

7205
.pdf10
|
|
|
|
Таблица 2 |
|
|
|
|
|
|
|
Число факторов |
Дробная реплика |
Обозначение |
Количество опытов |
||
ДФЭ |
ПФЭ |
||||
|
|
|
|||
3 |
½ реплика от 23 |
23-1 |
4 |
8 |
|
4 |
½ реплика от 24 |
24-1 |
8 |
16 |
|
Различные виды экспериментов схематично представлены на рис.1.
а) |
б) |
в) |
|
Рис. 1 |
|
Однофакторный пассивный эксперимент проводится путем выполнения n пар измерений в дискретные моменты времени единственного входного па-
раметра х и соответствующих значений выходного параметра у (рис. 1, а). Ана-
литическая зависимость между этими параметрами вследствие случайного ха-
рактера возмущающих воздействий рассматривается в виде зависимости мате-
матического ожидания у от значения х, носящей название регрессионной. Це-
лью однофакторного пассивного эксперимента является построение регресси-
онной модели – установление зависимости y f (x) [5].
Многофакторный пассивный эксперимент проводится при контроле зна-
чений нескольких входных параметров xi (рис. 1, б) и его целью является уста-
новление зависимости выходного параметра от двух или более переменных y f (x1, x2 , ..., xi ) .
Полный факторный эксперимент предполагает возможность управлять объектом по одному или нескольким независимым каналам (рис. 1, в).
11
В общем случае, схема эксперимента может быть представлена в виде,
представленном на рисунке 1, в. В схеме используются следующие группы па-
раметров:
1.управляющие (входные xi );
2.параметры состояния (выходные Y );
3.возмущающие воздействия (Wi ).
При многофакторном и полном факторном эксперименте выходных па-
раметров может быть несколько.
Управляющие параметры xi представляют собой независимые перемен-
ные, которые можно изменять для управления выходными параметрами.
Управляющие параметры называют факторами. Если i 1 (один управляющий параметр), то эксперимент однофакторный. Многофакторный эксперимент со-
ответствует конечному числу управляющих параметров. Полный факторный эксперимент соответствует наличию возмущающих воздействий в многофак-
торном эксперименте.
Диапазон изменения факторов xi или число значений, которое они могут принимать называется уровнем фактора.
Полный факторный эксперимент характеризуется тем, что при фиксиро-
ванных возмущающих воздействиях Wi минимальное число уровней каждого фактора равно двум. В этом случае, зафиксировав все факторы xi кроме одного,
необходимо провести два измерения, соответствующих двум уровням этого фактора. Последовательно осуществляя такую процедуру для каждого из фак-
торов xi , получим необходимое число N опытов в полном факторном экспери-
менте для реализации всех возможных сочетаний уровней факторов N 2k , где k – число факторов [5].

12
3. МОДЕЛИРОВАНИЕ ОБЪЕКТА И ПЛАНИРОВАНИЕ
ЭКСПЕРИМЕНТА
3.1 Моделирование и экспериментальные измерения
Одной из главных задач эксперимента, как уже отмечалось, является по-
лучение и проверка математической модели объекта, описывающей в количе-
ственной форме взаимосвязи между входными и выходными параметрами объ-
екта. Входные параметры, которые могут быть изменены, называют фактора-
ми. Для каждого фактора до измерения устанавливается область определения,
которая может быть непрерывной и дискретной. Часто непрерывная область определения искусственно дискретизируется. В теории планирования экспери-
мента объект исследований принято представлять в виде «черного ящика», а
его математическая модель описывает функциональные связи между входными и выходными параметрами. Главными требованиями, предъявляемыми к мате-
матическим моделям объектов, являются удобство математического использо-
вания и интерпретируемость модели. Кроме того, всегда должны быть обозна-
чены пределы применимости модели. Если эти требования не выполняются, то при использовании и экспериментальной проверке моделей неизбежно возни-
кают методические погрешности, и погрешности адекватности [6].
Можно выделить следующие задачи проверки моделей (рис. 2):
1. Построить «черный ящик», который будет нужным образом откликать-
ся на заданное входное воздействие.
2. Имея «черный ящик», зная входные и выходные сигналы, получить
(смоделировать) его содержимое.
