

7289
.pdf(6)
или
(7)
Целью эксперимента может быть, например, построение зависимости (6)
при минимальном количестве измерений значений управляющих параметров xi.
На первом этапе планирования эксперимента необходимо выбрать об-
ласть определения факторов xi. Выбор этой области производится исходя из априорной информации. Значения xi называются уровнями управляющего па-
раметра [2].
Если выбрана линейная модель (5), то для построения аппроксимирую-
щей функции достаточно выбрать основной уровень и интервал варьирования управляющего параметра xi.
Для линейной модели интервал варьирования можно определить как
I |
xmax xmin |
, |
(8) |
|||
2 |
||||||
|
|
|
|
|||
а основной (нулевой) уровень – как среднее значение |
|
|||||
x |
xmax xmin |
. |
(9) |
|||
|
||||||
0 |
2 |
|
|
|
||
|
|
|
|
|||
Для упрощения планирования эксперимента принято вместо реальных
(натуральных) уровней использовать кодированные значения факторов. Для факторов с непрерывной областью определения это можно сделать при помощи следующего преобразования
|
~ |
xj0 |
|
|
|
xj |
|
xj |
, |
(10) |
|
|
|
||||
|
|
|
Ij |
|
|
где ~xj – натуральное значение фактора; Ij – интервал варьирования; xj0 – ос-
новной уровень; xj – кодированное значение.
В результате xj принимает значения на границах xj 1, на основном уровне xj 0. Основная проблема состоит в выборе области варьирования, по-
скольку эта задача является неформализованной.
21
Рассмотрим полный факторный эксперимент на примере линейной модели.
Если число факторов k, то для проведения полного факторного эксперимента нужно N 2k опытов, где 2 – число уровней, которого достаточно для постро-
ения линейной модели.
Условие проведения этого эксперимента можно зафиксировать в матрице планирования (табл.5).
Таблица 5
Номер опыта |
x1 |
x2 |
y |
1 |
-1 |
-1 |
y1 |
2 |
+1 |
-1 |
y2 |
3 |
-1 |
+1 |
y3 |
4 |
+1 |
+1 |
y4 |
Таким образом, для двух факторов построение матрицы планирования элементарно. Для большего числа факторов необходимо разработать правила построения таких матриц. Например, при появлении фактора x3 в табл.5 про-
изойдут следующие изменения (табл. 6): при появлении нового столбца каждая комбинация уровней исходной таблицы проявится дважды.
|
|
|
|
Таблица 6 |
|
Номер опыта |
x1 |
x2 |
x3 |
y |
|
1 |
-1 |
-1 |
+1 |
y1 |
|
2 |
+1 |
-1 |
+1 |
y2 |
|
3 |
-1 |
+1 |
+1 |
y3 |
|
4 |
+1 |
+1 |
+1 |
y4 |
|
5 |
-1 |
-1 |
-1 |
y5 |
|
6 |
+1 |
-1 |
-1 |
y6 |
|
7 |
-1 |
+1 |
-1 |
y7 |
|
8 |
+1 |
+1 |
-1 |
y8 |
|
Это не единственный способ расширения матрицы планирования. Ис-
пользуют также перемножение столбцов, правило чередования знаков.
Очень важны общие свойства матрицы планирования:
1) Симметричность матрицы относительно центра эксперимента: xi 0.
N
Тогда xji 0.
i 1
22
N
2) Условие нормировки x2ji N , то есть сумма квадратов элементов
i 1
каждого столбца равна числу опытов.
Первые два свойства относятся к построению отдельных столбцов матрицы.
N
3) Совокупность столбцов имеет следующее свойство xji xni 0, где
i 1
j n.
4) Ротатабельность. Это означает, что точки (значения факторов) в мат-
рице планирования подбираются так, что точность предсказания выходного па-
раметра должна быть одинакова на равных расстояниях от центра эксперимента
(нулевого уровня) и не зависеть от направления.
