систем автоматического
управления поворотом и полуприцепными звеньями большегрузных автопоездов / А.Г. Амосов, В.А. Голиков, М.В. Капитонов, Е.В. Михайлова, Е.Ю. Чуракова // Транспортное дело России. – 2019. – № 1. – С. 189-192.
3.Амосов, А.Г., Анализ проблем маневренности и движения при проектировании автопоездов / А.Г. Амосов, В.А. Голиков, М.В. Капитонов, Е.В. Михайлова, Е.Ю. Чуракова // Транспортное дело России. – 2019. – № 1. – С. 234236.
4.Амосов, А.Г. Выбор закона соотношения углов поворота колес транспортно-технологических агрегатов / А.Г. Амосов, А.А. Автушенко, М.В. Капитонов, М.Т. Лычкин // Известия Тульского государственного университета. Технические науки. – 2018. – № 9. – С. 329-336.
5.Амосов, А.Г. Проблематика маневренности автопоездов при проектировании / А.Г. Амосов, М.Ю. Куприков, В.А. Голиков // Известия Тульского государственного университета. Технические науки. – 2018. – № 9. – С. 342-349.
Статьи, опубликованные в научных изданиях, индексируемые в базе SCOPUS:
6.Amosov, A. Effects of tribotechnical composition, engine oil, and iso-octane on samples of elastomers of automobile technology in aviation industry./ A. Amosov, A. Azanov, S. Klopkov, A. Khodyakov // International Journal of Advanced Trends in Computer Science and Engineering (IJATCSE) – Oct 2019. – Vol.8, № 5.
7.Amosov, A. Оperational and design parameters of unified vehicles / A. Amosov, V. Golikov, M. Kapitonov, E. Mikhailova, E. Churakova // International Journal of Mechanical and Production Engineering Research Development. – Jun 2019. – Vol. 9, Issue 3. – P. 431-438.
Статьи в сборниках научных трудов и сборниках конференций:
8. Амосов, А.Г. Формирование компоновки специальных транспортных средств/ А.Г. Амосов, М.Ю. Куприков, М.Т. Лычкин // К.Э.Циолковский - 160
19
лет со дня рождения. Космонавтика. Радиоэлектроника. Геоинформатика: тез. докл. 7-й междунар. науч.-техн. конф. – 2017. – С. 280-281.
9.Амосов, А.Г. Формирование компоновик и геометрии спецтранспорта
всоставе ракетных комплексов / А.Г. Амосов, М.Ю. Куприков // Авиация и космонавтика - 2017: тез. докл. – М.: изд-во МАИ, 2017. – С. 253-254.
10.Амосов, А.Г. Инфраструктурная компоновка и геометрия транспортировщиков специального назначения из состава ракетных комплексов/ А.Г. Амосов // Гагаринские чтения – 2018: тез. докл. XLIV Междунар. молодёжной науч. конф. – 2018. – С. 29-30.
11.Амосов, А.Г. Обеспечение подвижности большегрузных транспортных
средств / Амосов А.Г., В.А. Голиков, М.В. Капитонов, М.Ю. Куприков // Молодежь. Техника. Космос: тр. X Общерос. молодежной науч.-техн. конф. – Сер. «Библиотека журнала «Военмех. Вестник БГТУ», 2018. – № 49. – С. 19-24.
12.Амосов, А.Г. Динамическая модель поворота автопоезда / А.Г. Амосов, М.Ю. Куприков // Инновационные технологии и технические средства специального назначения: тр. XI общерос. науч.-практ. конф. – СПб., 2019. – С.222-225.
13.Амосов, А.Г. Инфраструктурное влияние на проектирование составных частей транспортных агрегатов/ Амосов А.Г., В.А. Голиков, М.В. Капитонов, М.Ю. Куприков// Новые материалы и технологии для ракетнокосмической и авиационной техники: сб. матер. молодежной конф. – М., 2018. – С. 111-115.
14.Amosov, A. Тheory of curvilineal motion of multi-link trains / A. Amosov M. Kuprikov // The 60th International Scientific Conference of Daugavpils University.
– May, 2018. – Р. 9-15.
20