Рис. 2
13
Суть процесса моделирования можно пояснить на примере анализа элек-
тронной схемы, в результате которого будут получены определенные выходные сигналы. Можно проверить модель, собрав экспериментальную схему и сняв реальные выходные сигналы. При этом неизбежны расхождения между сигна-
лами модельными и реальными. Чтобы выяснить причины расхождения, необ-
ходимы эксперименты с отдельными элементами схемы [6].
Необходимая корректировка модели может быть выполнена следующим образом:
1.Проверка расхождений – экспериментальная проверка характеристик всех элементов и их сравнение с модельными;
2.Исправление характеристик отдельных элементов в исходной модели;
3.Сопоставление полученных зависимостей с экспериментальными (ис-
ходными).
Таким образом, построение и проверка модели, адекватно описывающей работу электронной схемы, в общем случае требует очень большого количества экспериментальных измерений. Планирование эксперимента позволяет опти-
мизировать число измерений [6].
Например, электронная схема состоит из транзисторов, резисторов, кон-
денсаторов и катушек индуктивности. Если номинальные значения пассивных электронных элементов (резисторов, конденсаторов и т. д.) совпадают с их ре-
альными значениями с необходимой точностью, то несовпадение между мо-
дельными и реальными сигналами чаще всего возникает из-за несоответствия реальных рабочих характеристик активных элементов (транзисторов, микро-
схем и т. д.). Поэтому опытные схемотехники подвергают проверке лишь от-
дельные узлы схемы, по сути, интуитивно планируя эксперимент исходя из своего опыта и используя априорную информацию.
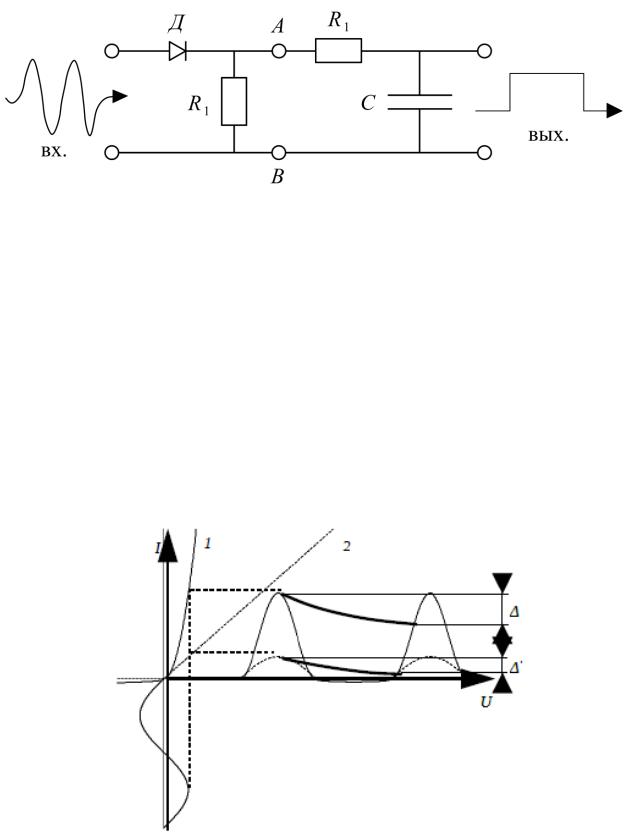
Рассмотрим пример моделирования простейшего четырехполюсника, осу-
ществляющего выделение огибающей (детектирование) радиосигнала (рис. 3).
14
Рис. 3
Четырехполюсник состоит из двух простейших схем:
1.детектора на диоде Д с выходным резистором R1;
2.интегрирующей цепи R1C.
Сигналы на выходе детектора АВ и выходе интегрирующей цепи показа-
ны на рис. 4. Здесь кривые 1 и 2 соответствуют различным вольтамперным ха-
рактеристикам (ВАХ) диода. Детектор отрезает отрицательные полупериоды сигнала, а интегрирующая цепь – выделяет его огибающую. Качество выделе-
ния огибающей будет определяться отклонением ∆ от «идеального» сигнала.