3.2.2 Планирование эксперимента при оптимальных условиях
Нахождение оптимальных условий для исследуемого объекта – важней-
шая практическая задача [1]. Чаще всего при многофакторном эксперименте требуется найти значения факторов xi такие, при которых отклик системы y
принимает значения ymax или ymin. Таким образом строится целевая функция от-
клика
y y(x1,x2,...,xk ), |
(11) |
и задача оптимизации сводится к нахождению x1опт ,x2опт,...,xkопт , |
обеспечива- |
ющих экстремум функции цели |
|
y(x1опт,x2опт,...,xkопт ) ymin (ymax). |
(12) |
Кроме того, на значения факторов накладываются дополнительные огра- |
|
ничения |
|
yi (x1,x2,..., xk ) , , Ri , где i 1...r. |
(13) |
Таким образом, задачей оптимизации является нахождение экстремума функции отклика при том условии, что сама функция априори неизвестна. Та-
кая задача может быть решена многими способами [1]:

23
1. Путем полного факторного эксперимента строится нелинейная модель функции отклика и затем у этой функции находится экстремум. Такая модель может оказаться сложной и потребовать большого числа опытов, так как требо-
вания нахождения ее экстремума могут заставить проводить полный фактор-
ный эксперимент в широком диапазоне варьирования и при большом числе опытов.
2. Более практически приемлемым оказывается «пошаговый» подход к решению задачи нахождения экстремума. В этом случае эксперимент прово-
дится в ограниченной области. Находится направление роста функции отклика
(при нахождении максимума) или направление падения функции отклика (при нахождении минимума). Затем эксперимент проводится в следующей области и т. д. Таким образом, осуществляется последовательный поиск экстремума функции отклика. В этом случае задача оптимизации может быть решена без полного описания функции отклика во всей области варьирования факторов.
При последовательном нахождении экстремума достижение максимума за наименьшее количество шагов происходит при последовательном движении по направлению наибольшего возрастания (убывания) функции отклика, то есть по направлению градиента
grad y(x) |
дy |
x |
|
дy |
x |
... |
дy |
x |
, |
(14) |
||
дx |
|
|
||||||||||
|
1 |
|
дx |
2 |
2 |
|
дx |
k |
k |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
где x1, x2, ..., xk – орты соответствующих координатных осей.
При достижении экстремума выражение (14) меняет знак на противопо-
ложный. При осуществлении пошагового движения методом градиента одно-
временно меняются значения всех факторов. |
Приращение |
переменных |
||||||
x1, x2, ..., xk выбирается пропорционально |
соответствующей |
составляющей |
||||||
градиента, то есть алгоритм имеет вид: |
|
|
|
|
|
|
||
|
дy(x(L)) |
дxj |
|
|
||||
x(jL 1) x(jL) h(L 1) |
|
|
|
, |
(15) |
|||
k |
|
дy(xL ) 2 |
||||||
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
дxj |
|
|
|
|
||
|
j 1 |
|
|
|
|
|||
24
где x(jL 1) – значение переменной после L-го и (L+1)-го шагов; h(L 1) – размер
шага.
При нахождении экстремума градиентным методом необходимо на каж-
дом шаге измерений строить гиперплоскость для нахождения градиента, то есть проводить не менее, чем (k+1) опыт. Наибольшее практическое применение по-
лучила разновидность градиентного спуска – метод крутого восхождения
(быстрого спуска), названный по имени автора Бокса-Уилсона [1].
В этом методе градиент функции отклика определяется только в началь-
ной точке и в дальнейшем движение осуществляется в этом выбранном направ-
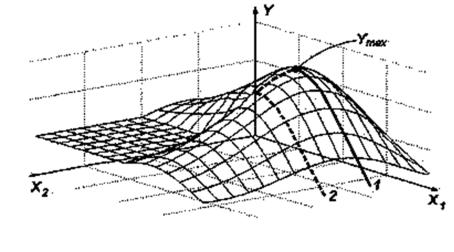
лении, но вычисление градиента на каждом шаге не производится. Пошаговое движение осуществляется до попадания функции в частный оптимум (экстре-
мум функции в выбранном направлении – кривая 2 на рис.7). В точке частного экстремума находится вновь градиент и определяется направление дальнейше-
го движения и т. д.
В результате пошагового движения обоими методами экспериментатор попадает в квазистационарную область, близкую к точке оптимума. Эта область априори не может быть описана гиперплоскостью и требует описание в виде нелинейной модели (гиперболоида, параболоида и т. д.).
Рис.7
25
При k = 2 общий вид функции отклика второго порядка будет следую-
щим:
y a |
0 |
a x |
a |
2 |
x |
2 |
a |
3 |
x2 |
a |
4 |
x x |
2 |
a |
5 |
x2. |
(16) |
|
|
1 |
1 |
|
|
|
1 |
|
1 |
|
2 |
|
|||||||
Для определения такой поверхности факторы x1, x2, должны варьировать-
ся не на двух, а минимум на трех уровнях. Эксперимент в этом случае требует не менее шести опытов для двух факторов (по числу коэффициентов в уравне-
нии (16)).
а) |
б) |
Рис.8
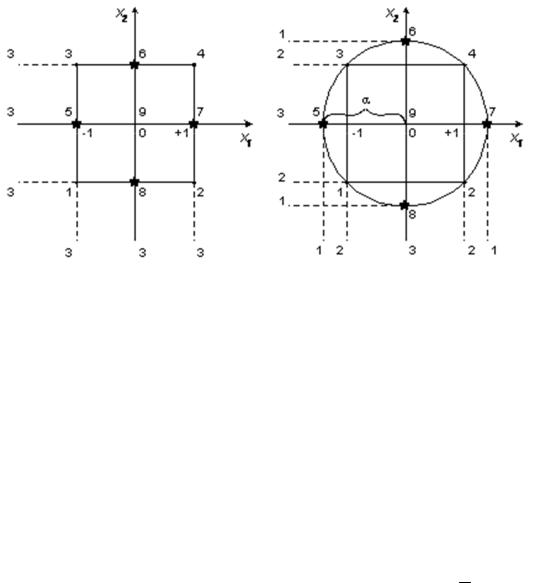
На рисунке 8 показан выбор дополнительных точек для такого экспери-
мента. К опытам 1, 2, 3, 4 для построения плоскости добавляются опыты 5, 6, 7, 8 и, обязательно, точка 9 в центре квадрата.
Если дополнительные точки располагаются на сторонах квадрата
(рис.8, а), то направление из вершин через центр определяет кривизну поверх-
ности. План представленный на рисунке 8, а избыточен (девять опытов для определения шести коэффициентов), но неротатабелен. Для обеспечения рота-
табельности точки 5, 6, 7, 8 необходимо удалить от центра тяжести на расстоя-
ние а, названное звездным плечом. Звездное плечо имеет в 
 2 раз большую длину, чем сторона квадрата.
2 раз большую длину, чем сторона квадрата.
За ядро плана принимают ПФП для k факторов, к ним прибавляют 2k
звездных точек на расстоянии a от центра плана. Звездное плечо a определяется по формуле:

26
k p |
|
a 2 2 , |
(17) |
где k – число факторов; p – дробность реплики.
Кроме того, планируется n0 опытов в центре плана (точка 9 на рис. 8).
3.3 Проведение эксперимента
Последовательность проведения активного эксперимента [3]:
1.Разрабатывается схема проведения исследований, т. е. выполняется планирование эксперимента;
2.Осуществляется реализация опыта по заранее составленному исследо-
вателем плану, т. е. осуществляется сам активный эксперимент; 3. Выполняется обработка результатов измерений.
Для того чтобы провести эксперимент в соответствии с выбранным пла-
ном необходимо, прежде всего, создать экспериментальную установку. разра-
ботка конструкции такой установки выполняется специалистами, хорошо зна-
ющими соответствующую отрасль техники и имеющими опыт конструирова-
ния. Сформулируем основные требования к экспериментальной установке с по-
зиций планирования эксперимента. Они сводятся к следующему [3].
1. Все факторы, включенные в план эксперимента, должны быть регули-
руемыми, т. е. в установке должны быть предусмотрены регулирующие органы,
позволяющие изменять эти факторы по крайней мере в тех пределах, в которых это предусмотрено планом эксперимента. Установка факторов должны быть достаточно точной, а их значения должны быть стабильными и не изменяться в процессе эксперимента.
В соответственных случаях установка должны снабжаться системами ав-
томатической стабилизации задаваемых значений факторов.