Рис. 4
Величина ∆ в свою очередь зависит от характеристик, как детектора, так и интегрирующей цепи. В детекторе она будет определяться вольтамперной ха-

15
рактеристикой (ВАХ) диода Д, а в интегрирующей цепи – соотношением между емкостью конденсатора С и сопротивлением R2.
Как видно из рис. 4, амплитуда выходного сигнала детектора, соответ-
ствующая ВАХ-1, выше, что неизбежно приведет к увеличению ∆ в результи-
рующем сигнале. С другой стороны, уменьшение емкости конденсатора инте-
грирующей цепи также приводит к увеличению ∆. При моделировании схемы несовпадение между расчетными и реальными сигналами требует внесения корректировки в характеристики, задаваемые в модели.
В общем случае четырехполюсник может рассматриваться как объект,
схема которого показана на рис. 5. Характеристики отдельных элементов схемы
(ВАХ диода и величины остальных пассивных элементов) могут считаться фиксированными параметрами (управляющими). В зависимости от плана экс-
перимента эти параметры можно рассматривать и как входные факторы, кото-
рые задаются дискретно.
Рис. 5
Экспериментальные измерения принято разделять на три основных вида:
1. прямые измерения, при которых непосредственно регистрируются зна-
чения измеряемой величины (например, измерение напряжения U вольтмет-
ром);
2. косвенные измерения (например, измерения силы тока I амперметром,
активного сопротивления R омметром и расчет U IR );
То есть косвенные измерения – это получение величины y f (x1, x2 , ...)
по измеренным значениям ( x1, x2 , ...).
16
3. совместные измерения (например, измерения напряжения U и силы то-
ка I при разных значениях I и построение результирующей зависимости
U U (I ) );
То есть совместные измерения – это измерения двух или нескольких неодноименных величин для построения зависимости между ними.
Планирование эксперимента предполагает не только оптимизацию числа измерений, но и уменьшение экспериментальных погрешностей. Поэтому зна-
чительную часть математического аппарата теории планирования эксперимента составляют теория ошибок, теория вероятностей и математическая статистика.
3.2 Планирование эксперимента
При планировании экспериментов чаще всего применяются планы 1-го и
2-го порядков. Планы более высоких порядков применяются редко из-за их большой вычислительной сложности [1].
Планы 1-го порядка – это планы, которые позволяют провести экспери-
мент для отыскания уравнения регрессии, содержащее только первые степени факторов и их произведения
|
|
k |
k |
k |
|
(1) |
y |
b0 |
bi xi biu xi xu |
|
biju xi x j xu ... |
||
|
|
i 1 |
i,u 1 |
i, j 1 |
|
|
|
|
|
i i |
i j u |
|
|
Планы 2-го порядка – это планы, которые позволяют провести экспери-
мент для отыскания уравнения регрессии, содержащие вторые степени факторов
|
b0 |
k |
k |
2 |
k |
(2) |
y |
bi xi bii xi |
biu xi xu ... |
||||
|
|
i 1 |
i 1 |
|
i,u 1 |
|
|
|
|
|
|
i u |
|
Планирование первого порядка:
-в качестве факторов выбираются только контролируемые и управляемые факторы (переменные);
-обеспечивается возможность независимого изменения каждого из фак-
торов и поддержание его на определенном уровне;
17
- для каждого фактора указывается интервал (+ / –), в пределах которого становится исследование.
Планирование второго порядка:
- применяется, если описание функции отклика первым порядком получа-
ется недостаточным (например, процесс носит нелинейный характер);
- каждый фактор варьируется не менее чем не трех уровнях – полный эксперимент содержит 3k (k – количество факторов) опытов.
Планирование эксперимента применяется при решении следующих типо-
вых исследовательских задач [4].
1.Определение (отсеивание) наиболее значимых факторов;
2.Количественная оценка эффектов влияния отдельных факторов и их взаимодействие на нулевую функцию;
3.Поиск оптимальных условий;
4.Построение математической модели исследуемого объекта;
5.Уточнение коэффициентов, констант, теоретических моделей, описыва-
ющих механизм явлений, и выбор наилучшей модели из ряда конкурирующих.
Приведем классический простейший пример планирования эксперимента.