2. Все факторы, включенные в план эксперимента, должны быть измеря-
емыми, т. е. на пульте управления должны быть установлены измерительные приборы, позволяющие с заданной (желаемой) точностью определять текущие
27
значения факторов. Если системы стабилизации факторов отсутствуют, если их значения подвергаются изменениям, независящим от воли экспериментатора,
то измерительные приборы должны быть самопищущими.
3. Если существуют факторы, которые регулировать невозможно (или очень сложно, или дорого), то их необходимо хотя бы измерять. Приборы для измерения таких факторов также должны быть установлены на пульте управле-
ния установкой.
4. Если какие-то из этих факторов измерить невозможно, то их надо по крайней мере знать и стараться по возможности исключить их влияние кон-
структивными, схемными или технологическими приемами.
5. Выходные величины или, как иногда называют, отклики, также долж-
ны измеряться, а лучше записываться. И здесь необходимо обеспечить макси-
мально возможную точность.
6.Стрелочные приборы целесообразно заменить цифровыми.
7.Датчики и узлы экспериментальной установки должны быть надежны-
ми и как можно меньше подвергаться износу.
После создания экспериментальной установки необходимо определить число повторений опытов. Рекомендации по этому вопросу содержаться в спе-
циальной литературе. Обычно исследователи рассчитывают число повторений,
минимально необходимое для обеспечения заданной предельно допустимой ошибки. Иногда при этом минимизируют затраты на проведение эксперимента или ограничивают их допустимым значением. На практике даже такая поста-
новка задачи вызывает определенные затруднения. Поэтому, как правило, экс-
периментаторы принимают минимальное число повторений n, равное трем.
После того, как установлено число повторений необходимо определить порядок проведения опытов. Здесь важно обеспечить такой порядок, чтобы от него не зависели результаты эксперимента.
Ведь в процессе эксперимента объект исследований изменяется, в нем происходят необратимые изменения. Поэтому результат эксперимента зависит от порядка проведения, от номера опыта. Избавиться от такой зависимости

28
можно путем рандомизации, т. е. внесения элемента случайности в порядок вы-
полнения опытов.
На практике применяют два способа рандомизации: методом подбрасы-
вания монет и с помощью таблиц случайных чисел.
Суть метода подбрасывания монет состоит в следующем. Каждый фактор идентифицируется монетой определенного достоинства.
3.4 Обработка результатов эксперимента
Так как эксперимент содержит элемент неопределенности вследствие ограниченности обрабатываемых данных, то расстановка повторных или па-
раллельных опытов не дает полностью совпадающих результатов [6]. Получае-
мая погрешность (воспроизводимости) оценивается стандартными методами усреднения, то есть
1 |
n |
|
||
y |
|
|
yq, |
(18) |
|
||||
|
|
n q 1 |
|
|
где n – число параллельных опытов.
В этом случае дисперсия равна
|
1 |
n |
|
|
2 |
|
|
σ2 |
|
|
|
yq y . |
(19) |
||
|
|||||||
|
|
т 1q 1 |
|
|
|
|
|
Если учесть, что матрица планирования состоит из серии опытов, то оценка дисперсии всего эксперимента получается в результате усреднения дис-
персии всех опытов. В этом случае говорят о дисперсии воспроизводимости не одного опыта, а эксперимента в целом. Такая дисперсия равна
|
N n |
yiq |
|
2 |
|
|
|
|
|
y |
|
|
|||
σ2 y |
i 1q 1 |
|
|
|
|
, |
(20) |
N n 1 |
|
||||||
|
|
|
|
||||
29
где N – число различных опытов (число элементов в матрице планирования); n – число повторяемых опытов.
Формула (20) справедлива, если соблюдается равенство числа повторных опытов во всех экспериментальных точках матрицы планирования. На практике в разных точках бывает выполнено разное число опытов. В этом случае для оценки дисперсии воспроизводимости пользуются средневзвешенным значением:
N
fiσi2
σ2(y) |
i 1 |
, |
(21) |
|
N |
||||
|
|
|
fi
i 1
где σi2 – оценка дисперсии i-го опыта; fi – число степеней свободы в i-ом опыте;
это число рассчитывают как fi ni 1 (число параллельных опытов минус 1) [6].