Пусть нам необходимо взвесить на весах три тела разной массы А, В, С при условии, что нулевое положение весов не отрегулировано. При составлении плана эксперимента принято строить матрицу планирования. В таблице 3 при-
веден план первый план взвешивания. «1» и «-1» соответствуют наличию или отсутствию объекта на весах.
|
|
|
|
Таблица 3 |
|
|
|
|
|
|
|
№ опыта |
А |
В |
С |
Результаты |
|
взвешивания |
|||||
|
|
|
|
||
1 |
-1 |
-1 |
-1 |
y0 |
|
2 |
+1 |
-1 |
-1 |
y1 |
|
3 |
-1 |
+1 |
-1 |
y2 |
|
4 |
-1 |
-1 |
+1 |
y3 |
Эксперимент состоит из четырех опытов. При первом опыте снимаются
показания пустых весов и выставляется их нулевое положение, затем отдельно

18
взвешивается каждый из объектов. Расчет веса и погрешности измерений σ2
каждого из тел производится по следующим формулам:
A y1 y0 ; |
|
||
|
y2 |
y0 ; |
|
B |
(3) |
||
|
|
|
|
C |
y3 |
y0 ; |
|
σ2 |
A σ2 B σ2 C 2σ2 y . |
|
|
|
|
|
|
Поскольку погрешности независимых измерений складываются, а вес каж-
дого объекта получен в результате двух измерений, погрешность составляет 2σ2.
Оптимально будет провести эксперимент по схеме, показанной в таблице 4. В этом случае взвешивается отдельно каждый из объектов и все объ-
екты вместе. Непосредственное измерение погрешности y0 не проводят.
В этом случае выигрыш при проведении эксперимента заключается в том,
что масса каждого из объектов вычисляется по формулам (4), а дисперсия ре-
зультатов оказывается вдвое меньше. Этот результат получается за счет того,
что при втором плане эксперимента смещение нуля измерительной аппаратуры
(весов) исключено.
|
|
|
|
Таблица 4 |
|
|
|
|
|
|
|
№ опыта |
А |
В |
С |
Результаты |
|
взвешивания |
|||||
|
|
|
|
||
1 |
+1 |
-1 |
-1 |
y1 |
|
2 |
-1 |
+1 |
-1 |
y2 |
|
3 |
-1 |
-1 |
+1 |
y3 |
|
4 |
+1 |
+1 |
+1 |
y4 |
|
|
y |
y |
|
y |
|
y |
|
|
; |
|
A |
1 |
|
2 |
2 |
3 |
|
4 |
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
y1 y2 y3 y4 ; |
||||||||||
B |
|||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
y1 y2 y3 y4 ; |
|||||||||
C |
|||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
A σ2 y1 y2 y3 |
|||||||||||
σ2 |
|||||||||||
|
|
|
|
|
|
2 |
|
|
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
σ2 |
B σ2 C σ2 y . |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4)
y4 4σ2 y σ2 y ;4

19
Этот пример на простейшем случае показывает возможный выигрыш от изменения плана эксперимента, т. е. планирование эксперимента позволяет ли-
бо уменьшить число измерений, либо увеличить их точность.
3.2.1 Основы планирования многофакторного эксперимента
Как уже отмечалось, в общем случае объект исследования можно пред-
ставить в виде структурной схемы, показанной на рис. 6 [2].
Рис. 6
Представление объекта в виде такой схемы основано на принципе «чер-
ного ящика». Имеем следующие группы параметров:
1)управляющие (входные) xi, которые называются факторами;
2)выходные параметры yi, которые называются параметрами состояния;
3)wi – возмущающие воздействия.
Предполагается, что возмущающие воздействия не поддаются контролю и либо являются случайными, либо меняются во времени.
Каждый фактор xi имеет область определения, которая должна быть уста-
новлена до проведения эксперимента.
Комбинацию факторов можно представить как точку в многомерном про-
странстве, характеризующую состояние системы [2].
На практике целью многофакторного эксперимента является установле-
ние зависимости:
y f (x1 , x2 , ...xk ), |
(5) |
описывающей поведение объекта. Чаще всего функция (5) строится в виде по-
линома: